SISTEMA PARA REALIZAR ENSAYOS EN VEHICULOS INTELIGENTES DE CARRETERA.
Sistema para llevar a cabo investigaciones sobre un vehículo que puede ser conducido (4,
31) o sobre un componente del mismo que tiene un sistema inteligente que comprende, por lo menos, un sensor, un dispositivo de accionamiento y un ordenador a bordo, estando caracterizado dicho sistema por:
- un puesto de ensayo (1, 34) sobre el cual el vehículo (4, 31) o el componente pueden estar situados en una posición estacionaria o de simulación de la conducción, cuyo vehículo (4, 31) o cuyo componente está dotado, por lo menos, de un sensor (21, 40) para recibir señales del entorno de dicho vehículo (4, 31) o de dicho componente, - por lo menos, un objeto (2, 27) que está situado en las proximidades del puesto de ensayo (1, 34), - medios (11, 30) para generar un movimiento relativo entre el puesto de ensayo (1, 34) y, por lo menos, un objeto (2, 27), y - un ordenador de control para coordinar el movimiento relativo entre el puesto de ensayo (1, 34) y el objeto (2, 27)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/NL01/00468.
Solicitante: NEDERLANDSE ORGANISATIE VOOR TOEGEPAST-NATUURWETENSCHAPPELIJK ONDERZOEK TNO.
Nacionalidad solicitante: Países Bajos.
Dirección: SCHOEMAKERSTRAAT 97, P.O. BOX 60680,2628 VK.
Inventor/es: VAN DER KNAAP, ALBERTUS, CLEMENS, MARIA, KUSTERS,LEONARDUS,JOHANNES,JOSEF, KLEUSKENS,RALPH,JACQUES,ANTOINE, VERBURG,DIRK,JAN.
Fecha de Publicación: .
Fecha Concesión Europea: 25 de Noviembre de 2009.
Clasificación Internacional de Patentes:
- G01M17/007B
Clasificación PCT:
- G01M17/007 FISICA. › G01 METROLOGIA; ENSAYOS. › G01M ENSAYO DEL EQUILIBRADO ESTATICO O DINAMICO DE MAQUINAS O ESTRUCTURAS; ENSAYO DE ESTRUCTURAS O APARATOS, NO PREVISTOS EN OTRO LUGAR. › G01M 17/00 Ensayos de vehículos (ensayos de estanqueidad G01M 3/00; ensayos de las propiedades elásticas de carcasas o chasis, p. ej. ensayos de torsión G01M 5/00; ensayos de alineación de los dispositivos de iluminación delantera de vehículos G01M 11/06; ensayos de motores G01M 15/00). › Vehículos de ruedas o vehículos oruga (G01M 17/08 tiene prioridad).
Clasificación antigua:
- G01M17/007 G01M 17/00 […] › Vehículos de ruedas o vehículos oruga (G01M 17/08 tiene prioridad).
Fragmento de la descripción:
Sistema para realizar ensayos en vehículos inteligentes de carretera.
La invención se refiere a llevar a cabo investigaciones en un vehículo de carretera en relación con su entorno. Un vehículo de carretera, tal como un automóvil de pasajeros o un camión, está casi siempre en un entorno en el que se encuentran también otros vehículos de carretera. Debe tenerse en cuenta, por ejemplo, la conducción en columnas o similares. Como es conocido, en este contexto existen problemas crecientes con respecto a la demanda cada vez mayor de movilidad, al número creciente de vehículos y a la relativa falta de capacidad de las carreteras. Los retrasos resultantes en el transporte de personas y de mercancías producen pérdidas económicas considerables y llevan a muchos otros efectos no deseables, tales como situaciones de ansia, retrasos en las citas y similares.
Por otra parte, las infraestructuras locales y los requisitos medioambientales limitan el crecimiento de la red de carreteras. Debido a estos motivos, existe la necesidad de investigar una utilización más eficiente y más intensiva de la red de carreteras existente. En este contexto, debe considerarse el incremento de la capacidad de esta red, permitiendo que los vehículos fluyan de una manera más uniforme y a distancias más cortas uno del otro, por ejemplo, en columnas o convoyes (agrupamientos
).
Solamente puede conseguirse con seguridad una mejora del flujo de este tipo, si los vehículos y la red de carreteras están conectados por medio de sistemas inteligentes. Dichos sistemas pueden comprender ordenadores a bordo de los vehículos, dispositivos de accionamiento para regular la velocidad y la dirección, sensores y posiblemente sistemas de comunicación.
