RED INTERFAZ SENSOR-ACTUADOR PARA GRANDES DISTANCIAS.
Red interfaz sensor-actuador con una pluralidad de participantes en la comunicación (6-8),
los cuales se encuentran conformados como maestro o como sensores y/o actuadores y, los cuales se encuentran conectados, mediante un respectivo circuito de adaptación (13), a una línea de bus (4) y, mediante al menos un alimentador (11) conectado a la línea de bus (4) son abastecidos de energía, con lo cual se prevé una transmisión de datos entre los participantes en la comunicación (6-8), caracterizada porque,
- el alimentador (11) se encuentra conectado a la línea de bus (4) mediante una unidad de desacoplamiento de datos (12),
- se transmiten pulsos de tensión no diferenciados entre los participantes en la comunicación (6-8) mediante la línea de bus (4),
- los pulsos de tensión enviados por el emisor mediante la línea de bus (4) son dirigidos al respectivo participante en la comunicación (6-8), a través del respectivo circuito de adaptación (13), y
- estos pulsos de tensión son transformados en pulsos de corriente en el circuito de adaptación (13) y éstos se diferencian en el mismo circuito de adaptación (13) o en un alimentador de la interfaz sensor-actuador de una subred de la red conectada, conectado al circuito de adaptación (13), encontrándose de este modo, conforme a la especificación, a disposición de los participantes en la comunicación (6-8)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2005/052991.
Solicitante: SIEMENS AKTIENGESELLSCHAFT.
Nacionalidad solicitante: Alemania.
Dirección: WITTELSBACHERPLATZ 2,80333 MUNCHEN.
Inventor/es: INDEFREY,KLAUS, SCHIFF,ANDREAS.
Fecha de Publicación: .
Fecha Concesión Europea: 3 de Marzo de 2010.
Clasificación Internacional de Patentes:
- G05B19/418N
Clasificación PCT:
- G05B19/418 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Control total de una fábrica, es decir, control centralizado de varias máquinas, p. ej. control numérico directo o distribuido (DNC), sistemas de fabricación flexibles (FMS), sistemas de fabricación integrados (IMS), fabricación integrada por computador (CIM).
Clasificación antigua:
- G05B19/418 G05B 19/00 […] › Control total de una fábrica, es decir, control centralizado de varias máquinas, p. ej. control numérico directo o distribuido (DNC), sistemas de fabricación flexibles (FMS), sistemas de fabricación integrados (IMS), fabricación integrada por computador (CIM).
Fragmento de la descripción:
Red interfaz sensor-actuador para grandes distancias.
La presente invención hace referencia a una red interfaz sensor-actuador (interfaz AS o AS-I) con una pluralidad de participantes en la comunicación, los cuales se encuentran conformados como maestros o como sensores y/o actuadores y, los cuales se encuentran conectados, mediante un respectivo circuito de adaptación, a una línea de bus y, mediante al menos un alimentador conectado a la línea de bus, son abastecidos de energía, con lo cual se prevé una transmisión de datos entre los participantes en la comunicación.
El concepto "interfaz" de sensor-actuador para la automatización define un sistema de una línea de bus con participantes en la comunicación conectados a la misma.
En la publicación de Werner Kriesel, Otto W. Madelung (Editor): "AS-I- la interfaz de sensor-actuador para la automatización", editorial Hansa, Munich, Viena, 1994, es descrita, en el apartado 6.3, con respecto al tema "Repetidores y ampliaciones de la red", la posibilidad de extender tales redes AS-I también a distancias mayores.
AS-I se comprende como una "interfaz", es decir como una interfaz para sensores y actuadores, los cuales se encuentran conectados a un control microprocesador.
Por este motivo, AS-I tampoco es un bus de campo, sino que ha sido concebido especialmente para el intercambio de información de sensores y actuadores con un controlador, y por ello se ubica por debajo de lo que actualmente se conoce como "la capa del bus de campo".
La parte principal de AS-I es un chip esclavo, al cual se encuentran acoplados en forma digital, y al mismo tiempo a bajo costo, los sensores y actuadores en el circuito AS-I. En cada ciclo de petición se transmiten en serie informaciones de 6 bits netos desde un maestro a cada esclavo y 4 bits de retorno. Éstas pueden ser utilizadas como datos de entrada o de salida. El circuito AS-I es, a grandes rasgos, un cable de banda plana blindado de dos conductores o un cable redondo estándar, mediante el cual son transmitidas, al mismo tiempo, señales y energía.
