ARTICULACIÓN MÓVIL QUE TIENE HASTA SEIS GRADOS DE LIBERTAD.
Una articulación móvil (100) caracterizada por un único cuerpo unitario (102),
dos aberturas separadas (104, 106) en el cuerpo (102), un orificio (108) en el interior del cuerpo que interconecta las dos aberturas, dos brazos (110, 112) teniendo cada uno un extremo (120) alojado de manera amovible en una de las dos aberturas (104, 106), y un conector elástico alargado (114) que se extiende a través del orificio (108) con extremos opuestos que interconectan dicho extremo (120) de los dos brazos (110, 112)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/AU2005/001755.
Solicitante: POD I.P. PTY LTD.
Nacionalidad solicitante: Australia.
Dirección: 235 RYRIE STREET GEELONG, VICTORIA 3220 AUSTRALIA.
Inventor/es: MALONEY,Geoff.
Fecha de Publicación: .
Fecha Solicitud PCT: 18 de Noviembre de 2005.
Clasificación Internacional de Patentes:
A61F5/01D3
A61F5/01D5
Clasificación PCT:
A61F5/01NECESIDADES CORRIENTES DE LA VIDA. › A61CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61F FILTROS IMPLANTABLES EN LOS VASOS SANGUINEOS; PROTESIS; DISPOSITIVOS QUE MANTIENEN LA LUZ O QUE EVITAN EL COLAPSO DE ESTRUCTURAS TUBULARES, p. ej. STENTS; DISPOSITIVOS DE ORTOPEDIA, CURA O PARA LA CONTRACEPCION; FOMENTACION; TRATAMIENTO O PROTECCION DE OJOS Y OIDOS; VENDAJES, APOSITOS O COMPRESAS ABSORBENTES; BOTIQUINES DE PRIMEROS AUXILIOS (prótesis dentales A61C). › A61F 5/00 Procedimientos o aparatos ortopédicos para el tratamiento no quirúrgico de huesos o articulaciones (instrumentos o procedimientos quirúrgicos para el tratamiento de huesos o articulaciones, dispositivos especialmente adaptados al efecto A61B 17/56 ); Dispositivos para proporcionar los cuidados adecuados (vendajes, apósitos o compresas absorbentes A61F 13/00). › Dispositivos ortopédicos, p. ej. dispositivos para inmovilizar o para ejercer presiones de forma duradera para el tratamiento de los huesos fracturados o deformados, tales como férulas, yesos ortopédicos o bragueros/tirantes.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
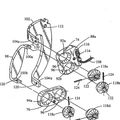
La presente invención se refiere a una articulación móvil que tiene hasta seis grados de libertad. Antecedentes de la invención Las articulaciones móviles complejas, tales como la articulación de la rodilla humana, permiten el movimiento relativo de dos partes con seis grados de libertad. Seis grados de libertad hacen referencia a un movimiento relativo a tres ejes opuestos de forma ortogonal, más la rotación alrededor de cada uno de esos tres ejes. Las articulaciones para la rodilla móviles propuestas con anterioridad que tienen más de un grado de libertad normalmente conectan dos partes mediante pasadores que pueden pivotar y que pueden moverse de forma angular en ranuras fijas. Tales articulaciones móviles de pasadorenranura no pueden simular el movimiento natural de las articulaciones humanas o animales con hasta seis grados de libertad. Además, la rigidez de las articulaciones móviles de pasadorenranura implica que no son capaces de absorber impactos, vibraciones y cargas aplicadas a las mismas. El documento US 5.086.760 describe una articulación móvil que tiene dos brazos articulados en un cuerpo construido con múltiples componentes. Existe por lo tanto una necesidad de una articulación móvil sencilla y de bajo coste que tiene hasta seis grados de libertad que es capaz de absorber impactos, vibraciones y cargas. Una articulación móvil de este tipo tiene muchos usos potenciales, por ejemplo, su uso en dispositivos de soporte de articulaciones humanas o animales. Sumario de la invención De acuerdo con la presente invención, se proporciona una articulación móvil caracterizada por un único cuerpo, dos aberturas separadas en el cuerpo, un orificio en el interior del cuerpo que interconecta las dos aberturas, dos brazos que tienen cada uno un extremo alojado de manera amovible en una de las dos aberturas, y un conector elástico alargado que se extiende a través del orificio con extremos opuestos que interconectan dichos extremos de los dos brazos. Preferiblemente, el cuerpo está hecho de plástico. El conector elástico puede incluir un núcleo de fibra