SISTEMA Y METODO PARA LA ASOCIACION DE DATOS DE DOMINIO DE MEDICION EN APLICACIONES DE LOCALIZACION COHERENTE PASIVA.
Método para asociar un informe de detección que tiene mediciones (306) con un seguimiento de línea,
en el que dicho informe de detección se correlaciona con una señal objetivo (130) transmitida desde una fuente (110, 112, 114) de oportunidad, reflejada desde un objetivo (150) y detectada por un sistema (100) de localización coherente pasiva, que comprende:
estimar (500), por medio de una función (308) de estimación de estado, un nuevo vector de estado de seguimiento de línea y actualizar los estados para extender los seguimientos de línea existentes a partir de dichas mediciones usando un conjunto de filtros de Kalman, en el que dichas mediciones se derivan al menos parcialmente comparando dicha señal (130) reflejada con una transmisión (140) de referencia a partir de dicha fuente (110, 112, 114) de oportunidad;
inicializar (800), por medio de una función (314) de inicialización de seguimiento de línea, dicho nuevo seguimiento de línea para un informe de detección no asociado;
fusionar (600), por medio de una función (310) de fusión de seguimiento de línea, dicho nuevo seguimiento de línea con otro seguimiento de línea asociado con dicho objetivo cuando se satisface un criterio de fusión;
terminar (700), por medio de una función (312) de terminación de seguimiento de línea, un seguimiento de línea caducado cuando se satisface un criterio de terminación, y
emitir (320), por medio de un bloque (320) de salida, dichos seguimientos de línea
Tipo: Resumen de patente/invención. Número de Solicitud: W0214067US.
Solicitante: LOCKHEED MARTIN CORPORATION.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 700 NORTH FREDERICK AVENUE,GAITHERSBURG, MD 20879.
Inventor/es: BENNER,ROBERT,H, SAWYER,JOSEPH.
Fecha de Publicación: .
Fecha Concesión Europea: 14 de Octubre de 2009.
Clasificación Internacional de Patentes:
- G01S13/00B
- G01S13/72B
Clasificación PCT:
- G01S13/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada.
Clasificación antigua:
- G01S13/00 G01S […] › Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada.
Fragmento de la descripción:
Sistema y método para la asociación de datos de dominio de medición en aplicaciones de localización coherente pasiva.
Antecedentes de la invención
La presente invención se refiere a un método y sistema de radar de localización coherente pasiva ("PCL" - "passive coherent location"), y más particularmente, a un sistema y método para la asociación de datos de dominio de medición, también denominado seguimiento de línea, para aplicaciones de radar de PCL.
Los sistemas de radar de PCL pueden representarse mediante un sistema de radar multiestático. Un sistema de radar multiestático tiene muchos receptores que están separados de uno o más transmisores. La señal radiada desde un transmisor llega a un receptor a través de dos trayectorias separadas. Una trayectoria puede ser una trayectoria directa desde el transmisor hasta el receptor, y la otra trayectoria puede ser una trayectoria objetivo que incluye una trayectoria indirecta desde el transmisor hasta un objetivo hasta el receptor. Las mediciones pueden incluir una longitud de trayectoria total, o tiempo de tránsito, de la señal de trayectoria objetivo, el ángulo de llegada de la señal de trayectoria objetivo y la frecuencia de las señales de trayectoria objetivo y directa. Puede detectarse una diferencia en la frecuencia según un efecto Doppler si el objetivo está en movimiento.
El conocimiento de la señal transmitida es deseable en el receptor si debe extraerse información a partir de la señal de trayectoria objetivo. Se desea la frecuencia transmitida para determinar el desplazamiento de frecuencia Doppler. También se desea una referencia de fase o de tiempo si debe determinarse la longitud de trayectoria dispersada total. La referencia de frecuencia puede obtenerse a partir de la señal directa. La referencia de tiempo también puede obtenerse a partir la señal directa siempre que se conozca la distancia entre el transmisor y el receptor.
Los sistemas de radar multiestáticos pueden ser capaces de determinar la presencia de un objetivo dentro de la cobertura del radar, la ubicación de la posición del objetivo y una componente de velocidad, o efecto Doppler, con respecto al radar. El procedimiento de localización de la posición del objetivo puede incluir una medición de una distancia y el ángulo de llegada. La determinación de medición de la distancia con respecto al sitio de recepción puede requerir tanto el ángulo de llegada en el sitio de recepción como la distancia entre transmisor y receptor. Si la señal directa está disponible, puede usarse como señal de referencia para extraer el desplazamiento de frecuencia Doppler.