Las redes interfaz sensor-actuador se limitan a una extensión máxima de aproximadamente 100 m, cuando no debe instalarse ningún repetidor. La causa de tal limitación es la distorsión de la señal de transmisión, a través de reflexiones en el extremo abierto del cable, así como de oscilaciones en el cable, las cuales son accionadas por pulsos de envío. Incluso con repetidores, la extensión de la red sólo puede extenderse otros 200 m. Existen también otras posibilidades (el sensor fotoeléctrico, entre otras), las cuales, sin embargo, emplean todos los circuitos analógicos de la interfaz AS-I estándar en la interfaz.
Existe también una solución más novedosa mediante una impedancia final, la cual nos lleva al mismo solicitante (DE-GM 202004004637.7), el cual permite un alargamiento del cable sin un repetidor.
Sin embargo, también en este caso, las limitaciones físicas imposibilitan un alargamiento por encima de entre 200 m a 300 m de extensión de la red. Uno de los motivos para ello, es que la red interfaz sensor-actuador no se encuentra ajustada en forma óptima a la impedancia de la línea, es decir, que de esto último provienen reflexiones que alteran las señales de transmisión. Otro motivo es que, en el caso de participantes que se encuentren dispuestos a gran distancia del alimentador con su acoplamiento de datos, el cual conforma pulsos, la conversión de la señal de corriente en una señal de tensión ya no funciona correctamente. El motivo es la impedancia de la línea entre el participante y el alimentador, la cual ya no es insignificantemente pequeña con respecto a la impedancia del acoplamiento de datos. De este modo, la señal se distorsiona con tal intensidad, que un receptor de la interfaz sensor-actuador conforme a la especificación, ya no puede decodificarla sin errores.
En numerosas aplicaciones, por ejemplo en la técnica del transporte, sería deseable el que la interfaz sensor-actuador pueda franquear también distancias mayores, hasta de varios kilómetros. Una aplicación típica, es el control de bandas transportadoras para canteras. En este caso, la tarea consiste en controlar si cada banda del tramo de transporte se encuentra sobrecargada. Si es éste el caso, cada banda por separado, o todas, deben ser detenidas, para impedir que se produzcan daños mayores. Además, pueden ser instalados disyuntores de emergencia en distancias regulares. También en la técnica de procedimientos y de procesos, y en la automatización en edificios, deben franquearse frecuentemente distancias mayores entre cada dispositivo de campo dentro de un bus.
Otra tarea podría consistir, en conectar unas con otras varias partes de la instalación, las cuales se encuentran ubicadas a gran distancia unas de otras, y poder controlarlas mediante un dispositivo de control. La red interfaz sensor-actuador puede, de este modo, encontrarse dividida en varias subredes, las cuales se encuentren separadas físicamente, pero las que, formen un conjunto lógico.
El objeto de la presente invención es el perfeccionar la red interfaz sensor-actuador, de modo tal, que los datos en la línea de bus puedan ser transmitidos con la menor distorsión posible, también a través de distancias mayores. Dentro del marco de la invención, deben comprenderse distancias mayores como distancias de la red de más de 300 m sin un repetidor.
Este objeto se alcanzará mediante las características conformes a la reivindicación 1.
Una característica fundamental de la presente invención, es el que una nueva clase de acoplamiento de datos en dirección a la línea de bus es añadida al alimentador, y que cada participante en la comunicación se encuentra conectado a la línea de bus mediante un circuito de adaptación.
Otros perfeccionamientos de la presente invención resultan de las reivindicaciones dependientes.
Una ventaja de las medidas conformes a la invención es que, de ahora en adelante, no se producen reflexiones en la línea de bus, incluso si la longitud del bus es considerablemente mayor a 300 m. Esto reside, en primer lugar, en la óptima adaptación de las resistencias de terminación conectadas en ambos extremos de la línea de bus y, en segundo lugar, en la unidad de desacoplamiento de datos del alimentador en dirección de la línea de bus y en los circuitos de adaptación adicionales de cada participante en la comunicación en la línea de bus, los cuales son una novedad con respecto al estado de la técnica. A través de este concepto se materializa un enfoque diferente:
La impedancia del acoplamiento de datos es evidentemente mayor que la impedancia de terminación de la línea de bus.
La topología de la red se limita a una estructura de líneas con ramificaciones breves.
Se prevén dos resistencias de terminación en ambos extremos de la línea de bus de alrededor de 120 ohmios respectivamente (en serie, con una capacidad de bloqueo de la tensión continua de aproximadamente de 500 nF). Las resistencias son escogidas de modo tal en cuanto a su tamaño, que aíslen la línea de bus en forma óptima y supriman completamente las reflexiones.
Entre la red y los participantes en la comunicación (es decir, maestros, esclavos, monitor de seguridad, comprobadores de diagnóstico y similares) son intercalados los circuitos de adaptación conformes a la invención o es modificado el circuito receptor del esclavo.
La señal en la línea de bus se encuentra siempre también a la misma distancia con respecto a los participantes en la comunicación colocados en la línea de bus, y es independiente del participante en la comunicación emisor y receptor en la línea de bus.
