PROCEDIMIENTO DE MEDICION DE UNA VIA FERREA.
Procedimiento de medición de una vía (9) con dos vehículos de medida (1,
2) trasladables independientemente uno de otro, en el que se posiciona cada vez un primer vehículo de medida móvil (1) en uno de los dos puntos extremos de un tramo (28) de vía férrea a medir y se determinan las coordenadas relativas a la posición local del segundo vehículo de medida (2) estacionario durante el proceso de medición, y se posiciona una recta de referencia (14) en forma de un rayo de medida óptico entre los dos vehículos de medida (1, 2), después de lo cual se traslada el primer vehículo de medida (1) en dirección al vehículo de medida estacionario opuesto (2) y se registra como valor de medida de corrección cualquier variación de posición de una unidad de recepción (13) del primer vehículo de medida (1) con relación a la recta de referencia (14), caracterizado porque al comienzo de cada ciclo de medida se obtiene utilizando un receptor GPS (19) la posición relativa del vehículo de medida estacionario (2) con respecto a una estación de referencia GPS (29) conocida en un sistema de coordenadas terrestres, contigua al tramo (28) de vía férrea a medir e instalada en posición localmente fija, y, tomando como base los datos de posición obtenidos, se apunta la recta de referencia (14) hacia el vehículo de medida móvil (1) y se realiza la medición de la vía férrea por avance del vehículo de medida móvil (1)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E00890003.
Solicitante: FRANZ PLASSER BAHNBAUMASCHINEN- INDUSTRIEGESELLSCHAFT M.B.H..
Nacionalidad solicitante: Austria.
Dirección: JOHANNESGASSE 3,1010 WIEN.
Inventor/es: THEURER, JOSEF, LICHTBERGER, BERNHARD DR..
Fecha de Publicación: .
Fecha Solicitud PCT: 5 de Enero de 2000.
Fecha Concesión Europea: 21 de Octubre de 2009.
Clasificación Internacional de Patentes:
- G01S1/00S2C1
- G01S17/88 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › Sistemas de lidar, especialmente adaptados para aplicaciones específicas.
- G01S5/14S1B5
Clasificación PCT:
- E01B35/06 CONSTRUCCIONES FIJAS. › E01 CONSTRUCCION DE CARRETERAS, VIAS FERREAS O PUENTES. › E01B VIAS FERREAS; HERRAMIENTAS PARA VIAS FERREAS; MAQUINAS PARA LA CONSTRUCCION DE VIAS FERREAS DE CUALQUIER TIPO (dispositivos descarriladores o para situar los vehículos en la vía, frenos de vía o dispositivos ralentizadores B61K; retirada de materia indeseable de las vías de ferrocarril, control de la vegetación, applicación de líquidos E01H). › E01B 35/00 Aplicaciones de los aparatos o dispositivos de medida para la construcción de vías (aparatos para locomotoras o vagones para indicar o registrar secciones de vía en mal estado B61K 9/00; medida de ángulos, de dimensiones lineales o de irregularidades en general G01B, G01C). › para medir las irregularidades en el sentido longitudinal.
- G01S17/88 G01S 17/00 […] › Sistemas de lidar, especialmente adaptados para aplicaciones específicas.
- G01S5/14 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
Clasificación antigua:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Procedimiento de medición de una vía férrea.
La invención concierne a un procedimiento de medición de una vía férrea con dos vehículos de medida trasladables independientemente uno de otro, en el que se posiciona cada vez un primer vehículo de medida móvil en uno de los dos puntos extremos de un tramo de vía férrea a medir y se determinan las coordenadas relativas a la posición local del segundo vehículo de medida estacionario durante el proceso de medida, y se posiciona una recta de referencia en forma de un rayo de medida óptico entre los dos vehículos de medida, después de lo cual se traslada el primer vehículo de medida en dirección al vehículo de medida estacionario opuesto y se registra como valor de medida de corrección cualquier variación de posición de una unidad de recepción del primer vehículo de medida con relación a la recta de referencia.
