METODO PARA DETERMINAR LA POSICION DE UN ELEMENTO ARRASTRADO POR EL EJE DE ACCIONAMIENTO DE UN MOTOR DE CORRIENTE CONTINUA.
Método para determinar la posición de un elemento arrastrado por el eje de accionamiento de un motor de corriente continua dentro de un recorrido predeterminado entre dos posiciones de bloqueo que limitan el recorrido,
mediante el análisis del rizado contenido en la corriente del inducido, en el que se realiza una normalización del sistema cuando el elemento arrastrado se mueve a una posición de bloqueo definida, caracterizado porque, cuando el elemento arrastrado se mueve hacia una posición de bloqueo, se corta la alimentación de corriente del motor de corriente continua antes de que alcance la posición de bloqueo definida por el sistema y en consecuencia conmuta a un funcionamiento como generador con el fin de observar la parada del motor de corriente continua a través de la señal de corriente generada por el motor de corriente continua, y cuando se ha detectado la parada del inducido como consecuencia del corte de la alimentación de corriente al motor de corriente continua, después de un intervalo de tiempo predeterminado se vuelve a conectar activamente la alimentación de corriente para finalmente llevar al elemento arrastrado a su posición de bloqueo, y de manera que después de que el elemento arrastrado se ha llevado a su posición de bloqueo definida mecánicamente, se realiza una normalización del sistema de esta posición de bloqueo
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP01/06221.
Solicitante: LEOPOLD KOSTAL GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: PATENTABTEILUNG, WIESENSTRASSE 47,58507 LUDENSCHEID.
Inventor/es: OTTE, STEFAN.
Fecha de Publicación: .
Fecha Concesión Europea: 21 de Abril de 2010.
Clasificación Internacional de Patentes:
- G05B19/418N1
- H02H7/085B
- H02P7/29R
Clasificación PCT:
- E05F15/16
- H02H7/085 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02H CIRCUITOS DE PROTECCION DE SEGURIDAD (indicación o señalización de condiciones de trabajo indeseables G01R, p. ej. G01R 31/00, G08B; localización de defectos a lo largo de las líneas G01R 31/08; dispositivos de protección H01H). › H02H 7/00 Circuitos de protección de seguridad especialmente adaptados para máquinas o aparatos eléctricos de tipos especiales o para la protección seccional de sistemas de cables o líneas, y efectuando una conmutación automática en el caso de un cambio indeseable de las condiciones normales de trabajo (asociación estructural de órganos de protección con máquinas o aparatos específicos y su protección sin desconexión automática, ver la subclase correspondiente a tales máquinas o aparatos). › contra una carga excesiva.
- H02P7/29 H02 […] › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 7/00 Disposiciones para la regulación o el control de la velocidad o el par de motores eléctricos de corriente continua. › utilizando la modulación por impulsos.
Clasificación antigua:
- E05F15/16
- G05B19/42 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Sistemas de registro y de reproducción, es decir, en los que el programa es registrado a partir de un ciclo de operaciones, p. ej. el ciclo de operaciones está controlado a mano, y a continuación este registro es reproducido en la misma máquina.
- H02H7/085 H02H 7/00 […] › contra una carga excesiva.
- H02P5/17
Fragmento de la descripción:
Método para determinar la posición de un elemento arrastrado por el eje de accionamiento de un motor de corriente continua.
La invención se refiere a un método para determinar la posición de un elemento arrastrado por el eje de accionamiento de un motor de corriente continua dentro de un recorrido predeterminado entre dos posiciones de bloqueo que limitan el recorrido, mediante el análisis del rizado (ripple en inglés) contenido en la corriente del inducido, en el que se realiza una normalización del sistema cuando el elemento arrastrado se mueve a una posición de bloqueo definida.
