DISPOSITIVO AUTOMATICO DE RECEPCION DE ARTICULOS.
Dispositivo automático de recepción de artículos, particularmente para almacenar envases en un almacén (10) de artículos automático que presenta numerosos puntos de almacenaje y un manipulador de almacenaje que transporta los envases,
con un dispositivo (21) de transporte que parte de un punto (20) de introducción, caracterizado porque el dispositivo (21) de transporte lleva a una rampa (26) helicoidal en la que se realiza una orientación de los envases y detrás de la cual está previsto un dispositivo (53) de selección
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07114704.
Solicitante: GEBR. WILLACH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: STEIN 2,53809 RUPPICHTEROTH.
Inventor/es: SCHUMACHER, HERIBERT, WILLACH,JENS, FEINDT,AREND.
Fecha de Publicación: .
Fecha Solicitud PCT: 21 de Agosto de 2007.
Fecha Concesión Europea: 14 de Octubre de 2009.
Clasificación Internacional de Patentes:
- B65G1/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 1/00 Almacenamiento de objetos, individualmente o con un cierto orden, en almacenes o depósitos (combinaciones de transportadores en almacenes, tiendas o talleres, B65G 37/00; apilado de objetos B65G 57/00; sacado de objetos de pilas B65G 59/00; máquinas de carga B65G 65/02). › mecánicos.
- B65G1/04B
- B65G1/04N
- B65G11/06A
Clasificación PCT:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Dispositivo automático de recepción de artículos.
La invención se refiere a un dispositivo automático de recepción de artículos, especialmente para almacenar envases en un almacén de artículos automático, que presenta numerosos puntos de almacenaje y un manipulador de almacenaje que transporta los envases, con un dispositivo de transporte que parte de una tolva de introducción.
El documento EP 1 407 984 B1 (Willach) da a conocer un dispositivo automático de recepción de artículos según el preámbulo de la reivindicación 1 y describe un almacén de estantes con estantes de extracción. El almacén de estantes sirve para el alojamiento de envases, que por ejemplo pueden contener medicamentos. El almacén de estantes contiene un dispositivo de transporte, que puede desplazarse a lo largo de un pasillo, a ambos lados del cual se encuentran estantes de extracción. El dispositivo de transporte lleva un manipulador, que puede extraer los envases de uno de los estantes de extracción y transportarlos a un dispositivo de recepción al que está conectada a continuación una cinta transportadora. Durante el almacenamiento de envases en el almacén de estantes, los envases se insertan manualmente en el estante de transferencia de artículos, el manipulador los agarra y se transportan a un punto de alma-cenaje.
El documento EP 0 620 528 B2 (Schausten) describe un dispositivo automático de recepción de artículos con separación y clasificación previa automática de envases introducidos. Un código de barras aplicado sobre los envases se lee con un escáner para identificar el envase.
El documento DE 10 2004 012 133 A1 (Indunorm) describe un dispositivo automático de recepción de artículos con una entrada en forma de tolva, un transportador escalonado conectado a continuación a la misma, que transporta los envases sobre una superficie de deposición horizontal, y una cámara que fotografía los envases situados sobre la superficie de deposición. Con ayuda de un procesamiento de imágenes se realiza una detección de los envases, incluyendo la posición y las dimensiones. Gracias a estos datos el envase puede depositarse en un punto de almacenaje adecuado de un dispositivo automático de almacenaje.
La invención se basa en el objetivo de crear un dispositivo automático de recepción de artículos para almacenar envases en un almacén de artículos automático que con medios técnicos sencillos pone los envases en una posición definida.
El dispositivo automático de recepción de artículos de la presente invención se define mediante la reivindicación 1. Según ésta, el dispositivo de transporte lleva a una rampa helicoidal, en la que se realiza una orientación de los envases y detrás de la cual está previsto un dispositivo de selección.