Un procedimiento de esta clase se describe con más detalle en el artículo "Einsatzerfahrungen mit dem Gleisvormesswagen EM-SAT" en la revista técnica "Der Eisenbahningenieur", 46 (1995) 5, páginas 314 a 318. El desarrollo de la medición se produce de manera cíclica. El vehículo de medida (también denominado satélite) estacionario durante la medición de la vía y equipado con un emisor de láser es trasladado en la dirección de trabajo hasta un punto fijo inmediato siguiente geodésicamente acotado que, en el caso normal, se encuentra sobre un poste de la catenaria eléctrica. El emisor de láser es ajustado con respecto al punto fijo adyacente en la dirección transversal a la vía y es llevado así a una posición nominal exacta. A continuación, se ajusta el emisor de láser, con ayuda de un catalejo fijado a éste, a un receptor que se encuentra sobre el vehículo de medida móvil (o máquina principal). El vehículo de medida móvil está situado aquí con el eje de medida exactamente en un punto fijo que ha sido previamente identificado con ayuda de tinta en el pie del carril. Este posicionamiento exacto es facilitado por una cámara de vídeo que muestra el pie del carril y la rueda del eje de medida.
La medición propiamente dicha del tramo de vía férrea se inicia con el avance del vehículo móvil sobre la vía férrea, midiéndose y almacenándose la posición del rayo láser con relación a la posición real de la vía férrea a distancias de 20 centímetros. Con ayuda de un programa informático especial se pueden calcular las alturas de flecha nominales para la dirección y la altura a partir de los datos geométricos contenidos en un plano de amojonamiento de la vía férrea. Son necesarios para ello únicamente el ingreso de la geometría de la vía férrea y la posición de los puntos fijos. Estos valores sirven para la comparación con las alturas de flecha medidas, dando como resultado su diferencia los valores de corrección para altura y dirección. La medición del tramo de vía férrea se finaliza tan pronto como el vehículo de medida móvil haya alcanzado al vehículo de medida estacionario. Mientras se hace que el vehículo de medida estacionario avance hasta el punto de medida inmediato siguiente para realizar el siguiente proceso de medida, se efectúa un cálculo de los valores de desplazamiento y de elevación para el tramo medido de la vía férrea. Los valores de corrección obtenidos pueden almacenarse en disquete para ingresarlos, por ejemplo, en una máquina bateadora y ejecutarlos automáticamente para la corrección exacta de la posición de la vía férrea.
Se conoce por el documento US 5 493 499 otro procedimiento de medición de una vía férrea en el que se instalan dos unidades de medida trasladables sobre la vía férrea en dos puntos extremos de un tramo de vía férrea a medir y se define la posición relativa de las mismas con respecto al punto fijo de la vía férrea. A continuación, se traslada paso a paso una de los dos unidades de medida en dirección a la otra unidad de medida, realizándose durante cada interrupción del movimiento de traslación, para efectuar un proceso de medida, una comparación de los datos de medida de la posición real de la vía con los datos de medida de la posición nominal, y calculándose y almacenándose un valor diferencia correspondiente. Mediante la recepción de un telegrama de posición de satélites topográficos (GPS) se determina aquí la posición de las dos unidades de medida una con relación a otra en un sistema de coordenadas. En cada interrupción del movimiento de traslación de la segunda unidad de medida en su viaje de medida en dirección a la unidad de medida opuesta se averigua la respectiva variación de posición relativa mediante la recepción de otro telegrama de posición de satélites topográficos.
Más detalles sobre los procedimientos citados para la medición de vías férreas se encuentran descritos también en un artículo "Stand der Llngsehnenvermessung mittels EM-SAT oder GPS" en la revista técnica "Der Eisenbahningenieur" 46 (1995) 8, páginas 560 a 563.
Según un artículo "GPS-based data collection" en la revista "Railway Age", diciembre de 1994, páginas 66 y 67, es conocido el recurso de utilizar GPS para analizar tramos de vía férrea que requieran un trabajo de reacondiciona-miento.
