CONTROL PARA DOS O MÁS MOTORES DE CC, EN ESPECIAL ACCIONADORES PARA EL AJUSTE DE MOBILIARIO.
Control para dos o más motores de CC, en especial para accionadores impulsados por un motor de CC para el ajuste de mobiliario,
tal como mesas, camas, sillas, etc., estando el control adaptado para ajustar la fuente de alimentación a los motores individuales, de manera que los motores mantienen entre sí la misma o esencialmente la misma velocidad, independientemente de las diferentes cargas sobre los mismos, caracterizado porque el control comprende un dispositivo para el ajuste de la fuente de alimentación para cada motor individual, un pseudomotor conectado a cada motor individual, estando construido dicho pseudomotor para suministrar una tensión que corresponde a una velocidad del motor en base a la corriente y a la tensión suministradas al motor, en el que las tensiones del pseudomotor suministradas al dispositivo de ajuste de la fuente de alimentación se comparan con una tensión de referencia común y, cuando un motor experimenta una carga mayor que la carga de los otros motores, se reduce la tensión de referencia, de manera que se reduce la fuente de alimentación a los otros motores reduciendo la velocidad de los otros motores en correspondencia con la reducción de la velocidad de dicho un motor con la carga mayor
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DK2001/000470.
Solicitante: LINAK A/S.
Nacionalidad solicitante: Dinamarca.
Dirección: SMEDEVAENGET 8, GUDERUP DK-6430 NORDBORG DINAMARCA.
Inventor/es: BASTHOLM,JEPPE.
Fecha de Publicación: .
Fecha Solicitud PCT: 5 de Julio de 2001.
Clasificación PCT:
- H02K1/00 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02K MAQUINAS DINAMOELECTRICAS (relés dinamoeléctricos H01H 53/00; transformación de una potencia de entrada en DC o AC en una potencia de salida de choque H02M 9/00). › Detalles del circuito magnético (circuitos magnéticos para relés H01H 50/16).
Clasificación antigua:
- H02K H02 […] › MAQUINAS DINAMOELECTRICAS (relés dinamoeléctricos H01H 53/00; transformación de una potencia de entrada en DC o AC en una potencia de salida de choque H02M 9/00).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Finlandia, Chipre.
PDF original: ES-2356727_T3.pdf
Fragmento de la descripción:
La presente invención se refiere a un control para dos o más motores de CC, en especial para accionadores impulsados por un motor de CC para el ajuste de mobiliario, tal como mesas, camas, sillas, etc., en el 5 que los motores están conectados a una fuente de alimentación ajustable, y en el que el control está adaptado para ajustar la fuente de alimentación a los motores individuales, de manera que los motores mantienen mutuamente la misma, o esencialmente la misma velocidad independientemente de las diferentes cargas que soportan.
El ajuste de camas y de mesas se lleva a cabo utilizando accionadores lineales del tipo de los que comprenden un eje impulsado por un motor de CC reversible, estando dicho eje dotado de una tuerca del eje la cual, 10 directamente o bien mediante una varilla de extensión, está conectada con el elemento a ajustar. Para un escritorio de altura ajustable soportado por una sola pata a cada lado, existe un accionador lineal en cada pata, y para las camas existe uno en cada extremo para elevar el somier. El documento US 5 224 429, de Haworth Inc., describe un escritorio semejante de altura ajustable y el documento EP 488 552, de Huntleigh Technology plc, describe una cama de altura ajustable. 15
La técnica anterior para manejar los accionadores lineales obteniendo un desplazamiento uniforme entre ellos, se basa en una medición directa o indirecta de la distancia recorrida, y en una comparación entre éstas. Un enfoque típico es contar el número de revoluciones del eje o de otro elemento en la transmisión, mediante un codificador o un potenciómetro giratorio, por ejemplo tal como el descrito en la patente de EE.UU. anterior. La comparación del número de revoluciones constituye la base para el control de los motores. Se apreciará que 20 transcurre un cierto lapso de tiempo desde el comienzo de una falta de paralelismo entre los dos accionadores, antes de que pueda llevarse a cabo una regulación. Estos controles son relativamente costosos y complicados puesto que están basados en controles informáticos.
El documento US-A-4 423 360 da a conocer un control acorde con la técnica anterior.