En sistemas de radar PCL, los transmisores pueden conocerse como iluminadores. Los iluminadores pueden ser fuentes de oportunidades de banda ancha que incluyen transmisores y/o repetidores de radiodifusión de frecuencia modulada ("FM") comerciales, transmisores y/o repetidores de radiodifusión de televisión de alta definición ("HDTV") comerciales, y similares. Existen técnicas eficaces para el procesamiento previo a la detección de señales de banda ancha y la mitigación de interferencias en el mismo canal. Enfoques conocidos incluyen una red de antenas usadas para recibir la fuente de oportunidad que va a aprovecharse, tal como el iluminador primario, y cualquier otra señal en el mismo canal presente en el entorno.
Las diferentes señales y sus datos de medición deben asociarse con el objetivo apropiado. Si no existe la asociación con el objetivo, entonces puede tener que implementarse un nuevo seguimiento para el objetivo. Por el contrario, deben eliminarse seguimientos antiguos del sistema si ya no se reciben actualizaciones. Una asociación de datos de medición más eficaz y conveniente puede mejorar el seguimiento del objetivo en sistemas de PCL.
El documento de HOWLAND P. E.: "TARGET TRACKING USING TELEVISION-BASED BISTATIC RADAR" IEE PROCEEDINGS: RADAR, SONAR & NAVIGATION, INSTITUTION OF ELECTRICAL ENGINEERS, GB, vol. 146, n.º 3, junio de 1999, páginas 166-174, XP000847804 ISSN: 1350-2395, se refiere a un transmisor de televisión no cooperativo como el iluminador para un sistema de radar biestático que permite detectar y realizar un seguimiento de objetivos aerotransportados usando sólo la portadora de imágenes o sonido de la radiodifusión de televisión.
El documento US 5.798.942 se refiere a un sistema de seguimiento de múltiples objetivos de N mejores hipótesis viables para detectar y realizar un seguimiento con precisión de un gran número de objetos poco separados en un entorno de objetivo denso en tiempo real.
Sumario de la invención
En consecuencia, la presente invención se refiere a aplicaciones de PCL y procesamiento de señal, y se define por las reivindicaciones adjuntas.
En la descripción siguiente se expondrán características y ventajas adicionales de la invención, y en parte resultarán evidentes a partir de la descripción, o pueden aprenderse mediante la práctica de la invención. Los objetivos y otras ventajas de la invención se realizarán y obtendrán mediante la estructura indicada particularmente en la descripción escrita y las reivindicaciones de la misma así como en los dibujos adjuntos.
Debe entenderse que tanto la descripción general anterior como la siguiente descripción detallada son a modo de ejemplo y explicativo y se pretende que proporcionen una explicación adicional de la invención según se reivindica.
Breve descripción de los dibujos
Los dibujos adjuntos, que se incluyen para proporcionar un entendimiento adicional de la invención y se incorporan en y constituyen parte de esta memoria descriptiva, ilustran realizaciones de la presente invención y junto con la descripción sirven para explicar los principios de la invención. En los dibujos:
la figura 1 ilustra un diagrama de bloques de un sistema de radar, un objetivo y transmisores según una realización de la presente invención;
la figura 2 ilustra un diagrama de bloques de un sistema de localización coherente pasiva según una realización de la presente invención;
la figura 3 ilustra un diagrama de bloques de un subsistema de procesamiento de seguimiento de línea para la asociación de datos de dominio de medición según una realización de la presente invención;
la figura 4 ilustra un diagrama de flujo para procesar seguimientos de línea según una realización de la presente invención;
la figura 5A ilustra un diagrama de flujo para estimar estados de seguimiento de línea según una realización de la presente invención;
la figura 5B ilustra un diagrama de flujo para la asociación de detección al estimar estados de seguimiento de línea según una realización de la presente invención;
la figura 6 ilustra un diagrama de flujo para fusionar seguimientos de línea según una realización de la presente invención;
la figura 7 ilustra un diagrama de flujo para terminar seguimientos de línea según una realización de la presente invención;
la figura 8A ilustra un diagrama de flujo para inicializar seguimientos de línea según una realización de la presente invención;
la figura 8B ilustra un diagrama de flujo para inicializar seguimientos de línea con un procedimiento de detección automática según una realización de la presente invención; y
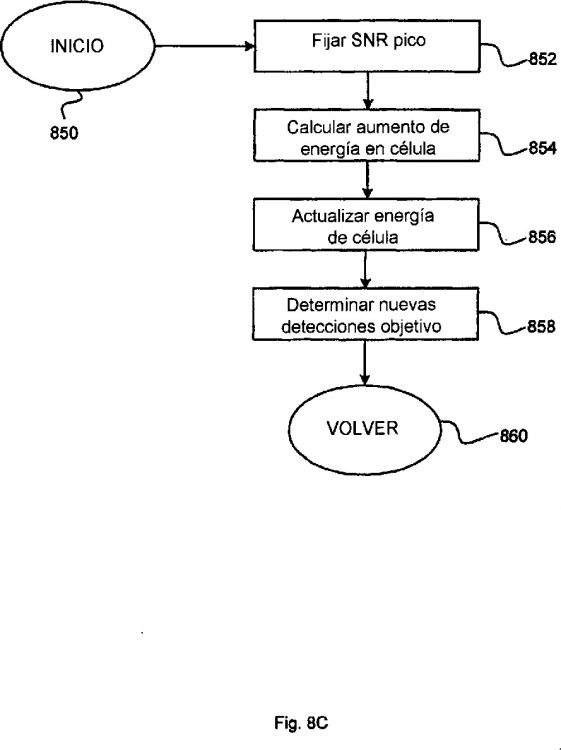
la figura 8C ilustra un diagrama de flujo para realizar operaciones de célula con células en las rejillas de detección automática según una realización de la presente invención.