pretensada sobremoldeado mediante un elemento elástico de plástico. El conector elástico puede tener una elasticidad seleccionada que, durante el uso, ejerce una influencia sobre el movimiento relativo de los dos brazos. La presente invención también proporciona una rodillera que incluye dos articulaciones móviles del tipo que se describe con anterioridad. La presente invención comprende además una tobillera que incluye dos articulaciones móviles del tipo que se describe con anterioridad. Breve descripción de los dibujos Se describirán realizaciones de la presente invención únicamente a modo de ejemplos no limitantes y con referencia a los dibujos adjuntos, en los que: la figura 1 es una vista en perspectiva en sección transversal parcial esquemática de una realización genérica de una articulación móvil de la presente invención; las figuras 2 a 4 son vistas en perspectiva en sección transversal parcial esquemática de la articulación móvil de la figura 1 en diversas posiciones de movimiento con hasta seis grados de libertad; las figuras 5 a 8 son vistas en perspectiva esquemática de realizaciones de un conector elástico de la articulación móvil de la presente invención; la figura 9 es una vista en perspectiva esquemática de una rodillera que incluye realizaciones de una articulación móvil de la presente invención; la figura 10 es una vista en perspectiva esquemática de una articulación móvil de la rodillera de la figura 9; las figuras 11 a 13 son vistas en sección parcial esquemática de realizaciones de la articulación móvil de la figura 10 que tienen diferentes geometrías internas; la figura 14 es una vista desde arriba esquemática de 2 una realización de la articulación móvil de la figura 10; y la figura 15 es una vista en perspectiva esquemática de una tobillera que incluye realizaciones de una articulación móvil de la presente invención. Descripción detallada de las realizaciones La figura 1 ilustra una realización genérica de una articulación móvil 100 de la presente invención. La articulación móvil 100 incluye un cuerpo 102 que tiene dos aberturas separadas 104, 106 conectadas mediante un orificio 108, tal como se representa en la sección transversal del cuerpo 102. Se hará variar el tamaño, la forma y la separación de las aberturas 104, 106 para cualquier aplicación concreta. Dos brazos 110, 112 tienen unos extremos que pueden alojarse en, y que al menos hacen tope parcialmente con, las aberturas 104, 106. El tamaño y la forma de los extremos que hacen tope de los brazos 110, 112 se hará variar para cualquier aplicación concreta. El cuerpo 102 y/o los brazos 110,112 pueden manufacturarse mediante, por ejemplo, moldeo por inyección. El cuerpo 102 y/o los brazos 110, 112 pueden manufacturarse a partir de, por ejemplo, materiales poliméricos, tales como poliuretanos, siliconas, polietilenos, nailon, poliésteres, y elastómeros de poliéster, y combinaciones de los mismos. Los materiales poliméricos pueden incluir refuerzos tales como tejido o fibras de vidrio, fibras de grafito, fibras de Kevlar (marca comercial) y fibras de Spheretex (marca comercial). Otros procedimientos de manufactura y materiales adecuados serán evidentes para los expertos en la técnica. Un conector elástico 114 que se ilustra en línea discontinua en la figura 1 pasa a través del orificio 108 y conecta los extremos de los brazos 110, 112 en las aberturas 104, 106. El conector elástico 114 está conectado de forma que puede liberarse a los extremos de los brazos 110, 112 mediante elementos de sujeción que pueden liberarse 116, 118, por ejemplo, tornillos. Durante el uso, la elasticidad del conector elástico 114 permite un movimiento independiente de los brazos 110, 112 con hasta seis grados de libertad que se controla mediante el enganche de partes de tope 120 de los brazos 110, 112 con unas partes de tope respectivas 122 de las aberturas 104, 106. En la figura 1, tres ejes ortogonales X, Y, Z proporcionan una dirección de referencia para cada uno de los seis grados de libertad de movimiento. Los seis grados de libertad de los brazos 110, 112 incluyen tres grados de traslación TX, TY, TZ y tres grados de rotación RX, RY, RZ. Las figuras 2 a 4 ilustran diversas