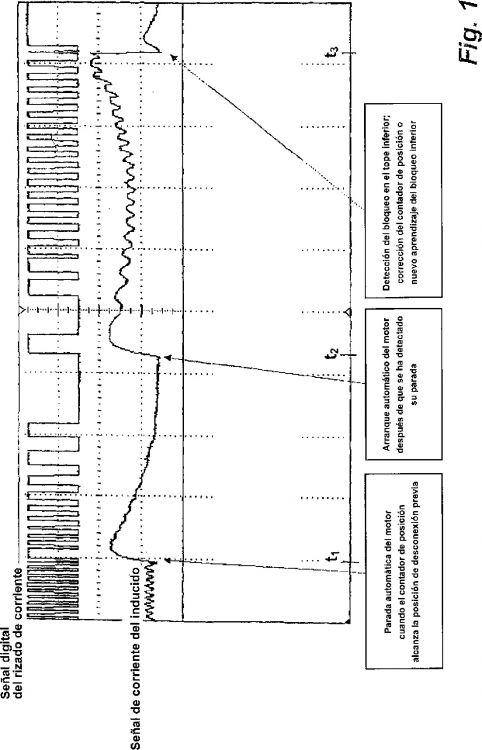
La señal de corriente del inducido de un motor de corriente continua comprende una componente continua y una componente alterna superpuesta con la componente continua. Cuando funciona el motor de corriente continua, la componente alterna se genera por la interacción, entre el imán (el campo), el devanado del inducido y el conmutador del motor de corriente continua. Esto se manifiesta por una breve variación de la tensión inducida, de lo cual resulta la ondulación de la señal de corriente del inducido. Los picos de corriente contenidos en la señal de corriente del inducido -llamados a continuación, rizado de corriente- y generados del modo descrito aparecen en una revolución del inducido con una frecuencia que depende del número de delgas del colector. Por ejemplo, si el colector del inducido tiene diez delgas, entonces se encontrarán 10 rizos en la señal de salida del inducido. La cuenta del rizado puede proporcionar información sobre la posición angular actual del inducido del motor de corriente continua y de este modo sobre la del elemento accionado por el mismo, dentro de su intervalo de movimiento predeterminado. Con este objeto y para poder realizar la cuenta correspondiente, se digitaliza la señal analógica del inducido.
Puesto que se conoce el número de rizos de corriente que debe generar el motor de corriente continua para cubrir la carrera entre las dos posiciones de bloqueo que limitan el recorrido, es posible determinar la posición del elemento accionado mediante la cuenta de los rizos de corriente. Los métodos de este tipo se utilizan por ejemplo en el automóvil para el control de un mecanismo de accionamiento como los que por ejemplo están previstos para el elevalunas y/o para el techo corredizo. Para poder captar la posición de por ejemplo el vidrio, es esencial que cuando se cierre sea posible desconectar la protección contra atrape. Esta desconexión es necesaria para que el vidrio se mueva hacia su posición de bloqueo superior y pueda atravesar las juntas de estanqueidad allí previstas, sin que se produzca la desconexión del motor debido al aumento de carga. En caso de un error en la cuenta de los rizos de corriente para la determinación de la posición del vidrio, podía conectarse o desconectarse prematuramente la protección contra atrape.
Con el fin de aumentar la precisión al determinar la posición del elemento móvil, por ejemplo de un vidrio de ventana de un vehículo automóvil, se realiza una normalización del sistema ó renormalización, cuando la ventana se ha movido a su posición superior puesto que entonces se produce la coincidencia de hecho entre la posición real del vidrio y la posición de bloqueo definida mecánicamente. Mediante esta renormalización, el contador de rizos de corriente se pone de nuevo a cero, de manera que se evita la suma de errores sobre un periodo de tiempo prolongado. Aunque mediante estas acciones de renormalización se puede realizar fundamentalmente una determinación de posición precisa del elemento arrastrado y durante un período de tiempo largo, sin embargo un renormalización de este tipo es insuficiente cuando después del movimiento del elemento arrastrado hacia la posición de bloqueo, la posición de bloqueo prevista para la renormalización no coincide de hecho con la posición de bloqueo definida mecánicamente. Este caso ocurre por ejemplo cuando al moverse el elemento arrastrado hacia la posición de bloqueo, éste rebota antes del bloqueo que sirve de tope. El elemento arrastrado se encuentra entonces en una posición (posición EFECTIVA) que es distinta de la posición de bloqueo definida mecánicamente (posición REQUERIDA). Si ahora se normaliza de nuevo el sistema respecto de esta posición del elemento arrastrado suponiendo que el elemento arrastrado se encuentre en su posición de bloqueo definida mecánicamente, entonces la post-normalización es falsa y también las cuentas realizadas a continuación. En consecuencia la determinación de la posición del elemento arrastrado es imprecisa y en particular, cada una de las posiciones en el rango de movimiento del elemento arrastrado no se alcanza con la precisión necesaria, pues como consecuencia del hecho accidental del rebote del elemento arrastrado la normalización tiene lugar tomando como base supuestos distintos. La consecuencia de un comportamiento de este tipo es que un método según la técnica conocida solamente se puede aplicar cuando las imprecisiones mecánicas que ocurren en el movimiento hacia la posición de bloqueo son despreciables.
La publicación DE 196 19 971 A1 muestra un método para determinar la posición de un elemento arrastrado por el eje de accionamiento de un motor de corriente continua dentro de un rango de movimiento predeterminado mediante el análisis del rizado de corriente contenido en la corriente del inducido.