Descripción detallada de las realizaciones preferidas
Ahora se hará referencia con detalle a las realizaciones preferidas de la presente invención, cuyos ejemplos se ilustran en los dibujos adjuntos.
La figura 1 representa un diagrama de bloques de un sistema de radar, un objetivo y transmisores según una realización de la presente invención. El sistema 10 de detección de radar incluye un sistema 100 de PCL, uno o más objetivos 150 de interés y una pluralidad de transmisores 110, 112 y 114. El sistema 100 de PCL representa una familia de sensores de vigilancia de objetivo de área amplia multiestáticos. El sistema 100 de PCL aprovecha la energía electromagnética de onda continua ("OC"), a menudo a partir de fuentes de oportunidad que pueden funcionar para otros fines. Las fuentes de oportunidad pueden incluir estaciones de radiodifusión de televisión...
Reivindicaciones:
1. Método para asociar un informe de detección que tiene mediciones (306) con un seguimiento de línea, en el que dicho informe de detección se correlaciona con una señal objetivo (130) transmitida desde una fuente (110, 112, 114) de oportunidad, reflejada desde un objetivo (150) y detectada por un sistema (100) de localización coherente pasiva, que comprende:
2. Método según la reivindicación 1, que comprende además seleccionar (506, 508) dicho conjunto de filtros de Kalman.
3. Método según la reivindicación 1, en el que dicho conjunto de filtros de Kalman incluye filtros de Kalman de alcance y ángulo de llegada.
4. Método según la reivindicación 1, en el que dicho conjunto de filtros de Kalman incluye filtros de Kalman de frecuencia y ángulo de llegada.
5. Método según la reivindicación 1, en el que dicha estimación incluye propagar (510) estimaciones de estado para dicho seguimiento de línea.
6. Método según la reivindicación 1, que comprende además determinar (504) si dicha señal es una señal FM.
7. Método según la reivindicación 1, que comprende además determinar (504) si dicha señal es una señal de TV.
8. Método según la reivindicación 7, que comprende además realizar (900) un seguimiento de una portadora de dicha señal de TV.
9. Método según la reivindicación 1, que comprende además actualizar (514) los estados de filtro de dichos filtros de Kalman.
10. Método según la reivindicación 1, en el que la etapa de estimar (500) comprende:
11. Método según la reivindicación 10, que comprende además inicializar (800) estados de filtro de seguimiento de línea de dicho seguimiento de línea.
12. Método según la reivindicación 10, que comprende además determinar (608) dicho criterio de fusión según dichos errores residuales.
13. Método según la reivindicación 10, que comprende además determinar (704) dicho criterio de terminación.
14. Subsistema (300) de procesamiento de seguimiento de línea incluido dentro de un sistema (100) de localización coherente pasiva, en el que dicho subsistema (300) de procesamiento de seguimiento de línea está dispuesto para asociar informes (306) de detección con un seguimiento de línea, en el que dichos informes de detección se correlacionan con señales objetivo transmitidas desde una fuente (110,112, 114) de oportunidad, reflejadas desde un objetivo (150) y recibidas en dicho sistema (100) de localización coherente pasiva, que comprende:
15. Sistema según la reivindicación 14, en el que dichos medios de estimación de estado reciben un bloque de entrada que comprende dichos informes de detección.
16. Sistema según la reivindicación 15, en el que dichos informes de detección comprenden mediciones.
17. Sistema según la reivindicación 16, en el que dichos informes de detección comprenden varianzas para dichas mediciones.