La transmisión de los datos lleva, en cada punto de la línea, a una sucesión de variaciones de tensión, las cuales pueden ser fácilmente evaluadas por un receptor, el cual se encuentra conectado al circuito de adaptación. Estos pulsos no corresponden a los pulsos de tensión definidos en la especificación de la interfaz sensor-actuador, sino fundamentalmente a su integral.
Los pulsos de tensión recibidos son transportados en el mismo circuito de adaptación o en el alimentador conectado al circuito de adaptación de acuerdo...
Reivindicaciones:
1. Red interfaz sensor-actuador con una pluralidad de participantes en la comunicación (6-8), los cuales se encuentran conformados como maestro o como sensores y/o actuadores y, los cuales se encuentran conectados, mediante un respectivo circuito de adaptación (13), a una línea de bus (4) y, mediante al menos un alimentador (11) conectado a la línea de bus (4) son abastecidos de energía, con lo cual se prevé una transmisión de datos entre los participantes en la comunicación (6-8), caracterizada porque,
2. Red interfaz sensor-actuador conforme a la reivindicación 1, caracterizada porque, la transmisión de datos en cada punto de la línea conduce a una serie de variaciones de tensión, las cuales son evaluadas por el receptor, el cual se encuentra conectado al circuito de adaptación (13) y porque, los pulsos de tensión transmitidos son directamente proporcionales a los pulsos de corriente enviados.
3. Red interfaz sensor-actuador conforme a la reivindicación 1 ó 2, caracterizada porque, una unidad de desacoplamiento de datos (12) se encuentra conectada aguas arriba del alimentador (11), dicha unidad de desacoplamiento se encuentra constituida por dos inductancias, cada una de alrededor de 2000 a 5000 µH.
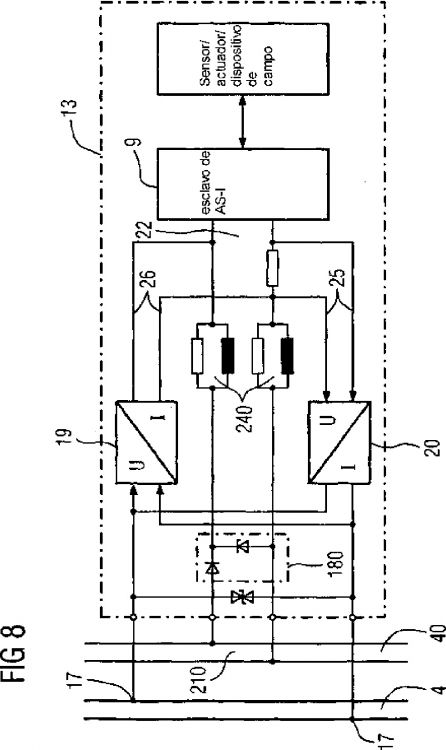
4. Red interfaz sensor-actuador conforme a una de las reivindicaciones 1 a 3, caracterizada porque, el circuito de adaptación (13) presenta una separación galvánica con respecto a la red.
5. Red interfaz sensor-actuador conforme a una de las reivindicaciones 1 a 4, caracterizada porque dos o varias subredes de la interfaz sensor-actuador se encuentran conectadas unas a otras a través de circuitos de adaptación.
6. Red interfaz sensor-actuador conforme a una de las reivindicaciones 1 a 5, caracterizada porque, el circuito de adaptación (13) se encuentra acoplado a la línea de bus (4) y efectúa una conversión de tensión a corriente en dirección del participante en la comunicación (9-10), así como efectúa una conversión de tensión a corriente, cuando el participante en la comunicación (9-10) envía y acopla los pulsos así transformados a la línea de bus (4).
7. Red interfaz sensor-actuador conforme a una de las reivindicaciones 1 a 6, caracterizada porque, es previsto un abastecimiento de energía, el cual actúa a través del circuito de adaptación (13) y porque, se encuentra presente un conversor DC (18), detrás del cual se lleva a cabo una diferenciación de los pulsos de corriente mediante un condensador (23) y un circuito paralelo inductor (24).
8. Red interfaz sensor-actuador conforme a una de las reivindicaciones 1 a 7, caracterizada porque, el circuito de adaptación (13) se encuentra integrado directamente en el participante en la comunicación (6-8).
9. Utilización de la red interfaz sensor-actuador conforme a una de las reivindicaciones 1 a 8 en zonas donde se presentan riesgos de explosión, en especial en la automatización de procesos.