posiciones a modo de ejemplo de los brazos 110, 112 en movimiento con seis grados de libertad. También durante el uso, la elasticidad del conector elástico 114 absorbe las fuerzas aplicadas a los brazos 110, 112 tales como impactos, vibraciones y cargas. Dependiendo de las características de elasticidad del conector elástico 114, las fuerzas y las cargas de tensión, de compresión y/o de torsión externas aplicadas a los brazos 110, 112 pueden amortiguarse, absorberse o resistirse. Las figuras 5 a 7 ilustran unas etapas en secuencia en la manufactura de una realización del conector elástico 114. La manufactura de esta realización se inicia con un ensamblaje integral de dos carretes separados 124, 126 conectados por un elemento de separación 128. El ensamblaje integral de los carretes 124, 126 y el elemento de separación 128 se coloca a continuación en una plantilla posicionadora (que no se muestra), y se forma un núcleo pretensado 130 enrollando fibra alrededor de y entre los carretes 124, 126 tanto de forma longitudinal como radial en relación con el elemento de separación 128; tal como se representa en la figura 6. Un elemento elástico 132 se moldea a continuación sobre los carretes 124, 126 y sobre el núcleo pretensado 130. Los carretes 124, 126 tienen unos orificios pasantes transversales para alojar los elementos de sujeción, para conectar el conector elástico 114 a los brazos 110, 112. Durante el uso, el núcleo pretensado 130 resiste las cargas de tensión aplicadas a los brazos 110, 112. Aparte de facilitar una manufactura sencilla, el elemento de separación 128 puede proporcionar un grado de rigidez en el conector elástico manufacturado 114. La figura 8 ilustra una realización alternativa del conector elástico 114. En esta realización, el núcleo pretensado 130 se forma atando fibra entre las partes internas de las dos conexiones de extremo 134, 136. El elemento elástico 132 se moldea a continuación sobre las partes internas de las conexiones de extremo 134, 136 y del núcleo pretensado 130. Las partes externas de las conexiones de extremo 134, 136 tienen unos orificios pasantes transversales para alojar los elementos de sujeción para conectar el conector elástico 114 a los brazos 110, 112. Los carretes 124, 126 y/o el elemento de separación 128 pueden hacerse mediante, por ejemplo, moldeo por inyección. Los carretes 124, 126 y/o el elemento de separación 128 pueden hacerse a partir de, por ejemplo, materiales poliméricos, tal como poliuretanos, siliconas, polietilenos, nailon, poliésteres, y elastómeros... [Seguir leyendo]
Reivindicaciones:
1. Una articulación móvil (100) caracterizada por un único cuerpo unitario (102), dos aberturas separadas (104, 106) en el cuerpo (102), un orificio (108) en el interior del cuerpo que interconecta las dos aberturas, dos brazos (110, 112) teniendo cada uno un extremo (120) alojado de manera amovible en una de las dos aberturas (104, 106), y un conector elástico alargado (114) que se extiende a través del orificio (108) con extremos opuestos que interconectan dicho extremo (120) de los dos brazos (110, 112). 2. Una articulación móvil de acuerdo con la reivindicación 1, en la que el cuerpo (102) está hecho de plástico. 3. Una articulación móvil de acuerdo con la reivindicación 1, en la que el conector elástico (114) comprende un núcleo de fibra pretensada (130) sobremoldeado mediante un elemento de plástico elástico (132). 4. Una articulación móvil de acuerdo con la reivindicación 1, en la que el conector elástico (114) tiene una elasticidad seleccionada que, durante el uso, ejerce una influencia sobre el movimiento relativo de los dos brazos (110, 112). 5. Una rodillera (200) que incluye dos articulaciones móviles (206a, 206b) de acuerdo con la reivindicación 1. 6. Una tobillera (300) que incluye dos articulaciones móviles (306a, 306b) de acuerdo con la reivindicación 1. 6 7 8 9 11 12 13 14
Patentes similares o relacionadas:
SOPORTE PARA ARTICULACIONES CORPORALES, CON ELEMENTOS DE FIJACION DE DESACOPLAMIENTO RAPIDO, del 2 de Noviembre de 2010, de ASTERISK.ASTERISK, LLC: Soporte anatómico posicionable exteriormente para estabilizar una articulación pivotante de unión dispuesta entre una primera estructura de extremidad y una […]