El documento de modelo de utilidad DE 295 10 688 U1 da a conocer un dispositivo de control para un elevalunas en el que poco antes de alcanzar la posición de cierre total del vidrio de ventana tiene lugar la desconexión del accionamiento, así como la consiguiente conexión del mismo para un breve movimiento final y alcanzar la posición final sin carga significativa por choque.
Partiendo del estado de la técnica presentado, el objeto de la invención consiste en desarrollar un método según el antecedente mencionado al principio de modo que el error que se produce en la técnica conocida al post-normalizar en una posición de bloqueo sea despreciable también en aplicaciones en las que el elemento arrastrado se mueve con energía cinética elevada.
Según la invención este objeto se consigue de manera que cuando el elemento arrastrado se mueve hacia una posición de bloqueo, se corta la alimentación de corriente del motor de corriente continua antes de que alcance la posición de bloqueo definida por el sistema y en consecuencia conmuta a un funcionamiento como generador con el fin de observar la parada del motor de corriente continua a través de la señal de corriente generada por el motor de corriente continua, y cuando se ha detectado la parada del inducido como consecuencia del corte de la alimentación de corriente al motor de corriente continua, después de un intervalo de tiempo predeterminado se vuelve a conectar activamente la alimentación de corriente para finalmente llevar al elemento arrastrado a su posición de bloqueo, y de manera que después de que el elemento arrastrado se ha llevado a su posición de bloqueo definida mecánicamente, se realiza una normalización del sistema de esta posición de bloqueo.
En el método según la invención, el elemento arrastrado no se mueve a la posición de bloqueo con toda su energía cinética. Más bien, con el fin de reducir la energía cinética del elemento arrastrado, se corta la alimentación de corriente del motor de corriente continua que acciona al elemento arrastrado antes de que alcance la posición de bloqueo definida por el sistema. En el contexto de estas realizaciones el concepto de "cortar la alimentación de corriente" significa que el motor no está alimentado activamente con tensión. Esto puede realizarse mediante la desconexión del motor de corriente continua, o también mediante la conmutación o el cortocircuito del mismo en un modo de funcionamiento como generador. Después de un intervalo de tiempo predeterminado que puede variar en función de otros factores, se vuelve a conectar la alimentación de corriente del motor, de modo que ahora el elemento arrastrado se mueve a la posición de bloqueo definida mecánicamente con una energía cinética reducida. Después de que el elemento arrastrado se encuentra en su posición de bloqueo definida mecánicamente, entonces se realiza la normalización o post-normalización del sistema prescrita. Así la renormalización tiene lugar en un momento en que está asegurado que el elemento arrastrado se encuentra con la precisión suficiente en su posición de bloqueo definida mecánicamente. Mediante el corte de corriente del motor de corriente continua a poca distancia de llegar a la posición de bloqueo efectiva y la nueva conexión de la corriente,...
Reivindicaciones:
1. Método para determinar la posición de un elemento arrastrado por el eje de accionamiento de un motor de corriente continua dentro de un recorrido predeterminado entre dos posiciones de bloqueo que limitan el recorrido, mediante el análisis del rizado contenido en la corriente del inducido, en el que se realiza una normalización del sistema cuando el elemento arrastrado se mueve a una posición de bloqueo definida, caracterizado porque, cuando el elemento arrastrado se mueve hacia una posición de bloqueo, se corta la alimentación de corriente del motor de corriente continua antes de que alcance la posición de bloqueo definida por el sistema y en consecuencia conmuta a un funcionamiento como generador con el fin de observar la parada del motor de corriente continua a través de la señal de corriente generada por el motor de corriente continua, y cuando se ha detectado la parada del inducido como consecuencia del corte de la alimentación de corriente al motor de corriente continua, después de un intervalo de tiempo predeterminado se vuelve a conectar activamente la alimentación de corriente para finalmente llevar al elemento arrastrado a su posición de bloqueo, y de manera que después de que el elemento arrastrado se ha llevado a su posición de bloqueo definida mecánicamente, se realiza una normalización del sistema de esta posición de bloqueo.
2. Método según la reivindicación 1, caracterizado porque la normalización del sistema tiene lugar en función de los movimientos del elemento arrastrado que se han realizado antes del inicio del movimiento a la posición de bloqueo del elemento arrastrado.
3. Método según la reivindicación 1 ó la 2, caracterizado porque cuando el recorrido del movimiento del elemento arrastrado es inclinado o esencialmente vertical, el movimiento del elemento arrastrado a la posición de bloqueo inferior tiene lugar del modo reivindicado.
