METODOS Y ARTICULOS PARA DETECCION, VERIFICACION Y REPARACION DE COLINEALIDADES.
Un método para analizar un modelo para Control Predictivo basado en Modelos,
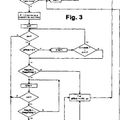
cuyo método comprende las etapas de: a) obtener (1) una matriz de ganancia del modelo de 5 un modelo objeto utilizado para el Control Predictivo basado en Modelos de un proceso dado; caracterizado porque comprende, además, las etapas de: b) identificar (4) cualesquiera submatrices casi colineales de la matriz de ganancias del modelo obtenida; 10 c) ajustar (6) la colinealidad de cualesquiera submatrices identificadas y d) optimizar (8) las submatrices ajustadas para formar una nueva matriz de ganancias del modelo para el modelo objeto. 15
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2004/008357.
Solicitante: ASPEN TECHNOLOGY, INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 200 WHEELER ROAD BURLINGTON, MA 01803 ESTADOS UNIDOS DE AMERICA.
Inventor/es: MCINTYRE,BLAINE, HARMSE,MAGIEL,J, ZHENG,QINGSHENG, RASMUSSEN,KENT,H.
Fecha de Publicación: .
Fecha Solicitud PCT: 19 de Marzo de 2004.
Fecha Concesión Europea: 30 de Junio de 2010.
Clasificación Internacional de Patentes:
- G05B13/04D
Clasificación PCT:
- G05B13/04 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 13/00 Sistemas de control adaptativos, es decir, sistemas que se regulan a sí mismos para obtener un rendimiento óptimo siguiendo un criterio predeterminado (G05B 19/00 tiene prioridad; aprendizaje automático G06N 20/00). › que implican el uso de modelos o de simuladores.
Clasificación antigua:
- G05B13/04 G05B 13/00 […] › que implican el uso de modelos o de simuladores.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Solicitud relacionada 5
Esta solicitud reivindica el beneficio de la solicitud provisional en Estados Unidos número 60/457.060 presentada el 21 de marzo de 2003. Las enseñanzas completas de dicha aplicación se incorporan aquí por referencia. 10
Antecedentes de la invención
El Control Predictivo basado en Modelos (en adelante referido como “MPC”) es una tecnología utilizada en varios sistemas de Control Avanzado de Procesos (en adelante referido como “APC”). Los sistemas basados en 15 MPC han sido realizados en miles de procesos de refino y químicos durante las dos últimas décadas. DMCplus® y la versión anterior, DMC, (ambas disponibles a través de Aspen Technology, Inc. de Cambridge, Massachusetts) es un sistema basado en MPC ampliamente utilizado. En un 20 sistema basado en MPC, se utiliza un modelo para predecir el comportamiento futuro de un proceso, dada la información de entrada actual e histórica (p.e., mediciones de condiciones de procesos). Un plan de control optimizado se calcula de modo que la respuesta 25 futura prevista y la acción de control necesaria para conseguir la respuesta habrán de satisfacer algunos criterios predefinidos. Una vez ejecutado el plan de control calculado (p.e., después de que se establezca el primer punto del movimiento de control), se recogen las 30 mediciones de procesos y se realimentan al controlador para actualizar las predicciones de modelos. A
continuación, se inicia un nuevo cálculo de plan de control.
En un controlador basado en MPC, el modelo desempeña un papel central. El modelo no solamente dicta la exactitud de las predicciones, sino que también afecta a 5 las acciones de control. La incertidumbre del modelo es inevitable en la práctica, por lo que la calidad del modelo debe evaluarse basándose en su aplicación pertinente (es decir, no solamente la capacidad predictiva del modelo, sino también su rendimiento de 10 control).
La colinealidad en el modelo influye, en gran medida, en el rendimiento de control. Una acción de control excesiva es un problema asociado con la colinealidad no resuelta en un modelo. La acción del 15 controlador, al menos en alguna medida, refleja la respuesta del universo del modelo. Cuando el modelo es casi colineal, pero no es perfectamente colineal, la acción de control excesiva se puede generar en respuesta a cambios en las restricciones del sistema o para 20 conseguir mejoras insignificantes en las funciones objetivos. Un segundo problema asociado con la colinealidad no resuelta es el del control en bucle cerrado inestable. Si el modelo y el proceso subyacente son casi colineales, pero tienen diferente 25 direccionalidad, el sistema en bucle cerrado se hará inestable. Un tercer problema asociado con la colinealidad no resuelta es el rendimiento del proceso deficiente. Si el proceso subyacente objeto del modelo no es colineal, pero el modelo lo es, en tal caso el 30 controlador tratará el proceso como si tuviera menos grados de libertad en las variables controladas y no
explorará el potencial completo del proceso. Un rendimiento de control deficiente puede causar también daños a la operación normal del proceso.