VENDAJE PARA ARTICULACIONES CON UN CONJUNTO DE PIVOTAMIENTO MULTIPLANAR, del 26 de Mayo de 2010, de ASTERISK.ASTERISK, LLC: Un vendaje anatómico posicionable exteriormente para estabilizar una articulación de unión dispuesta entre una primera estructura de un […]
ARTICULACION ORTESICA DE RODILLA, del 1 de Julio de 2007, de ASOCIACION INSTITUTO DE BIOMECANICA DE VALENCIA: Articulación ortésica de rodilla.#La presente invención se refiere a una articulación ortésica de rodilla, de entre las articulaciones en esta disposición […]
JUNTA GIRATORIA DE UN ACCESORIO PROTESICO DE ARTICULACION, del 26 de Julio de 2010, de HOKUSHINKAI MEDICAL CORPORATION: Junta giratoria de un accesorio protésico de articulación que presenta unos medios de ajuste de la carga giratoria, que comprende:
un elemento externo […]
SISTEMA ROBOTIZADO PORTATIL PARA REHABILITACION FUNCIONAL ASISTIDA DE ARTICULACIONES, del 31 de Julio de 2020, de Gogoa Mobility Robots, S.L: 1. Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de:
a) un actuador […]
SISTEMA ROBOTIZADO PORTÁTIL PARA LA REHABILITACIÓN FUNCIONAL ASISTIDA DE ARTICULACIONES, del 9 de Julio de 2020, de Gogoa Mobility Robots, S.L: Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de un actuador compuesto por […]
BOTA AJUSTABLE EN ANCHO Y LARGO, del 18 de Junio de 2020, de VIDCAPP ITHEF SL: Bota ajustable en largo y ancho que comprende: una pieza base anterior (BA), una pieza base posterior (BP), un lateral derecho (LR), un lateral izquierdo (LL), y un sistema […]
Ortesis para asegurar una articulación del hombro, del 17 de Junio de 2020, de BSN MEDICAL GMBH: Ortesis para inmovilizar una primera articulación del hombro de un paciente,
con una disposición de correa, que está adaptada para enganchar […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 SOPORTE PARA ARTICULACIONES CORPORALES, CON ELEMENTOS DE FIJACION DE DESACOPLAMIENTO RAPIDO, del 2 de Noviembre de 2010, de ASTERISK.ASTERISK, LLC: Soporte anatómico posicionable exteriormente para estabilizar una articulación pivotante de unión dispuesta entre una primera estructura de extremidad y una […]
SOPORTE PARA ARTICULACIONES CORPORALES, CON ELEMENTOS DE FIJACION DE DESACOPLAMIENTO RAPIDO, del 2 de Noviembre de 2010, de ASTERISK.ASTERISK, LLC: Soporte anatómico posicionable exteriormente para estabilizar una articulación pivotante de unión dispuesta entre una primera estructura de extremidad y una […]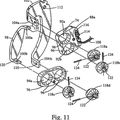 VENDAJE PARA ARTICULACIONES CON UN CONJUNTO DE PIVOTAMIENTO MULTIPLANAR, del 26 de Mayo de 2010, de ASTERISK.ASTERISK, LLC: Un vendaje anatómico posicionable exteriormente para estabilizar una articulación de unión dispuesta entre una primera estructura de un […]
VENDAJE PARA ARTICULACIONES CON UN CONJUNTO DE PIVOTAMIENTO MULTIPLANAR, del 26 de Mayo de 2010, de ASTERISK.ASTERISK, LLC: Un vendaje anatómico posicionable exteriormente para estabilizar una articulación de unión dispuesta entre una primera estructura de un […]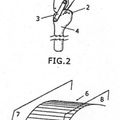 ARTICULACION ORTESICA DE RODILLA, del 1 de Julio de 2007, de ASOCIACION INSTITUTO DE BIOMECANICA DE VALENCIA: Articulación ortésica de rodilla.#La presente invención se refiere a una articulación ortésica de rodilla, de entre las articulaciones en esta disposición […]
ARTICULACION ORTESICA DE RODILLA, del 1 de Julio de 2007, de ASOCIACION INSTITUTO DE BIOMECANICA DE VALENCIA: Articulación ortésica de rodilla.#La presente invención se refiere a una articulación ortésica de rodilla, de entre las articulaciones en esta disposición […]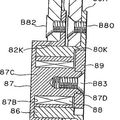 JUNTA GIRATORIA DE UN ACCESORIO PROTESICO DE ARTICULACION, del 26 de Julio de 2010, de HOKUSHINKAI MEDICAL CORPORATION: Junta giratoria de un accesorio protésico de articulación que presenta unos medios de ajuste de la carga giratoria, que comprende:
un elemento externo […]
JUNTA GIRATORIA DE UN ACCESORIO PROTESICO DE ARTICULACION, del 26 de Julio de 2010, de HOKUSHINKAI MEDICAL CORPORATION: Junta giratoria de un accesorio protésico de articulación que presenta unos medios de ajuste de la carga giratoria, que comprende:
un elemento externo […]