El objetivo de la invención es dar a conocer un control sencillo y de bajo costo que pueda ser utilizado para manejar 25 dos o más accionadores con el objeto de obtener un desplazamiento uniforme entre ambos.
Según la invención, esto se consigue mediante un control tal como el definido en la reivindicación 1.
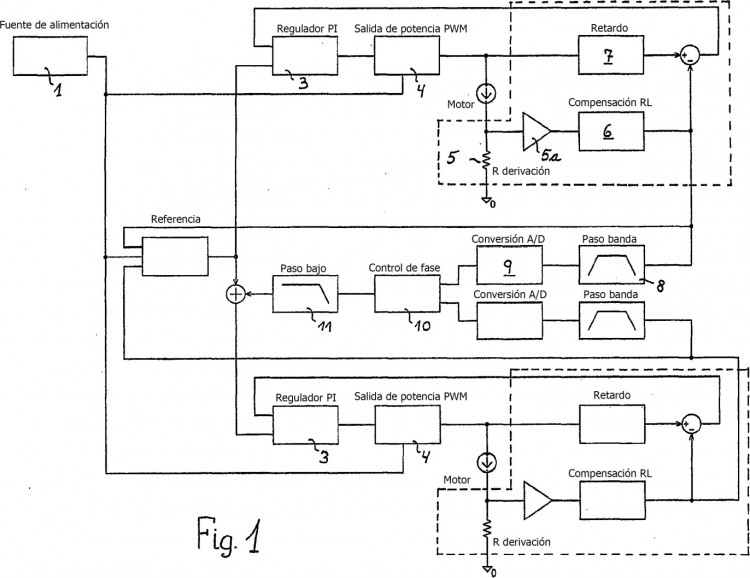
En el presente contexto, un pseudomotor es un circuito que se comporta eléctricamente como los motores de CC de interés, y que se determina en base a las propiedades eléctricas de los motores. 30
Por lo tanto, la invención consigue que el control pueda basarse en un pseudomotor y suministra una tensión correspondiente a la velocidad del motor en función de la energía suministrada al motor, utilizándose dicha tensión para la regulación de la fuente de alimentación.
Se apreciará que el control se aparta de los controles mencionados previamente, por cuanto que el accionador no tiene que recorrer una distancia antes de que pueda tener lugar el ajuste sino que, por el contrario, la 35 energía transformada en el motor se utiliza como base, permitiendo de ese modo que se realice un ajuste más rápido.
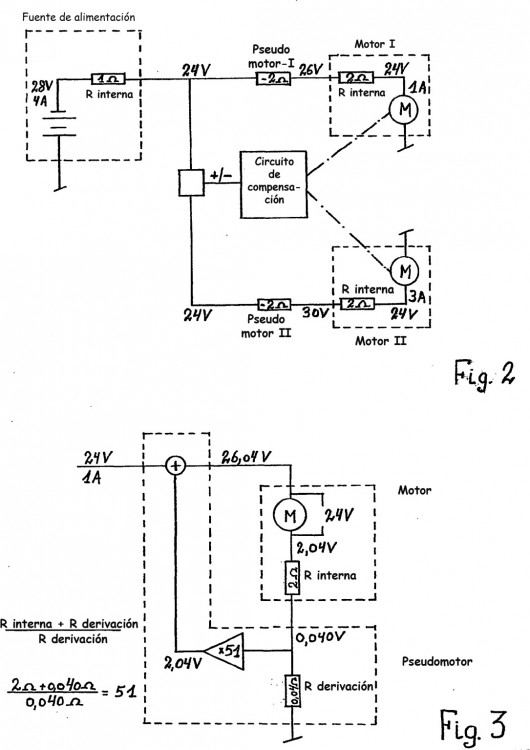
Se admite que existe una cierta desviación en los valores eléctricos de los motores, lo que tiene como resultado una imprecisión en el control. Esto es obvio puesto que el control actual comprende adicionalmente un circuito de compensación basado en la frecuencia del ruido del conmutador procedente de los motores 40 individuales, en el que se realiza una comparación de las frecuencias procedentes de los motores individuales en el circuito de compensación, y en el caso de una desviación de la frecuencia de un motor respecto a las frecuencias de los otros, se ajusta la fuente de alimentación para dicho motor o para los otros motores, de manera que las frecuencias se correspondan. Esto tiene como resultado un control muy preciso de los motores.