La invención posibilita la alimentación no ordenada de envases de diferentes formatos y tamaños con separación y orientación posterior, de modo que puede realizarse una identificación automática. La rampa helicoidal forma un elemento adecuado para poner envases en forma de paralelepípedo en una orientación adecuada. En una rampa helicoidal los envases se presionan contra la pared periférica, en la que se apoyan con una superficie principal. Cuando un envase llega de forma transversal sobre la rampa helicoidal, se acelera con más intensidad hacia abajo en el extremo que está dirigido al eje longitudinal de la rampa helicoidal debido a la mayor inclinación existente en el mismo, de modo que el envase experimenta un giro y a continuación se apoya con uno de sus lados longitudinales contra la pared periférica de la rampa helicoidal. La rampa helicoidal tiene además el efecto de que los envases se apoyan preferiblemente con su lado ancho sobre la base de la rampa helicoidal y no atraviesan la rampa helicoidal en vertical. Cuando dos envases llegan simultáneamente uno al lado de otro sobre la rampa helicoidal, el envase situado interiormente se acelera más que el envase exterior, por lo que adelanta al envase exterior y a continuación se apoya en la pared periférica. La rampa helicoidal es por tanto un medio adecuado para poner los envases en una orientación definida, concretamente con el lado ancho apoyado sobre la base, estando orientado un lado frontal del envase hacia delante y el otro lado frontal hacia atrás.
El dispositivo de selección desecha aquellos envases que no son adecuados para el almacenaje en un depósito de desechos, mientras que da vía libre a los otros envases para la transferencia al almacén de artículos automático.
Una separación poco precisa de los envases es posible mediante la acción conjunta del dispositivo de transporte y de la rampa helicoidal. A este respecto el dispositivo de transporte se acciona de modo que transporta un envase hasta un punto de entrega y realiza una etapa de transporte que va más allá del mismo sólo cuando un sensor al pie de la rampa helicoidal no detecta ningún envase. Sobre el dispositivo de transporte los envases pueden transportarse en primer lugar en una disposición y orden aleatorio. Cuando el sensor mencionado detecta que no existe ningún envase se hace que el dispositivo de transporte realice una etapa de transporte definida, mediante la cual el envase delantero se transfiere a la rampa helicoidal y se desliza sobre la misma hacia abajo. Mientras que el sensor detecte un envase no se realiza ningún accionamiento adicional del dispositivo de transporte. Si el sensor indica que ya no está presente ningún envase, el dispositivo de transporte se pone de nuevo en funcionamiento hasta que un envase delantero se transfiera a la rampa helicoidal.
Preferiblemente la rampa helicoidal tiene una base de rampa con líneas de inflexión, separando las líneas de inflexión superficies con diferentes inclinaciones entre sí. Al prever irregularidades en la base de rampa se empuja por impulsos un envase que se desliza hacia abajo, por lo que se mejora el efecto de orientación. Se evita que el envase se adhiera en cierto modo a la base de rampa sin girar a la posición correcta apoyándose en la pared lateral de la rampa.
Para separar los envases puede estar previsto un elemento de detención controlado que separa entre sí envases situados uno detrás de otro.
Como perfeccionamiento de la invención está prevista una estación de medición con un primer sensor para la medición de la altura y un segundo sensor para la medición de la anchura del envase. Un elemento de expulsión conduce el envase de vuelta sobre el dispositivo de transporte, cuando la altura medida es mayor que la anchura medida. De este modo se evita que un envase se transfiera con una orientación incorrecta al almacén de artículos. Un envase que se sitúa con orientación incorrecta se devuelve al dispositivo de transporte y atraviesa la rampa helicoidal una segunda vez. En cambio, envases cuya identificación no puede leerse por máquina se transportan al interior de un depósito de desechos.
En una estación de transferencia puede estar previsto un elemento de agarre que agarra los envases, que deposita los envases en un compartimento de recogida.
Desde el compartimento de recogida, el manipulador de almacenaje puede recoger los envases individualmente y transferirlos al almacén de estantes.
A continuación se explican con más detalle ejemplos de realización de la invención haciendo referencia a los dibujos.