Se han realizado numerosos intentos para atenuar los problemas planteados por la colinealidad para 5 realizaciones de MPC. Por ejemplo, algunas herramientas desarrolladas por la comunidad de APC detectan un modelo colineal, o subconjuntos de modelo, mediante el uso de una Matriz de Ganancias Relativas (en adelante referida como RGA) o la Descomposición de Valor Singular (en 10 adelante referida como SVD) para detectar un modelo colineal o subconjuntos del modelo. Véase, por ejemplo, J.M. Maciejowski‟s "Diseño de Realimentación Multivariable", publicado por Addison-Wesley Publishing Company, 1990, ISBN 0-201-18243-2, cuyas enseñanzas 15 completas son aquí incorporadas por referencia. Algunas de dichas herramientas ajustan, además, el modelo para reducir al mínimo el número de RGA; sin embargo, dichos métodos están limitados a un sistema 2x2.
El documento US 6026334 da a conocer un sistema de 20 control para calcular varias señales de control de salida para su uso en un sistema de fabricación de papel continuo.
Existe una necesidad de métodos y artículos para, de una forma simétrica, detectar, verificar y reparar 25 modelos colineales.
Sumario de la invención
La presente invención da a conocer métodos sistemáticos para detectar, verificar y reparar la colinealidad de un modelo o sus subconjuntos (también 30 referidos como “submatrices”), tales como modelos utilizados para control basado en MPC.
En un aspecto de la invención, se da a conocer un método para analizar un modelo para el Control Predictivo basado en Modelos, comprendiendo dicho método las etapas de: a) obtener una matriz de ganancia de modelo de un modelo objeto utilizado para el Control Predictivo basado 5 en Modelos de un proceso dado, caracterizado porque comprende, además, las etapas de: b) identificar cualesquiera submatrices casi colineales de la matriz de ganancia de modelo obtenida; c) ajustar la colinealidad de cualesquiera submatrices identificadas y d) optimizar 10 las submatrices ajustadas para constituir una nueva matriz de ganancia de modelo para el modelo del que se trata.
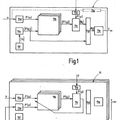
En otro aspecto de la invención se da a conocer un sistema informático para analizar un modelo para el 15 Control Predictivo basado en Modelos, comprendiendo dicho sistema informático: a) un medio de transmisión de datos para trasmitir datos entre componentes de un ordenador; b) un procesador digital acoplado para recibir entrada desde el medio de transmisión de datos, en donde el 20 procesador digital ejecuta un método para analizar un modelo utilizado para fines de Control Predictivo basado en Modelos, en donde el procesador digital está adaptado para: (i) obtener una matriz de ganancia de modelo de un modelo objeto utilizado para Control Predictivo basado en 25 Modelos de un proceso dado, caracterizado porque está adaptado, además, para: (ii) identificar cualesquiera submatrices casi colineales de la matriz de ganancia de modelos obtenida, (iii) ajustar la colinealidad de cualesquiera submatrices identificadas y (iv) optimizar 30 las submatrices ajustadas para formar una nueva matriz de ganancia de modelo para el modelo objeto y c) un medio de
salida acoplado al procesador digital, en donde el medio de salida proporciona a un usuario el modelo analizado.
En una forma de realización de la invención, un método utiliza primero SVD para la búsqueda de una matriz de modelo dada e identificar todos los subconjuntos de 5 modelos casi colineales basados en establecer umbrales de números de condiciones. A continuación, el método estima la magnitud o agresividad de la acción de control si el modelo se utiliza para control basado en MPC.
El método recomienda una prueba en planta 10 direccional para inducir al proceso en su dirección débil. Después de la prueba en planta direccional, se realiza una nueva identificación del modelo en el espacio transformado abarcado por vectores singulares. El resultado de la identificación transformada se utiliza 15 para comprobar si el proceso subyacente es verdaderamente colineal. Si la comprobación concluye que el proceso, o una parte del proceso, es casi colineal, en tal caso se realiza un procedimiento de “colinealización”. Si la comprobación indica que el proceso no está próximo a la 20 colinealidad, en tal caso se pone en práctica un procedimiento de “descolinealización”.