Se conoce el controlar un motor de CC en base a la frecuencia del ruido del conmutador, véase 45 por ejemplo el documento DE 33 05 770 A1, página 8, líneas 11 y sucesivas, pero el aspecto exclusivo de la invención es que se hace que los motores funcionen en paralelo mediante los pseudomotores, utilizándose la frecuencia del conmutador para el ajuste fino del control. Puesto que, inicialmente, las frecuencias del conmutador procedentes de los motores individuales son iguales o muy próximas entre sí, el circuito de conmutación puede responder rápidamente. Un control basado exclusivamente en la frecuencia del conmutador responderá 50 básicamente demasiado despacio, y será asimismo demasiado complicado y costoso. Debe observarse que un accionador lineal tiene una velocidad, que es habitualmente del orden de 50 mm/s, es decir, el control debe responder de manera relativamente rápida para evitar el desplazamiento no uniforme.
En las soluciones de la técnica anterior, la velocidad depende de la construcción del dispositivo de accionamiento, mientras que la invención ajusta la velocidad a través de la determinación de un valor de referencia, 55
puesto que la referencia aplica la tensión a la cual debe funcionar el motor de manera deseable. Por lo tanto, un valor de referencia elevado proporciona una velocidad elevada, y viceversa.
El presente control puede incrementarse a bajo costo y sin control por ordenador. Se apreciará que esto no excluye la posibilidad de que la invención pueda ser utilizada, en general, para el control de dos o más motores de CC. 5
La invención se explicará mejor a continuación, haciendo referencia a los dibujos adjuntos. En los dibujos:
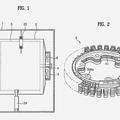
la figura 1 muestra un diagrama de bloques de una realización del control según la invención,
la figura 2 muestra un diagrama de bloques explicativo del control, para comprender mejor la invención, y
la figura 3 muestra un diagrama de bloques que muestra el motor individual. 10
A continuación haciendo referencia al diagrama de bloques de la figura 1, el presente control comprende:
- 1-: una fuente de alimentación
- 7-: un elemento de retardo
- 2-: una referencia
- 8-: un filtro de pasa banda
- 3-: un regulador PI
- 9-: una conversión A/D
- 4-: una salida de potencia PWM
- 10-: un control de fase
- 5-: una R de derivación con amplificador
- 11-: un filtro de paso bajo
- 6-: una compensación RL
- 1-. Fuente de alimentación
La fuente de alimentación comprende un transformador, un acoplamiento puente y un condensador rectificador. Suministra la energía necesaria al sistema y, por lo tanto, es el “bloque” que limita el rendimiento del 15 sistema con respecto a la carga y la velocidad de los accionadores. Las tensión no es regulada, por lo tanto, cuando se carga se superpone mediante alguna onda.
- 2-. Referencia
El "bloque" de referencia controla el sistema y determina la rapidez con la que pueden/deben funcionar los accionadores. El circuito de referencia recibe información desde los dos accionadores y la fuente de 20 alimentación y suministra una tensión de referencia en base a la información, que permite a los otros circuitos permanecer en el interior de sus rangos de regulación.
- 3-. Regulador PI
El regulador PI regula la velocidad del accionador individual ajustándola en lo posible a la tensión (velocidad) determinada por la referencia. El regulador contiene una parte proporcional P, para mantener pequeña la 25 diferencia en cambios rápidos en la carga, y una parte de integración I, para hacer que la diferencia se aproxime a cero durante un periodo de tiempo prolongado.
- 4-. Salida de potencia PWM
La salida de potencia PWM regula la energía al accionador. Esto se realiza conectando y desconectando rápidamente la fuente de alimentación al accionador. Por lo tanto, la proporción del tiempo de 30 conexión y el tiempo de desconexión determina el suministro de energía.