Muestran:
la figura 1 una vista frontal en perspectiva de un almacén de artículos automático con dispositivo automático de recepción de artículos,
la figura 2 una vista de la estructura interior del dispositivo automático de recepción de artículos,
la figura 3 una vista desde arriba,
la figura 4 una vista en detalle del punto de entrega entre el dispositivo de transporte y la rampa helicoidal,
la figura 5 una vista de la rampa helicoidal,
la figura 6 una vista del compartimento de recogida, la estación de medición y la estación de transferencia,
la figura 7 otra vista de la zona inferior de la rampa helicoidal con representación del elemento de agarre y del depósito de desechos,
la figura 8 una representación de una parte de la rampa helicoidal en el estado desarrollado antes del montaje y
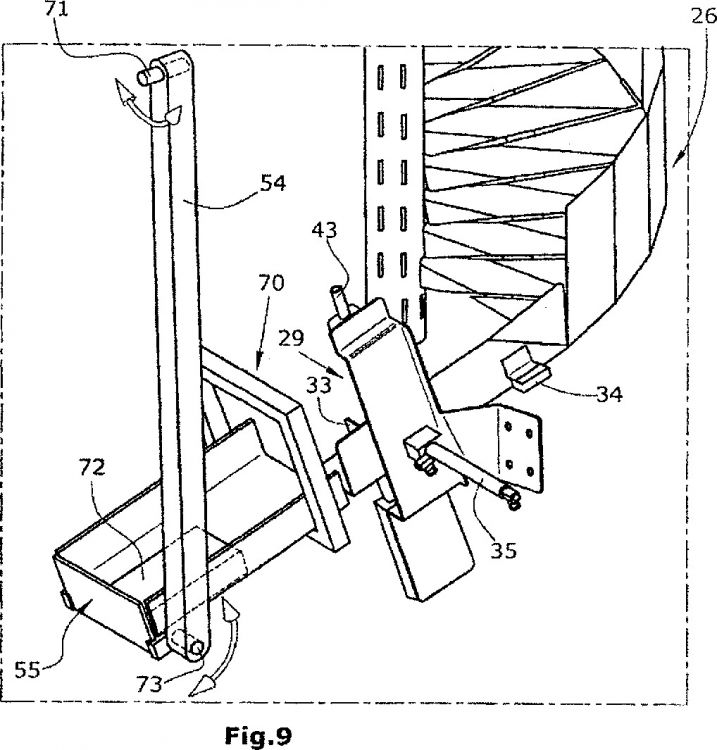
la figura 9, una forma de realización alternativa.
La figura 1 muestra un almacén 10 de artículos automático, que presenta numerosos estantes de extracción, que pueden desplazarse en un pasillo 11 central controlados mediante un ordenador. En la figura 1 no están representados...
Reivindicaciones:
1. Dispositivo automático de recepción de artículos, particularmente para almacenar envases en un almacén (10) de artículos automático que presenta numerosos puntos de almacenaje y un manipulador de almacenaje que transporta los envases, con un dispositivo (21) de transporte que parte de un punto (20) de introducción, caracterizado porque el dispositivo (21) de transporte lleva a una rampa (26) helicoidal en la que se realiza una orientación de los envases y detrás de la cual está previsto un dispositivo (53) de selección.
2. Dispositivo automático de recepción de artículos según la reivindicación 1, caracterizado porque el dispositivo (21) de transporte se acciona de modo que transporta un envase hasta un punto (24) de entrega y realiza un movimiento de transporte que va más allá del mismo sólo cuando un sensor (34) en la zona de extremo inferior de la rampa (26) helicoidal no detecta ningún envase.
3. Dispositivo automático de recepción de artículos según la reivindicación 1 ó 2, caracterizado porque la rampa (26) helicoidal presenta una base (31) de rampa con líneas (63, 64) de inflexión, delimitando las líneas de inflexión superficies con diferentes inclinaciones entre sí.
4. Dispositivo automático de recepción de artículos según la reivindicación 3, caracterizado porque la inclinación de las superficies (60a, 60b, 60c) se vuelve más pequeña a medida que aumenta la distancia con respecto al eje longitudinal vertical de la rampa helicoidal.
5. Dispositivo automático de recepción de artículos según una de las reivindicaciones 1 a 4, caracterizado porque el dispositivo (21) de transporte es una cinta (22) transportadora dotada de nervios (23).
6. Dispositivo automático de recepción de artículos según una de las reivindicaciones 1 a 5, caracterizado porque el dispositivo (21) de transporte presenta una rasqueta (28) para eliminar superposiciones de envases.
7. Dispositivo automático de recepción de artículos según una de las reivindicaciones 1 a 6, caracterizado porque está previsto un elemento (33) de detención controlado en el extremo inferior de la rampa helicoidal, que separa entre sí envases situados uno detrás de otro.
8. Dispositivo automático de recepción de artículos según una de las reivindicaciones 1 a 7, caracterizado porque está prevista una estación (29) de medición, con un primer sensor (43) para la medición de la altura y un segundo sensor (44) para la medición de la anchura del envase y porque un elemento (35) de expulsión conduce el envase de vuelta sobre el dispositivo (21) de transporte, cuando la altura medida es mayor que la anchura medida.