Como ejemplos de dichos sistemas que pueden ser mencionados puede incluirse el control activo del desplazamiento
, es decir, un sistema en el que no sólo puede mantenerse una velocidad específica predeterminada, sino asimismo una distancia específica con respecto al vehículo de delante. Con un sistema de este tipo, es posible utilizar un radar para medir la distancia a la que un vehículo está siguiendo al vehículo de delante, y esta distancia puede ser utilizada para asumir la responsabilidad de las funciones del conductor por medio de una intervención automática en el accionamiento del freno y del acelerador.
Cuando se desarrollan sistemas inteligentes para vehículos de carretera, se atribuye un papel importante a las técnicas de simulación. Sin embargo, dichos sistemas y vehículos necesitan ser ensayados y analizados de forma exhaustiva antes de que se pueda conseguir una puesta en práctica segura y fiable.
Hasta la fecha se han producido diversos intentos a este respecto. En primer lugar, puede intentarse utilizar una simulación mediante ordenador para llevar a cabo un análisis en base a un modelo real. Una simulación de este tipo es económica, pero la fiabilidad de los resultados depende en gran parte del modelo utilizado. Además, solamente puede otorgarse relevancia a dicho modelo después de una validación exhaustiva. No obstante, se requiere una gran atención cuando se desarrollan nuevos sistemas, dado que fenómenos desconocidos (tales como faltas de linealidad, grados de libertad insuficientes) pueden tener un efecto considerable en la fiabilidad del modelo.
Una segunda posibilidad para el ensayo de sistemas inteligentes se refiere a la utilización de prototipos completos. La ventaja de esto es que están presentes todos los componentes a investigar y asimismo todos los efectos físicos. No obstante, los costes elevados y la complejidad representan inconvenientes. La reproducibilidad de dichos ensayos con prototipos completos significa también un problema. Los ensayos son perturbados a menudo por condiciones incontrolables del entorno tales como viento, lluvia, estado de la superficie de la carretera y similares. Las deficiencias en el propio prototipo pueden originar asimismo problemas. Por otra parte, los riesgos asociados a dichos ensayos son relativamente grandes. Por ejemplo, en los ensayos que se refieren a distancias cortas entre vehículos pueden producirse colisiones que ocasionan peligros para el personal del ensayo y pueden producir daños a los costosos prototipos.
Según una tercera posibilidad, los ensayos en componentes o en subsistemas pueden ser llevados a cabo en un puesto de ensayo. Sin embargo, un problema relacionado con los sistemas estacionarios de este tipo es que no es posible simular de manera adecuada el funcionamiento de los sensores. Después de todo, el funcionamiento correcto de los sensores y de las operaciones de control asociadas solamente puede ser investigado si se realizan movimientos relativos, tales como los conocidos a partir del documento WO 99/39173 que da a conocer un aparato y un método para ensayar, por lo menos, un sensor y el sistema electrónico de control asociado utilizado en un sistema de limitación de la seguridad de un vehículo, comprendiendo dicho aparato un puesto de ensayo en el que está situado un sensor para recibir señales del entorno y un objeto que es móvil en la dirección de dicho puesto de ensayo mediante un carro montado sobre un sistema de raíles.
Por consiguiente, el objetivo de la invención es hacer posible llevar a cabo una investigación realista sobre un vehículo móvil de carretera sin implicar riesgos y costes muy elevados. Este objetivo se alcanza por medio de un sistema para llevar a cabo una investigación en un vehículo móvil o en un componente del mismo, que tiene un sistema inteligente que comprende, por lo menos, un sensor, un dispositivo de accionamiento y un ordenador a bordo, estando caracterizado dicho sistema por:
En el sistema según la invención es posible, dependiendo del tipo de investigación, utilizar un vehículo completo o un componente del mismo. La ventaja de esto es que es posible tener en cuenta todos los fenómenos que surgen durante la utilización de un vehículo de este tipo en la práctica. Por otra parte, el vehículo está dispuesto en una posición (casi) estacionaria en el puesto de ensayo, de modo que es posible evitar los riesgos producidos por las velocidades elevadas y similares. Sin embargo, como alternativa, el objeto podría ser asimismo estacionario.