En la colinealización, los más pequeños valores singulares de cada subconjunto seleccionado del modelo se ponen a exactamente ceros, mientras se mantiene 25 invariable la direccionalidad (es decir, con los mismos vectores singulares). Si más de una solución está disponible se selecciona la que está más próxima al modelo original y se reduce al mínimo la desviación. En la descolinealización, los números de condiciones de cada 30 subconjunto seleccionado del modelo se maximizan mediante el ajuste del modelo mientras que se mantiene invariable
la direccionalidad. En uno u otro caso, el modelo se ajusta sujeto a las restricciones dadas (p.e., los contornos de incertidumbre del modelo o cualesquiera ecuaciones lineales).
En algunas formas de realización, esta invención 5 comprende una metodología sistemática para detectar, verificar y reparar la colinealidad o casi colinealidad en modelo utilizado para fines del Control...
Reivindicaciones:
Reivindicaciones
1. Un método para analizar un modelo para Control Predictivo basado en Modelos, cuyo método comprende las etapas de:
a) obtener (1) una matriz de ganancia del modelo de 5 un modelo objeto utilizado para el Control Predictivo basado en Modelos de un proceso dado; caracterizado porque comprende, además, las etapas de:
b) identificar (4) cualesquiera submatrices casi colineales de la matriz de ganancias del modelo obtenida; 10
c) ajustar (6) la colinealidad de cualesquiera submatrices identificadas y
d) optimizar (8) las submatrices ajustadas para formar una nueva matriz de ganancias del modelo para el modelo objeto. 15
2. El método según la reivindicación 1, en donde la etapa de identificación comprende la búsqueda de la matriz de ganancia del modelo con SVD.
3. El método según la reivindicación 1, que comprende, además, una etapa de estimación de una 20 magnitud de acción de control.
4. El método según la reivindicación 1, que comprende, además, una etapa de activar el proceso dado en una dirección débil.
5. El método según la reivindicación 1, que 25 comprende, además, una etapa de comprobar si al menos alguna parte del proceso dado es colineal o casi colineal.
6. El método según la reivindicación 5, en donde se realiza un procedimiento colinealización si al menos una 30 parte del proceso se comprueba que es casi colineal.
7. El método según la reivindicación 6, en donde
los más pequeños valores singulares, en al menos un subconjunto del modelo, están puestos a exactamente cero.
8. El método según la reivindicación 5, en donde la direccionalidad de un subconjunto del modelo es invariable. 5
9. El método según la reivindicación 5, en donde se realiza un proceso de descolinealización si al menos una parte del proceso se comprueba que es no colineal.
10. El método según la reivindicación 1, en donde el método se aplica simultáneamente a más de un 10 subconjunto del modelo.
11. El método según la reivindicación 1, el método se aplica a una matriz cuadrada o un subconjunto de matriz cuadrada que es al menos 2x2 en tamaño.
12. El método según la reivindicación 11, en donde 15 la matriz cuadrada o un subconjunto de matriz cuadrada es al menos 3x3 en tamaño.
13. El método según la reivindicación 12, en donde la matriz cuadrada o un subconjunto de matriz cuadrada es al menos de 4x4 en tamaño. 20
14. El método según la reivindicación 12, en donde la matriz cuadrada o un subconjunto de matriz cuadrada es al menos de 5x5 en tamaño.
15. El método según la reivindicación 12, en donde la matriz cuadrada o un subconjunto de matriz cuadrada es 25 al menos de 6x6 en tamaño.
16. El método según la reivindicación 1 que comprende, además, detectar, verificar y reparar la colinealidad o casi colinealidad en un modelo, que presenta las etapas de: 30
a) definir contornos para una matriz de ganancia;
b) especificar un umbral colineal;
c) examinar la matriz para identificar todas las submatrices casi colineales;
d) escalar al menos una salida débil para cada submatriz casi colineal;
e) ajustar una magnitud de acción de control; 5
f) determinar qué tipo de reparación de modelo sería deseable;
g) enunciar un problema de programación cuadrática y
h) resolver el problema de programación cuadrática para generar una nueva matriz de modelo. 10
17. El método según la reivindicación 16, que comprende, además, la etapa de utilizar una fórmula de optimización para colinealizar perfectamente un submodelo seleccionado al mismo tiempo que se mantiene la direccionalidad y se reduce al mínimo la desviación del 15 modelo.