9. Dispositivo automático de recepción de artículos según una de las reivindicaciones 1 a 8, caracterizado porque en una estación (40) de transferencia está previsto un elemento (45) de agarre que agarra los envases, que puede depositar los envases en un compartimento (55) de recogida.
10. Dispositivo automático de recepción de artículos según una de las reivindicaciones 1 a 9, caracterizado porque está previsto al menos un dispositivo (50, 51) lector para leer una identificación en el envase y porque un envase con identificación leída con éxito se deposita en un compartimento (55) de recogida, al que puede acceder el manipulador de almacenaje.
11. Dispositivo automático de recepción de artículos según la reivindicación 10, caracterizado porque está previsto un elemento (56) de expulsión que, en el caso de que no pueda leerse ninguna identificación, deja caer el envase en un depósito (37) de desechos.
12. Dispositivo automático de recepción de artículos según una de las reivindicaciones 1 a 11, caracterizado porque el dispositivo (21) de transporte y la rampa (26) helicoidal están contenidos en un módulo (13) que está adaptado a los módulos del almacén (10) de artículos automático.
13. Dispositivo automático de recepción de artículos según una de las reivindicaciones 1 a 12, caracterizado porque está previsto al menos un dispositivo (70) lector para leer una identificación en el envase (72), y porque el dispositivo lector contiene una antena de alta frecuencia, que actúa conjuntamente con un transpondedor previsto en el envase.
14. Dispositivo automático de recepción de artículos según las reivindicaciones 10 y 13, caracterizado porque, en el extremo inferior de la rampa helicoidal, el compartimento (55) de recogida está dispuesto detrás de una estación (29) de medición en el transcurso del trayecto de transporte por gravedad y puede moverse de manera transversal al trayecto de transporte hasta una posición de recogida en función de la señal recibida por el dispositivo (70) lector.
Patentes similares o relacionadas:
Sistema de vías con nodos de intercomunicación dispuestos en la vertical y los vehículos con doble sistema de sustentación que discurren por ellas, del 27 de Julio de 2020, de RUIZ DE LARA REDONDO, José Antonio: Sistema de vías con nodos de intercomunicación dispuestos en la vertical y los vehículos con doble sistema de sustentación que discurren por ellas, capaces de trasladarse […]
Sistema de almacenamiento en estantería con realimentación de energía, del 1 de Julio de 2020, de KNAPP LOGISTIK AUTOMATION GMBH: Sistema de almacenamiento en estantería con al menos dos unidades de estantería (1a-1d), presentando cada unidad de estantería un dispositivo […]
Sistema de preparación para la expedición con un robot de transporte para pasar por debajo de estanterías individuales y carros de transporte, del 13 de Mayo de 2020, de KNAPP AG: Sistema de preparación para la expedición para preparar para la expedición artículos almacenados en un almacén con estanterías en bolsas de transporte con […]
Dispositivo para transferencia de artículos e instalación para transporte de artículos, del 6 de Mayo de 2020, de DAIFUKU CO., LTD.: Dispositivo para transferencia de artículos (2B, 2C) configurado para desplazar un artículo (W) a lo largo de una dirección de transferencia (Y) […]
Procedimiento de recogida de objetos con robots lanzadera, del 22 de Abril de 2020, de SOLYSTIC: Procedimiento de procesamiento de objetos en un centro logístico que comprende una zona de almacenaje de los objetos dividida en segmentos de almacenaje adyacentes […]
Procedimiento y dispositivo para el almacenamiento y recuperación o reubicación de contenedores en almacenes de gran altura, del 4 de Marzo de 2020, de AMOVA GmbH: Procedimiento para almacenar y recuperar o reubicar contenedores en almacenes de gran altura de una instalación de transbordo, […]
Dispositivo lanzadera de almacén, y sistemas y métodos que lo incorporan, del 4 de Marzo de 2020, de Majied, Fadi Mohammad Majed Hussain Abdel: Sistema para desplazar palés que comprende: una rejilla rectangular que comprende carriles laterales orientados a lo largo de un eje x y carriles ortogonales […]
Sistema de preparación para la expedición de artículos para la preparación de pedidos y de lotes, del 19 de Febrero de 2020, de KNAPP AG: Sistema de preparación para la expedición para preparar para la expedición artículos desde contenedores de almacenamiento en contenedores […]