Por último, se describen en el documento US 4 812 991 un procedimiento y un dispositivo para la determinación rápida y exacta de las coordenadas de posición de un receptor móvil con relación a un receptor fijamente instalado.
El problema de la presente invención reside ahora en la creación de un procedimiento descrito con detalle al principio que, conservando una alta precisión de medida, haga posible un progreso más rápido del trabajo.
Según la invención, este problema se resuelve con un procedimiento de la clase genérica indicada por el hecho de que al comienzo de cada ciclo de medida se localiza mediante la utilización de un receptor GPS la posición relativa del vehículo de medida estacionario con respecto a una estación de referencia GPS conocida en el sistema de coordenadas terrestres, contigua al tramo de vía férrea a medir e instalada en posición localmente fija, y, tomando como base los datos de posición obtenidos, se apunta la recta de referencia hacia el vehículo de medida móvil y se realiza la medición de la vía férrea por avance del vehículo de medida móvil.
Un procedimiento de medida de esta clase tiene la ventaja especial de que se suprime el ajuste costoso en tiempo del emisor de láser a un punto fijo contiguo. Además, se ahorra así también el posicionamiento igualmente costoso en tiempo de ambos vehículos de medida al principio y al final, respectivamente, del tramo de vía férrea a medir. Asimismo, los tramos de vía férrea pueden medirse por superposición evitando una línea poligonal. Por último, los datos de posición medidos se pueden emplear también de manera ventajosa para la creación de un plano de posición de la vía férrea exactamente definido en sus coordenadas.
En lo que sigue se describe la invención con más detalle ayudándose de un ejemplo de realización representado en el dibujo.
Muestran:
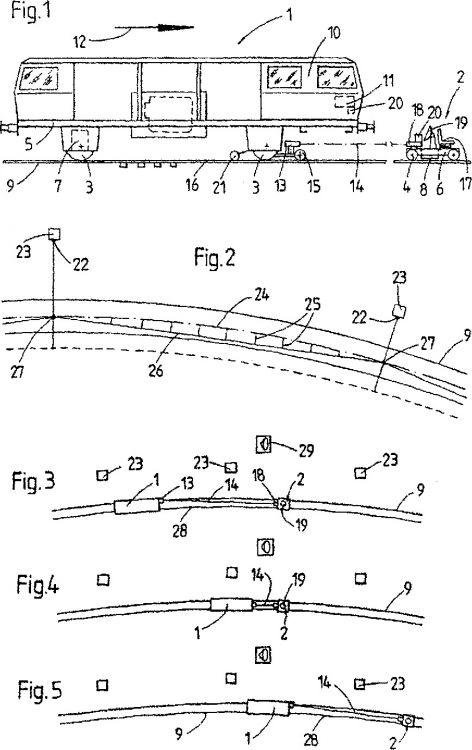
La figura 1, un alzado lateral de dos vehículos de medida para medir un tramo de vía férrea,
La figura 2, una representación esquemática de una posición nominal de la vía férrea y de una recta de referencia formada por un rayo láser de los dos vehículos de medida, y
Las figuras 3 a 5, sendas representaciones fuertemente simplificadas de las diferentes posiciones de los dos vehículos de medida durante la medición de la vía férrea.
Una máquina principal visible en la figura 1 se denomina en lo que sigue vehículo de medida móvil 1, ya que éste se mueve durante la medición de la vía férrea con relación a un segundo vehículo de medida estacionario 2, denominado también satélite. Ambos vehículos de medida 1, 2 presentan un bastidor de máquina 5, 6 apoyado sobre mecanismos de rodadura 3, 4 y pueden ser trasladados independientemente uno de otro sobre una vía férrea 9 por medio de un respectivo accionamiento de rodadura propio 7, 8. En una cabina de conducción 10 del vehículo de medida móvil 1 se encuentra una unidad de control y cálculo 11. Con una flecha 12 se indica la dirección de trabajo del vehículo de medida móvil 1 durante la medición de la vía férrea. Por fuera de los dos mecanismos de rodadura 3, 4 y por debajo del extremo delantero de la máquina se encuentra una unidad de recepción 13 formada por un sistema de evaluación rápida de imágenes y destinada a localizar una recta de referencia 14 formada por un rayo láser. La unidad de recepción 13 fijada articuladamente...