18. El método según la reivindicación 17, en donde la fórmula de optimización comprende al menos un valor singular, al menos un vector singular y una matriz de modelo. 20
19. El método según la reivindicación 17, en donde se resuelven simultáneamente múltiples submatrices.
20. El método según la reivindicación 17, en donde se impone una restricción lineal, incluyendo dicha restricción lineal el contorno de incertidumbre en un 25 espacio transformado.
21. El método según la reivindicación 16, que comprende, además, la etapa de utilizar una fórmula de optimización para disminuir la colinealidad, en un submodelo seleccionado, al mismo tiempo que se mantiene 30 la direccionalidad y se reduce al mínimo la desviación del modelo.
22. El método según la reivindicación 21, en donde la fórmula de optimización comprende al menos un valor singular, al menos un vector singular y una matriz de modelo.
23. El método según la reivindicación 22, en donde 5 se resuelven simultáneamente múltiples submatrices.
24. El método según la reivindicación 22, en donde se impone una restricción lineal y dicha restricción lineal comprende el contorno de incertidumbre en un espacio transformado. 10
25. Un producto de programa informático, que comprende:
a) un medio utilizable por ordenador y
b) un conjunto de instrucciones de programa informático materializado en el medio utilizables por 15 ordenador para analizar un modelo para el denominado Control Predictivo basado en Modelos, comprendiendo las instrucciones de programa informático las instrucciones para: obtener (1) una matriz de ganancia de modelo de un modelo objeto utilizado para el Control Predictivo basado 20 en Modelos de un proceso dado, caracterizado porque comprende, además, instrucciones para:
identificar (4) cualesquiera submatrices casi colineales de la matriz de ganancia de modelo obtenida;
ajustar (6) la colinealidad de cualesquiera 25 submatrices identificadas y
optimizar (8) las submatrices ajustadas para formar una nueva matriz de ganancia del modelo para el modelo objeto.
26. El producto de programa informático según la 30 reivindicación 25, en donde al menos alguna parte de las instrucciones de programa informático comprenden
instrucciones para solicitar datos o solicitar instrucciones a través de una red de telecomunicaciones.
27. El producto de programa informático según la reivindicación 25, en donde al menos alguna parte del programa informático se transmite a través de una red 5 global.
28. El producto de programa informático según la reivindicación 25, en donde el medio utilizable por ordenador comprende un medio de almacenamiento extraíble.
29. El producto de programa informático según la 10 reivindicación 28, en donde el medio de almacenamiento extraíble comprende cualquiera de una memoria CD-ROM, una memoria DVD-ROM, un disquete y una cinta.
30. Un sistema informático para analizar un modelo para el denominado Control Predictivo basado en Modelos, 15 comprendiendo el sistema informático:
a) un medio de transmisión de datos para transmitir datos entre componentes de un ordenador;
b) un procesador digital acoplado para recibir la entrada procedente del medio de transmisión de datos, en 20 donde el procesador digital realiza un método para analizar un modelo utilizado para los fines de Control Predictivo basado en Modelos, en donde el procesador digital está adaptado para:
i) obtener (1) una matriz de ganancia de modelo de 25 un modelo objeto utilizado para el Control Predictivo basado en Modelos de un proceso dado, caracterizado porque está, además, adaptado para:
ii) identificar (4) cualesquiera submatrices casi colineales de la matriz de ganancia de modelo obtenida; 30
iii) ajustar (6) la colinealidad de cualesquiera submatrices identificadas y
iv) optimizar (8) submatrices ajustadas para formar una nueva matriz de ganancia de modelo para el modelo objeto y
c) un medio de salida acoplado al procesador digital, en donde el medio de salida proporciona a un 5 usuario el modelo analizado.