18. Sistema según la reivindicación 16, en el que dichas mediciones se usan por dichos medios de estimación de estado al asociar dichos informes de detección.
19. Sistema según la reivindicación 14, en el que dichos medios de estimación de estado incluyen filtros de Kalman para alcance, frecuencia y ángulo de llegada.
20. Sistema según la reivindicación 14, en el que dicho bloque de salida comprende registros de seguimiento de línea.
21. Sistema según la reivindicación 14, en el que dicho bloque de salida comprende mediciones.
Patentes similares o relacionadas:
MÉTODO Y SISTEMA DE ALTIMETRÍA, del 4 de Noviembre de 2011, de AGENCE SPATIALE EUROPEENNE: Un método de altimetría para determinar un perfil de elevación de una porción de la superficie de la tierra (ES), que comprende las etapas de: […]
MÉTODO PARA DETERMINAR POSICIONES DE OBJETIVOS POR MEDICIONES BIESTÁTICAS UTILIZANDO SEÑALES DISPERSADAS POR LOS OBJETIVOS, del 29 de Junio de 2011, de TOTALFORSVARETS FORSKNINGSINSTITUT: Un método para determinar las posiciones de objetivos en un espacio de posiciones utilizando señales dispersadas por los objetivos, que comprende […]
 DISPOSITIVO RADIOELÉCTRICO BIESTÁTICO PARA REALIZAR UNA BARRERA DE DETECCIÓN DE INTRUSIONES, del 23 de Febrero de 2011, de THALES: Barrera de detección radioeléctrica biestática que comprende medios para emitir al menos una onda a través de una antena direccional […]
DISPOSITIVO RADIOELÉCTRICO BIESTÁTICO PARA REALIZAR UNA BARRERA DE DETECCIÓN DE INTRUSIONES, del 23 de Febrero de 2011, de THALES: Barrera de detección radioeléctrica biestática que comprende medios para emitir al menos una onda a través de una antena direccional […]
 PROCEDIMIENTO DE DETECCION Y LOCALIZACION MULTIESTATICA DE UN INGENIO MEDIANTE LA UTILIZACION DE EMISORES DE DIFUSION DIGITALES, del 24 de Mayo de 2010, de THALES: Procedimiento para detectar y/o localizar un ingenio móvil en un sistema de recepción que explota emisores de oportunidad cuya señal comprende elementos que […]
PROCEDIMIENTO DE DETECCION Y LOCALIZACION MULTIESTATICA DE UN INGENIO MEDIANTE LA UTILIZACION DE EMISORES DE DIFUSION DIGITALES, del 24 de Mayo de 2010, de THALES: Procedimiento para detectar y/o localizar un ingenio móvil en un sistema de recepción que explota emisores de oportunidad cuya señal comprende elementos que […]
 PROCEDIMIENTO DE LOCALIZACION DE UN OBJETO MOVIL A PARTIR DE MEDICIONES DE DISTANCIA Y DE VELOCIDAD BIESTATICAS DE ESTE OBJETO CON LA AYUDA DE UN SISTEMA MULTIESTATICO, del 1 de Diciembre de 2009, de THALES: Procedimiento de localización de un objeto móvil a partir de mediciones de distancia y de velocidad biestáticas de este objeto con la ayuda de un sistema multiestático, caracterizado […]
PROCEDIMIENTO DE LOCALIZACION DE UN OBJETO MOVIL A PARTIR DE MEDICIONES DE DISTANCIA Y DE VELOCIDAD BIESTATICAS DE ESTE OBJETO CON LA AYUDA DE UN SISTEMA MULTIESTATICO, del 1 de Diciembre de 2009, de THALES: Procedimiento de localización de un objeto móvil a partir de mediciones de distancia y de velocidad biestáticas de este objeto con la ayuda de un sistema multiestático, caracterizado […]
Método de funcionamiento de un radar pasivo, del 10 de Junio de 2020, de HENSOLDT Sensors GmbH: Un método de funcionamiento de un radar pasivo, que comprende una unidad receptora para recibir una señal reflejada en un objetivo del radar […]
Sistema de radar, del 20 de Mayo de 2020, de Fincantieri S.p.A: Un sistema de radar , que comprende: - una antena de transmisión que comprende una pluralidad de conjuntos lineales (t1-t4) de elementos […]
Método para determinar información de tipo geométrico en dispositivos de redes en la banda de ondas milimétricas, del 27 de Septiembre de 2019, de FUNDACION IMDEA NETWORKS: Método para determinar información de tipo geométrico en dispositivos de redes en la banda de ondas milimétricas. Un método para determinar información geométrica de […]