4. Aplicación del método según una de las reivindicaciones de la 1 a la 3 para determinar, en un vehículo automóvil, la posición de un elemento arrastrado mediante un mecanismo de accionamiento eléctrico, por ejemplo para determinar la posición de un vidrio de ventana, de un techo corredizo o de un asiento.
5. Aplicación según la reivindicación 4 caracterizada porque el elemento arrastrado es un vidrio de ventana y se utiliza el método para mover el vidrio de ventana a la posición de bloqueo inferior.
Patentes similares o relacionadas:
 PROCEDIMIENTO PARA EL CONTROL AUTOMATIZADO DE UNA INSTALACION INDUSTRIAL Y SISTEMA DIRECTOR DE PROCESOS PARA LA EJECUCION DEL PROCEDIMIENTO, del 13 de Abril de 2010, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para el control automatizado de una instalación industrial , del tipo que comprende una pluralidad de componentes de la instalación, que están conectados […]
PROCEDIMIENTO PARA EL CONTROL AUTOMATIZADO DE UNA INSTALACION INDUSTRIAL Y SISTEMA DIRECTOR DE PROCESOS PARA LA EJECUCION DEL PROCEDIMIENTO, del 13 de Abril de 2010, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para el control automatizado de una instalación industrial , del tipo que comprende una pluralidad de componentes de la instalación, que están conectados […]
 SISTEMA DE COMUNICACIONES Y UNIDADES SECUNDARIAS Y REPETIDORAS PARA EL MISMO, del 11 de Diciembre de 2009, de OMRON CORPORATION: Un sistema de comunicaciones, que comprende:
una unidad principal que es un controlador programable que tiene una función de comunicación;
al menos una unidad secundaria […]
SISTEMA DE COMUNICACIONES Y UNIDADES SECUNDARIAS Y REPETIDORAS PARA EL MISMO, del 11 de Diciembre de 2009, de OMRON CORPORATION: Un sistema de comunicaciones, que comprende:
una unidad principal que es un controlador programable que tiene una función de comunicación;
al menos una unidad secundaria […]
 SISTEMAS Y MÉTODOS DE SEGUIMIENTO DEL RENDIMIENTO DE UN SISTEMA PARA PANELES, del 2 de Junio de 2011, de ROBERT BOSCH GMBH: Método de monitoreo del funcionamiento de un sistema de movimiento de panel , donde el método comprende: monitorear un parámetro que tiene una relación […]
SISTEMAS Y MÉTODOS DE SEGUIMIENTO DEL RENDIMIENTO DE UN SISTEMA PARA PANELES, del 2 de Junio de 2011, de ROBERT BOSCH GMBH: Método de monitoreo del funcionamiento de un sistema de movimiento de panel , donde el método comprende: monitorear un parámetro que tiene una relación […]
 SISTEMA DE CONTROL DE MOTOR, del 16 de Febrero de 2011, de YORKSHIRE TECHNOLOGY LIMITED: Un sistema de control de motor para un mecanismo de cierre comprende circuitería eléctrica que incluye detectores de límites primero y segundo, un detector térmico […]
SISTEMA DE CONTROL DE MOTOR, del 16 de Febrero de 2011, de YORKSHIRE TECHNOLOGY LIMITED: Un sistema de control de motor para un mecanismo de cierre comprende circuitería eléctrica que incluye detectores de límites primero y segundo, un detector térmico […]
 APARATO DE SUPERVISION, del 28 de Enero de 2010, de GUNTON, BRUCE STANLEY: Aparato de supervisión para supervisar la corriente de accionamiento eléctrico para un motor eléctrico (12, 12A), que comprende medios de generación […]
APARATO DE SUPERVISION, del 28 de Enero de 2010, de GUNTON, BRUCE STANLEY: Aparato de supervisión para supervisar la corriente de accionamiento eléctrico para un motor eléctrico (12, 12A), que comprende medios de generación […]
Dispositivo de control del motor para mover un cierre de lamas de una pérgola o similar, del 15 de Abril de 2020, de Teleco Automation S.R.L: Un dispositivo de control de al menos un motor para mover un cierre de lamas de una pérgola , siendo dicho dispositivo de control del […]
Accionamiento para movimiento traslacional o giratorio de cargas, del 29 de Mayo de 2019, de Tousek Ges M.B.H: Accionamiento para movimiento traslacional o giratorio de cargas, tales como portales correderos, puertas y portales giratorios, portales elevables, barreras, […]
Aparato para cocinar, del 16 de Octubre de 2018, de BSH HAUSGERÁTE GMBH: Aparato para cocinar, en particular aparato para cocinar para montaje empotrado en altura, con al menos - una mufla que delimita una cámara de cocción , […]