31. El sistema informático según la reivindicación 30, en donde dicho sistema informático permite la transmisión de al menos una parte de datos a través de una red global. 10
32. Una especie química fabricada por un proceso que comprende el método según la reivindicación 16.
Patentes similares o relacionadas:
 CIRCUITO REGULADOR, PARA LA REGULACIÓN DE UN PROCESO, EN PARTICULAR UN PROCESO DE COMBUSTIÓN, del 24 de Febrero de 2011, de POWITEC INTELLIGENT TECHNOLOGIES GMBH: Circuito regulador, para la regulación de un proceso, en particular un proceso de combustión en una instalación , en especial en una central […]
CIRCUITO REGULADOR, PARA LA REGULACIÓN DE UN PROCESO, EN PARTICULAR UN PROCESO DE COMBUSTIÓN, del 24 de Febrero de 2011, de POWITEC INTELLIGENT TECHNOLOGIES GMBH: Circuito regulador, para la regulación de un proceso, en particular un proceso de combustión en una instalación , en especial en una central […]
 PROCEDIMIENTO Y DISPOSITIVO DE REGULACION SUBOPTIMA POR MEDIO DE UNA ESTRATEGIA DE BUSQUEDA Y PROCEDIMIENTO Y DISPOSITIVO DE DESCOMPOSICION DE GAS, ESPECIALMENTE DE DESCOMPOSICION DE AIRE A BAJA TEMPERATURA, del 11 de Noviembre de 2009, de LINDE AKTIENGESELLSCHAFT: Procedimiento para regular un sistema técnico que presenta al menos
- una magnitud de ajuste,
- una magnitud de regulación y
- una magnitud de […]
PROCEDIMIENTO Y DISPOSITIVO DE REGULACION SUBOPTIMA POR MEDIO DE UNA ESTRATEGIA DE BUSQUEDA Y PROCEDIMIENTO Y DISPOSITIVO DE DESCOMPOSICION DE GAS, ESPECIALMENTE DE DESCOMPOSICION DE AIRE A BAJA TEMPERATURA, del 11 de Noviembre de 2009, de LINDE AKTIENGESELLSCHAFT: Procedimiento para regular un sistema técnico que presenta al menos
- una magnitud de ajuste,
- una magnitud de regulación y
- una magnitud de […]
 PROCEDIMIENTO PARA OBTENER UN SISTEMA DE CONTR0L DIGITAL PREDICTIVO CUASI-OPTIMO CON REQUISITOS COMPUTACIONALES REDUCIDOS, del 16 de Octubre de 2007, de MODEL PREDICTIVE CONTROL, S.L.: La invención consiste en un procedimiento que permite obtener, para un determinado problema de control de proceso en el dominio temporal, un sistema de […]
PROCEDIMIENTO PARA OBTENER UN SISTEMA DE CONTR0L DIGITAL PREDICTIVO CUASI-OPTIMO CON REQUISITOS COMPUTACIONALES REDUCIDOS, del 16 de Octubre de 2007, de MODEL PREDICTIVE CONTROL, S.L.: La invención consiste en un procedimiento que permite obtener, para un determinado problema de control de proceso en el dominio temporal, un sistema de […]
Utilización de un controlador multivariable avanzado para el control de unidades alfabutol, del 17 de Junio de 2020, de AXENS: Procedimiento de control avanzado (APC) que se puede aplicar a unidades para la oligomerización de etileno a buteno-1 que operan en un reactor en presencia de un catalizador […]
Método de control de propiedades en sistemas multimodales, del 18 de Marzo de 2020, de UNION CARBIDE CHEMICALS & PLASTICS TECHNOLOGY LLC: Un método de control de un procedimiento para producir un polímero de olefina en al menos un reactor, que comprende: (a) calcular un primer valor de al menos una propiedad […]
Procedimiento combinado para detectar anomalías en un sistema de distribución de agua, del 8 de Enero de 2020, de SUEZ Groupe: Un procedimiento para detectar anomalías en un sistema de distribución de agua compuesto por una red de nodos, comprendiendo dicho […]
Equipo de control electrónico para un componente de la generación de aire comprimido, tratamiento de aire comprimido, almacenamiento de aire comprimido y/o distribución de aire comprimido, del 11 de Diciembre de 2019, de KAESER KOMPRESSOREN SE: Equipo de control electrónico para un componente de la generación de aire comprimido, tratamiento de aire comprimido, almacenamiento de aire comprimido […]
Procedimiento para optimizar perfiles de movimiento, procedimiento para proporcionar perfiles de movimiento, dispositivo de control, instalación y producto de programa informático, del 4 de Diciembre de 2019, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para optimizar los perfiles de movimiento (B1, B2) en una instalación (A), donde la instalación (A) presenta al menos una prensa (1a, 1b, 1c) con […]