El sistema inteligente del vehículo puede ser ensayado de una manera fiable y realista dado que el entorno con objetos asociados puede ejecutar ahora un movimiento generado por el ordenador de control con respecto al vehículo en el puesto de ensayo. En otras palabras, las velocidades absolutas del vehículo y del objeto u objetos quedan reducidas drásticamente. En el caso del vehículo, incluso es posible reducir a cero lo más importante, la velocidad hacia adelante. La energía cinética asociada y el espacio necesario pueden, por consiguiente, estar limitados a un mínimo. Solamente se realizan diferentes movimientos y a diferentes velocidades. Por consiguiente, el sistema puede estar situado en una zona cubierta sin ningún problema, con el resultado de que las condiciones ambientales, tales como temperatura, viento, humedad y similares, pueden estar controladas y puede garantizarse la reproducibilidad del ensayo.
A pesar del hecho de que en el puesto de ensayo el vehículo no puede realizar movimientos hacia adelante o hacia atrás, es posible realizar otros movimientos. Los ejemplos mencionados son movimientos laterales o transversales, giros de viraje, giros de inclinación y giros de rotación (es decir, giros alrededor del eje vertical, del eje transversal y del eje longitudinal del vehículo). Además, pueden simularse todos los demás fenómenos asociados con el movimiento longitudinal si el vehículo está situado sobre un puesto de ensayo sobre rodillos o sobre un puesto de ensayo con cintas sin fin que interactúan, por lo menos, con las ruedas motrices del vehículo. En este caso, puede simularse la influencia de la masa del vehículo,...
Reivindicaciones:
1. Sistema para llevar a cabo investigaciones sobre un vehículo que puede ser conducido (4, 31) o sobre un componente del mismo que tiene un sistema inteligente que comprende, por lo menos, un sensor, un dispositivo de accionamiento y un ordenador a bordo, estando caracterizado dicho sistema por:
2. Sistema, según la reivindicación 1, en el que la coordinación del movimiento relativo entre el puesto de ensayo (1, 34) y el objeto (2, 27) tiene lugar en base, por lo menos, a un punto instantáneo de información referente al estado del vehículo o del componente, y/o en base a las señales recibidas por el sensor (21, 40).
3. Sistema, según la reivindicación 1 ó 2, en el que el ordenador de control contiene un programa que simula, por lo menos, parte del estado real del vehículo o del componente que falta, en el estado en que el vehículo (4, 31) o el objeto están situados en el puesto de ensayo (1, 34).
4. Sistema, según la reivindicación 3, en el que la coordinación del movimiento relativo entre el puesto de ensayo (1, 34) y el objeto (2, 27) es llevada a cabo parcialmente en base a la simulación del estado real del vehículo (4, 31) o del componente, que está creado por medio del ordenador de control.
5. Sistema, según una de las reivindicaciones anteriores, en el que el puesto de ensayo (1, 34) comprende un puesto con rodillos (33) o un puesto (5) con cintas sin fin (6) para su interacción, por lo menos, con las ruedas motrices (3) del vehículo (4).
6. Sistema, según la reivindicación 5, en el que el puesto de ensayo (1) comprende un soporte que permite que el vehículo (4) gire alrededor de un eje transversal (9) (eje de inclinación).
7. Sistema, según las reivindicaciones 5 y 6, en el que el puesto de ensayo (1) comprende un soporte que permite que el vehículo (4) gire alrededor de un eje vertical (eje de viraje).
8. Sistema, según una de las reivindicaciones 5, 6 y 7, en el que el puesto de ensayo (1) comprende un soporte que permite que el vehículo gire alrededor de un eje longitudinal (eje de giro).
9. Sistema, según una de las reivindicaciones 5, 6, 7 y 8, en el que el puesto de ensayo (1) puede ser desplazado lateralmente mediante medios de accionamiento especiales (11).
10. Sistema, según una de las reivindicaciones 5 a 9, en el que el puesto de ensayo (1) está unido mediante una superficie de conducción (10, 15, 16), y el objeto (22) puede desplazarse sobre dicha superficie de conducción.
11. Sistema, según las reivindicaciones 9 y 10, en el que el puesto de ensayo (11) puede desplazarse sobre una guía lateral lineal (8), y una superficie de conducción (10) que puede ser desplazada longitudinalmente de forma independiente de dicho puesto de ensayo (1) está situada, por lo menos, en un lado longitudinal del puesto de ensayo (1).
12. Sistema, según la reivindicación 9, en el que una superficie fija de conducción (10, 15, 16) está situada en los lados delantero y posterior del puesto de ensayo (1).
13. Sistema, según la reivindicación 11 ó 12, en el que una superficie de conducción (10, 15, 16) que puede ser desplazada de forma independiente del puesto de ensayo (1) está situada en uno de los lados del puesto de ensayo (1).
