PROCEDIMIENTO Y DISPOSITIVO PARA CREAR UN SISTEMA DE POSICIONAMIENTO MEDIANTE UNA RED.
Procedimiento para la creación de una red de dispositivos (402) con unidad de posicionamiento,
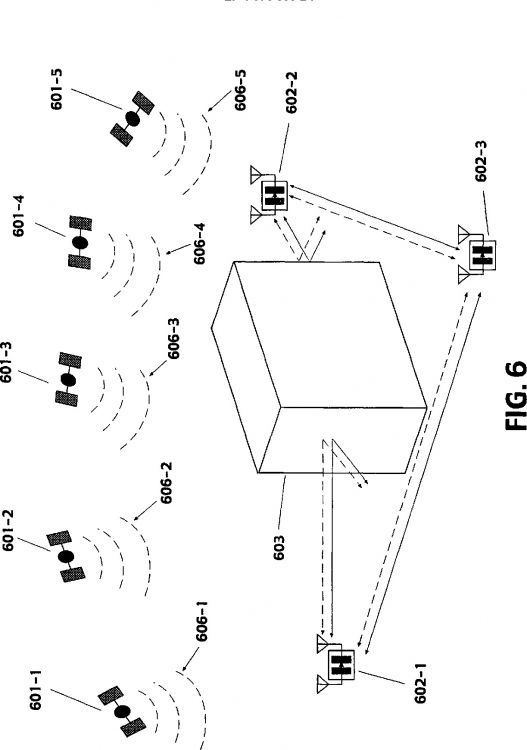
en el que -cada dispositivo (402) con unidad de posicionamiento recibe señales de posicionamiento (405, 406) permitiendo cada una de dichas señales de posicionamiento la realización de un cálculo de distancia, -cada dispositivo (402) con unidad de posicionamiento determina su posición a partir de un mínimo de tres de dichas señales de posicionamiento (405, 406), comportando la determinación un cálculo de distancia llevado a cabo por cada señal de posicionamiento, caracterizado porque, -cada dispositivo con unidad de posicionamiento transmite una señal de posicionamiento (405, 406) que puede ser utilizada por otros dispositivos con unidad de posicionamiento, y -cada dispositivo (402) con unidad de posicionamiento determina su posición a partir de cualquier combinación de un mínimo de tres señales de posicionamiento (405, 406) recibidas de otros dispositivos (402) con unidad de posicionamiento y satélites (401) de un Sistema de Satélites de Navegación Global
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/AU1999/000423.
Solicitante: LOCATA CORPORATION PTY LTD.
Nacionalidad solicitante: Australia.
Dirección: 111 CANBERRA AVENUE GRIFFITH ACT 2603 AUSTRALIA.
Inventor/es: SMALL, DAVID.
Fecha de Publicación: .
Fecha Solicitud PCT: 28 de Mayo de 1999.
Fecha Concesión Europea: 21 de Julio de 2010.
Clasificación Internacional de Patentes:
- G01S19/04 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › proporcionando datos sobre la fase de la portadora.
- G01S19/07 G01S 19/00 […] › proporcionando datos para corregir los datos de posicionamiento medidos, p. ej. DGPS [GPS diferencial] o correcciones ionosféricas.
- G01S19/11 G01S 19/00 […] › siendo los elementos cooperantes seudolitos o repetidores de señales de sistemas de posicionamiento por satélite.
- G01S19/48 G01S 19/00 […] › combinando o alterando entre soluciones de posición derivadas de sistemas de posicionamiento por satélite y soluciones de posición derivadas de otros sistemas.
- G01S5/02R1
Clasificación PCT:
- G01S5/02 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › usando ondas de radio (G01S 19/00 tiene prioridad).
- G01S5/14 G01S 5/00 […] › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
- H04B7/185 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04B TRANSMISION. › H04B 7/00 Sistemas de radiotransmisión, es decir, utilizando un campo de radiación (H04B 10/00, H04B 15/00 tienen prioridad). › Estaciones espaciales o aéreas (H04B 7/204 tiene prioridad).
Clasificación antigua:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Finlandia, Chipre.
Fragmento de la descripción:
La presente invención se refiere de manera general a sistemas de posicionamiento en los que un objeto o un usuario, situado en un lugar no conocido, recibe señales desde una serie de fuentes y utiliza información derivada de las mismas para determinar la posición actual del objeto
o del usuario. Más particularmente, la presente invención se refiere a un sistema de posicionamiento que utiliza una red de dispositivos con unidades de posicionamiento autointegradas, sincronizadas a un Sistema de Satélites de Navegación Global (GNSS) para una determinación de posición de elevada exactitud en lugares en los que hay poca visibilidad de los satélites.