Patentes similares o relacionadas:
PROCEDIMIENTO Y DISPOSITIVO PARA CONTROLAR UNA PLURALIDAD DE MANIPULADORES, del 8 de Septiembre de 2011, de KUKA ROBOTER GMBH: Procedimiento para controlar una pluralidad de manipuladores, con cierto número de unidades de mando que están asignadas a los manipuladores de […]
PROCEDIMIENTO, NODO Y RED PARA EL ENVÍO CÍCLICO DE TELEGRAMAS DE ETHERNET, del 31 de Marzo de 2011, de BECKHOFF AUTOMATION GMBH: Procedimiento para el envío de datos en forma de telegramas de Ethernet a través de un nodo en un recorrido de transmisión de Ethernet, con las siguientes etapas del […]
PROCEDIMIENTO Y SISTEMA DE CONTROL DE PROCESOS PARA OPERAR UNA INSTALACIÓN TÉCNICA, del 16 de Febrero de 2011, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para operar una instalación técnica con cierta cantidad de equipos de campo (FD) para la supervisión y el control de componentes de la instalación […]
 DISPOSITIVO DE CAMPO PARA UN SISTEMA DE BUS DE CAMPO, del 21 de Octubre de 2010, de ABB SERVICE S.R.L: Dispositivo de campo adecuado para la instalación en un ambiente industrial comprendiendo medios para la conexión a una red de bus de campo y medios de […]
DISPOSITIVO DE CAMPO PARA UN SISTEMA DE BUS DE CAMPO, del 21 de Octubre de 2010, de ABB SERVICE S.R.L: Dispositivo de campo adecuado para la instalación en un ambiente industrial comprendiendo medios para la conexión a una red de bus de campo y medios de […]
 PROCEDIMIENTO DE INTERCAMBIO DE DATOS ENTRE SISTEMAS DE MANDO DE MAQUINAS, Y EN PARTICULAR DE ROBOTS, del 4 de Mayo de 2010, de KUKA ROBOTER GMBH: Procedimiento de intercambio de datos entre sistemas de mando de máquinas, y en particular de robots, donde un primer sistema de mando genera una instrucción a transmitir […]
PROCEDIMIENTO DE INTERCAMBIO DE DATOS ENTRE SISTEMAS DE MANDO DE MAQUINAS, Y EN PARTICULAR DE ROBOTS, del 4 de Mayo de 2010, de KUKA ROBOTER GMBH: Procedimiento de intercambio de datos entre sistemas de mando de máquinas, y en particular de robots, donde un primer sistema de mando genera una instrucción a transmitir […]
 UNIDAD DEPENDIENTE, UNIDAD DE NODO, CONTROLADORES Y SISTEMA DE RED, del 6 de Noviembre de 2009, de OMRON CORPORATION: Un dispositivo de nodo que puede conectarse a una red para automatizar una factoría (FA), que comprende: medios para obtener, a partir de una primera unidad dependiente […]
UNIDAD DEPENDIENTE, UNIDAD DE NODO, CONTROLADORES Y SISTEMA DE RED, del 6 de Noviembre de 2009, de OMRON CORPORATION: Un dispositivo de nodo que puede conectarse a una red para automatizar una factoría (FA), que comprende: medios para obtener, a partir de una primera unidad dependiente […]
 METODO Y SISTEMA UNIVERSAL Y RECONFIGURABLE DE LECTURA REMOTA DE CONTADORES O EQUIPOS PROVISTOS DE INDICADORES VISUALES, del 16 de Noviembre de 2007, de SERVICIOS INFORMATICOS KIFER, S.L.
UNIVERSIDAD DEL PAIS VASCO (UPV-EHU)
SERVICIOS DE TXINGUIDI, S.A.
UNIVERSIDAD AUTONOMA DE BARCELONA - UAB
CSIC-CONSEJO SUP. INVEST. CIENTIFICAS: Método y sistema universal y reconfigurable de lectura remota de contadores o equipos provistos de indicadores visuales.#Sistema de lectura remota de cortadores o […]
METODO Y SISTEMA UNIVERSAL Y RECONFIGURABLE DE LECTURA REMOTA DE CONTADORES O EQUIPOS PROVISTOS DE INDICADORES VISUALES, del 16 de Noviembre de 2007, de SERVICIOS INFORMATICOS KIFER, S.L.
UNIVERSIDAD DEL PAIS VASCO (UPV-EHU)
SERVICIOS DE TXINGUIDI, S.A.
UNIVERSIDAD AUTONOMA DE BARCELONA - UAB
CSIC-CONSEJO SUP. INVEST. CIENTIFICAS: Método y sistema universal y reconfigurable de lectura remota de contadores o equipos provistos de indicadores visuales.#Sistema de lectura remota de cortadores o […]
Sistema de trabajo estéril, del 1 de Julio de 2020, de Shibuya Corporation: Un sistema de trabajo estéril para permitir que un trabajador realice un trabajo estéril requerido para cultivo dentro de una cámara estéril del sistema que tiene […]