14. Sistema, según una de las reivindicaciones 9 a 13, en el que el puesto de ensayo (1) y cada una de las superficies de conducción desplazables (10) están alojados en un carro específico (8, 9).
15. Sistema, según una de las reivindicaciones anteriores 5 a 14, en el que el objeto comprende un carro inferior (2) que esta dotado de ruedas, de las cuales por lo menos una, puede ser de dirección.
16. Sistema, según la reivindicación 15, en el que el carro inferior (2) tiene, por lo menos, tres ruedas y, por lo menos, una de las ruedas puede ser de dirección.
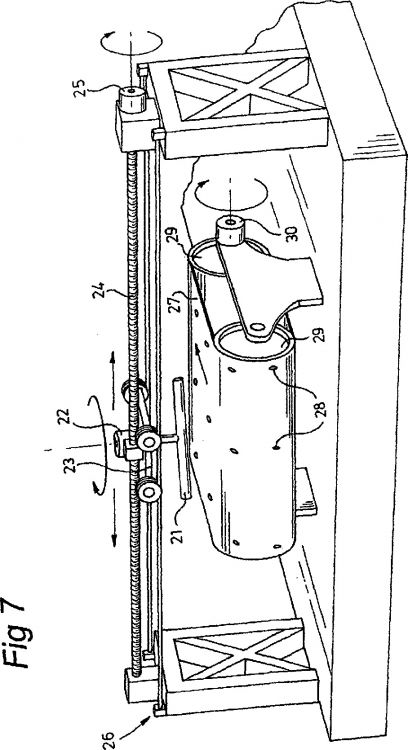
17. Sistema, según una de las reivindicaciones 1 a 5, en el que el objeto está diseñado como un elemento giratorio sin fin (27), tal como una cinta, dotada de puntos de medición (28), y el sensor (21) está situado en las proximidades de una superficie de dicho elemento giratorio (27) y puede ser desplazado en dirección transversal a lo largo de una superficie de dicho elemento (27).
18. Sistema, según la reivindicación 17, en el que el elemento giratorio comprende una cinta (27) que está enrollada alrededor de dos rodillos paralelos (29, 30).
19. Sistema, según la reivindicación 17 ó 18, en el que el sensor comprende una antena (21) la cual, a una cierta distancia de una parte de la cinta (27), está suspendida de una guía lineal (24, 25) que se extiende en sentido transversal por encima de la cinta.
20. Sistema, según la reivindicación 19, en el que la antena (21) puede girar en un plano que es paralelo a dicha parte de la cinta.
21. Sistema, según una de las reivindicaciones anteriores, en el que está dispuesto un sensor de velocidad.
22. Sistema, según una de las reivindicaciones anteriores, en el que está dispuesto un sensor de aceleración.
23. Sistema, según una de las reivindicaciones anteriores, en el que está dispuesto un sensor de inclinación.
24. En una combinación, un sistema según una de las reivindicaciones 1 a 23, que comprende:
25. Combinación, según la reivindicación 24, que comprende:
26. Combinación, según una de las reivindicaciones anteriores, en la que el dispositivo de accionamiento está conectado al sistema de gestión del motor.
27. Combinación, según una de las reivindicaciones anteriores, en la que el dispositivo de accionamiento está conectado al dispositivo de frenado.
28. Combinación, según una de las reivindicaciones anteriores, en la que el dispositivo de accionamiento (19) está conectado al sistema de dirección.
29. Combinación, según una de las reivindicaciones anteriores 24 a 28, en la que el vehículo está dotado de un ordenador a bordo, cuyo ordenador a bordo está conectado al ordenador de control.
30. Combinación, según una de las reivindicaciones 24 a 29, en la que el vehículo está dotado de un sistema de comunicaciones para transmitir información relativa al entorno del vehículo, tal como la presencia de otros vehículos (cola).
31. Método para llevar a cabo una investigación en un vehículo que puede ser conducido (4, 31), o de un componente del mismo que tiene un sistema inteligente que comprende, por lo menos, un sensor, un dispositivo de accionamiento y un ordenador a bordo, por medio de la combinación según una de las reivindicaciones 24 a 30, que comprende:
comprendiendo las etapas de:
32. Método, según la reivindicación 31, que implica el funcionamiento de un vehículo o de un componente que está dotado de:
33. Método, según la reivindicación 32, en el que el cambio físico está ocasionado para hacer que, por lo menos, un objeto (2) se mueva.