Reivindicaciones:
1. Procedimiento de medición de una vía (9) con dos vehículos de medida (1, 2) trasladables independientemente uno de otro, en el que se posiciona cada vez un primer vehículo de medida móvil (1) en uno de los dos puntos extremos de un tramo (28) de vía férrea a medir y se determinan las coordenadas relativas a la posición local del segundo vehículo de medida (2) estacionario durante el proceso de medición, y se posiciona una recta de referencia (14) en forma de un rayo de medida óptico entre los dos vehículos de medida (1, 2), después de lo cual se traslada el primer vehículo de medida (1) en dirección al vehículo de medida estacionario opuesto (2) y se registra como valor de medida de corrección cualquier variación de posición de una unidad de recepción (13) del primer vehículo de medida (1) con relación a la recta de referencia (14), caracterizado porque al comienzo de cada ciclo de medida se obtiene utilizando un receptor GPS (19) la posición relativa del vehículo de medida estacionario (2) con respecto a una estación de referencia GPS (29) conocida en un sistema de coordenadas terrestres, contigua al tramo (28) de vía férrea a medir e instalada en posición localmente fija, y, tomando como base los datos de posición obtenidos, se apunta la recta de referencia (14) hacia el vehículo de medida móvil (1) y se realiza la medición de la vía férrea por avance del vehículo de medida móvil (1).
Patentes similares o relacionadas:
CARRIL PARA VEHÍCULOS PESADOS CON MEDIOS DE COMPROBACIÓN DE VEHÍCULO VACÍO, del 18 de Junio de 2020, de INFORMATICA EL CORTE INGLES, S.A.: 1. Carril para vehículos pesados con medios de comprobación de vehículo vacío, caracterizado porque está constituido a partir de un carril para paso de vehículos […]
Método de medición de una distancia, del 17 de Junio de 2020, de The Chugoku Electric Power Co., Inc: Un método de medición de una distancia que comprende: instalar un miembro de referencia en una superficie de un primer miembro metálico (P1), e instalar un miembro […]
Dispositivo para controlar un relleno de separación, vehículo que comprende dicho dispositivo y método de control asociado, del 29 de Abril de 2020, de ALSTOM Transport Technologies: Un dispositivo para controlar un relleno de separación con el que se va a equipar una puerta de un vehículo ferroviario , dicho dispositivo de control comprende: […]
Procedimiento y sistema para evitar mal funcionamiento en llamadas, del 21 de Agosto de 2019, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un procedimiento para evitar errores de operación en llamadas por un teléfono móvil, mediante el cual el procedimiento comprende las etapas de: detectar continuamente […]
Método y aparato para la formación de imágenes fantasma computacional, del 24 de Julio de 2019, de BAE SYSTEMS PLC: Un aparato de formación de imágenes fantasma computacional que comprende una primera fuente de radiación electromagnética y un sistema […]
Procedimiento de adquisición de las coordenadas de un punto de activación de un proyectil y control de disparo que implementa un tal procedimiento, del 20 de Diciembre de 2017, de NEXTER SYSTEMS: Procedimiento de adquisición de las coordenadas de un punto de activación (P) de un proyectil o de una ráfaga de proyectiles en trayectoria y […]
Sensor mejorado de telémetro de láser, del 8 de Noviembre de 2017, de OSI Optoelectronics: Un sistema para determinar la forma tridimensional de un vehículo , comprendiendo el sistema: un sensor de distancia que comprende un transmisor de […]
Técnicas para posicionar un vehículo, del 8 de Noviembre de 2017, de KONECRANES GLOBAL CORPORATION: Un sistema para determinar una ubicación (x_v, y_v) de un vehículo en un entorno provisto de una pluralidad de puntos de referencia (11, 11') cuya […]