- 5-. R de derivación con amplificador
La... [Seguir leyendo]
Reivindicaciones:
1. Control para dos o más motores de CC, en especial para accionadores impulsados por un motor de CC para el ajuste de mobiliario, tal como mesas, camas, sillas, etc., estando el control adaptado para ajustar la fuente de alimentación a los motores individuales, de manera que los motores mantienen entre sí la misma o esencialmente la misma velocidad, independientemente de las diferentes cargas sobre los mismos, caracterizado porque el control comprende un dispositivo para el ajuste de la fuente de alimentación para cada motor individual, un 5 pseudomotor conectado a cada motor individual, estando construido dicho pseudomotor para suministrar una tensión que corresponde a una velocidad del motor en base a la corriente y a la tensión suministradas al motor, en el que las tensiones del pseudomotor suministradas al dispositivo de ajuste de la fuente de alimentación se comparan con una tensión de referencia común y, cuando un motor experimenta una carga mayor que la carga de los otros motores, se reduce la tensión de referencia, de manera que se reduce la fuente de alimentación a los otros motores 10 reduciendo la velocidad de los otros motores en correspondencia con la reducción de la velocidad de dicho un motor con la carga mayor.
2. Control, según la reivindicación 1, caracterizado porque el control comprende adicionalmente un circuito de compensación construido de acuerdo con una frecuencia del ruido del conmutador de los motores, en el que en el circuito de compensación se realiza una comparación de las frecuencias del ruido del 15 conmutador de cada uno de los motores y, en el caso de una desviación de la frecuencia de un motor en relación con las frecuencias de los otros motores, se ajusta la fuente de alimentación a dicho un motor o a los otros motores, de manera que las frecuencias del ruido del conmutador de todos los motores están dentro de un valor predeterminado.
3. Control, según la reivindicación 2, caracterizado porque la frecuencia del ruido del 20 conmutador es una frecuencia dominante.
Patentes similares o relacionadas:
Motor o generador de alta frecuencia, del 17 de Junio de 2020, de Caamano, Ramon A: Un dispositivo seleccionado del grupo de dispositivos que consta de un motor eléctrico, un generador eléctrico y un motor eléctrico regenerativo, […]
Rueda que tiene medios electromecánicos combinados de generación de electricidad que tienen una pluralidad de estructuras auxiliares de potencia, del 10 de Abril de 2019, de Jang, Suk Ho: Una rueda que incluye un medio para la generación y transferencia de potencia que tiene una pluralidad de unidades (300, 300') auxiliares de potencia, […]
Generador eléctrico de alternancia magnética mediante atenuadores, del 23 de Diciembre de 2016, de AMADOR CABRERA,LORENZO: 1. Generador eléctrico de alternancia magnética mediante atenuadores que, cantando con una o más bobinas (2, 2') que generan electricidad al recibir polaridad […]
MOTOR ELECTROMAGNÉTICO DE ESPIRAS INCOMPLETAS, del 28 de Abril de 2016, de GARAY SILVA, Luis Ignacio: El dispositivo de la presente solicitud tiene como objetivo obtener un motor que entregue una mayor cantidad de energía producida respecto de la necesaria para hacerlo funcionar, […]
 Estructura de núcleo helicoidal y método para fabricarla, del 30 de Diciembre de 2015, de LG ELECTRONICS INC.: Un núcleo helicoidal de una estructura anular de múltiples capas de núcleo de chapa de acero apiladas mientras se hace girar el núcleo de chapa […]
Estructura de núcleo helicoidal y método para fabricarla, del 30 de Diciembre de 2015, de LG ELECTRONICS INC.: Un núcleo helicoidal de una estructura anular de múltiples capas de núcleo de chapa de acero apiladas mientras se hace girar el núcleo de chapa […]
 Máquina de flotación, del 10 de Noviembre de 2015, de OUTOTEC OYJ: Una máquina de flotación para poner en flotación partículas hidrófobas de una suspensión acuosa que contiene estas partículas, que comprende
- una celda de flotación […]
Máquina de flotación, del 10 de Noviembre de 2015, de OUTOTEC OYJ: Una máquina de flotación para poner en flotación partículas hidrófobas de una suspensión acuosa que contiene estas partículas, que comprende
- una celda de flotación […]
Motor poliédrico magnético de propulsión de fluidos, del 15 de Diciembre de 2014, de ACEDO SÁNCHEZ, Eloy Francisco: 1. Un motor poliédrico magnético de propulsión de fluidos caracterizado porque tiene: - un estator destinado a fijarse en un soporte […]
Dispositivo eléctrico para variar las prestaciones de un motor eléctrico de imanes permanentes, del 19 de Marzo de 2014, de RAMOS RAMOS, Angel Gabriel: 1. Dispositivo eléctrico para variar las prestaciones de un motor de imanes permanentes caracterizado por estar formado por un conmutador, accionable […]