34. Método, según la reivindicación 33, en el que, por lo menos, un objeto (2) se mueve con una velocidad, aceleración y/o dirección predeterminadas.
35. Método, según las reivindicaciones 31, 32, 33 ó 34, para llevar a cabo una investigación del comportamiento del vehículo en el adelantamiento, utilizando un sistema según una de las reivindicaciones 9 a 16, en el que el vehículo (4) puede ser desplazado en sentido transversal con respecto a la dirección longitudinal del vehículo en el puesto de ensayo (1), comprendiendo las etapas de:
36. Método, según la reivindicación 31, 32, 33 ó 34, para llevar a cabo investigación en un vehículo (31) que está guiado sobre una cuadrícula, utilizando un sistema según una de las reivindicaciones 17 a 20, en el que el objeto está diseñado como un elemento giratorio sin fin (27), tal como una cinta, dotada de puntos de medición (28), y en que el sensor (21) está situado en las proximidades de una superficie de dicho elemento giratorio (27) y puede ser desplazado en la dirección transversal a lo largo de una superficie de dicho elemento, comprendiendo las etapas de:
37. Método, según la reivindicación 32, que implica el funcionamiento de un vehículo (4) que está dotado de un dispositivo de accionamiento (19) el cual está conectado al dispositivo de dirección del vehículo (4), comprendiendo la etapa de influir en el dispositivo de accionamiento (19) por medio del ordenador de control con el objeto de llevar a cabo los movimientos correctivos del dispositivo de dirección de tal modo que la carga mecánica y los movimientos del dispositivo de dirección corresponden a un movimiento predeterminado del vehículo, tal como una maniobra de adelantamiento.
Patentes similares o relacionadas:
SISTEMA Y MÉTODO PARA PROBAR UN VEHÍCULO, del 22 de Diciembre de 2011, de NEDERLANDSE ORGANISATIE VOOR TOEGEPAST-NATUURWETENSCHAPPELIJK ONDERZOEK TNO: Sistema de prueba para probar sistemas de vehículo que comprenden por lo menos un detector , comprendiendo el sistema de prueba: - un banco de pruebas […]
 SISTEMA PARA SIMULAR EL EFECTO SUELO PARA SOMETER A PRUEBA VEHICULOS O SUS MODELOS SIMULADOS EN TUNELES DE VIENTO, del 27 de Septiembre de 2010, de PININFARINA S.P.A.: Sistema para simular el efecto suelo para someter a prueba vehículos o sus modelos simulados en túneles de viento, que comprende:
- una superficie de apoyo para el […]
SISTEMA PARA SIMULAR EL EFECTO SUELO PARA SOMETER A PRUEBA VEHICULOS O SUS MODELOS SIMULADOS EN TUNELES DE VIENTO, del 27 de Septiembre de 2010, de PININFARINA S.P.A.: Sistema para simular el efecto suelo para someter a prueba vehículos o sus modelos simulados en túneles de viento, que comprende:
- una superficie de apoyo para el […]
Dispositivo de ensayo, del 6 de Mayo de 2020, de Saginomiya Seisakusho, Inc: Dispositivo de ensayo según la operación de conducción del operario para simular el estado de conducción, que comprende: una placa […]
Disposición de transductor de desplazamiento así como maniquí para ensayos de choque, del 8 de Abril de 2020, de Pfeifer, Gerhard: Disposición de transductor de desplazamiento para la medición de intrusiones en un maniquí para ensayos de choque, con una primera suspensión y una […]
Dispositivo de ensayo, del 26 de Febrero de 2020, de Saginomiya Seisakusho, Inc: Dispositivo de ensayo, en el que se aplica potencia externa a la construcción que va a someterse a ensayo (E) y se realizan diversos ensayos, comprendiendo […]
Sistema y método de prueba de adherencia, del 12 de Febrero de 2020, de CRRC Xi'An Yongejietong Electric Co., Ltd: Un sistema de prueba de adherencia, que comprende una rueda motriz para simular una rueda móvil, una rueda accionada para simular un raíl de acero, un dispositivo […]
Simulador para posicionar los asientos en un bus, del 1 de Enero de 2020, de IVECO FRANCE S.A.S: Simulador para posicionar asientos en un bus, dicho simulador que comprende un marco provisto de medios de fijación para al menos un primer asiento […]
Robot de dirección, del 18 de Diciembre de 2019, de Humanetics Austria GmbH: Robot de dirección para el accionamiento automático del volante de un vehículo con una unidad de accionamiento que comprende una carcasa […]