Antecedentes de la invención
La necesidad de localizar con exactitud el lugar en el que alguien o algo se encuentra en la superficie del mundo ha preocupado constantemente a los humanos. En realidad, la precisión y predictibilidad con la que se puede conseguir la localización es una unidad de medida por la que se puede evaluar el refinamiento tecnológico de una civilización. A lo largo del tiempo, el hombre ha mejorado la localización y navegación terrestres avanzando desde el sextante y cronómetro, sistemas inerciales, LORAN, TRANSIT y, más recientemente, GPS.
La constelación de 24 satélites del GPS creada por el Gobierno de los Estados Unidos emite señales de tiempo precisas conectadas a relojes atómicos situados a bordo. Utilizando fórmulas precisas y bien desarrolladas, el usuario receptor que recoge señales de 3 o más satélites simultáneamente puede determinar su posición en coordenadas globales absolutas, a saber, latitud y longitud. El GPS se ha demostrado como importante activo para la determinación de localización porque se puede disponer del mismo de forma global, es razonablemente preciso y es gratuito para el usuario final.
A pesar de su sofisticación tecnológica, el GPS está afectado todavía por varias limitaciones críticas que dificultan su adopción de forma amplia a nivel de consumidor. En primer lugar, la intensidad de las señales de GPS requiere que los satélites se encuentren “a vista” con respecto al receptor. Esto significa que no puede existir ninguna obstrucción sustancial entre los satélites y el receptor. En segundo lugar, las fórmulas de GPS requieren, como mínimo, que 3 satélites se encuentren a la vista para la determinación de una localización de 2 dimensiones (es decir, latitud y longitud) y, como mínimo, que 4 satélites se encuentren a la vista para la determinación de una localización de 3 dimensiones (es decir, latitud, longitud y altitud). En combinación, estos dos importantes inconvenientes alteran severamente la fiabilidad del GPS en zonas con relieve, tales como “cañones urbanos” y aseguran que el GPS estándar no
funciona en absoluto dentro de edificios o en lugares con
obstrucciones o pantallas. El GPS tiene, por lo tanto, una utilización extremadamente limitada en lugares urbanos, en los que vive gran parte de la población mundial.
De manera sorprendente, otras limitaciones del “consumidor” del GPS proceden de su disponibilidad global y su potencial para conseguir una precisión razonablemente elevada. En su forma original, el GPS tiene el potencial de facilitar una exactitud aproximada de 15 metros. El Gobierno de los Estados Unidos se preocupó con la posibilidad de que su propio sistema de satélites podría ser utilizado contra los Estados Unidos para hacer llegar, de manera precisa, cargas de armas enemigas. Por esta razón, las señales emitidas por la red GPS para uso civil están intencionadamente degradadas con respecto a señales de utilización militar USA codificadas, más exactas. Esta degradación, comúnmente conocida con los términos Disponibilidad Selectiva (SA), reduce la exactitud en bruto al uso civil aproximadamente a 100 metros 2dRMS.
En un esfuerzo de superar la SA, se ha desarrollado un sistema conocido como Diferencial de GPS (DGPS) para usuarios civiles en una zona localizada. El DGPS es capaz de facilitar una exactitud de varios metros a un usuario móvil. No obstante, el DGPS requiere, como mínimo, el establecimiento de una onerosa estación de emisión local. Requiere también que el consumidor móvil adquiera un equipo adicional en forma de un receptor de radio para captar correcciones GPS para su receptor GPS. En un sistema GPS, que se describe en el documento WO 95/18978 A1, se dispone
de varias estaciones de emisión, por ejemplo tres, y la
corrección de la posición determinada utiliza la interpolación entre las señales de corrección enviadas por aquellas cuya interpolación se basa en una posición previa del usuario móvil que se desplaza en un área limitada por las posiciones de las estaciones de emisión. De acuerdo con otro sistema DGPS, tal como se describe en el documento patente USA 5.323.322, se utiliza una red mundial de estaciones de referencia para calcular un mapa de contornos de isocorrección para cada satélite GPS, desde el cual se interpolan las correcciones para una posición de usuario y se envían a dicho usuario mediante satélites de comunicaciones.
Otro desarrollo reciente llamado Real Time Kinematic (RTK) (Cinemática en Tiempo Real) permite la mejora de la exactitud del sistema GPS hasta aproximadamente un centímetro. Si bien este grado de exactitud es altamente deseable para muchas posibles aplicaciones, el RTK es casi por completo el ámbito de disciplinas de elevada tecnología y habilidad, tales como geodesia, exploración y física. Los receptores RTK son habitualmente un orden de magnitud más oneroso que los receptores estándar GPS. Los sistemas RTK requieren transmisores locales poco habituales y, dependiendo del nivel de complejidad, pueden requerir hasta 10 horas de captación de señal sin movimiento antes de poder determinar posiciones precisas en RTK. El nivel de inversión necesario para RTK, junto con el equipo y habilidades especializadas requeridas, actúan sensiblemente contra la consideración del RTK para usos de consumidores o usos comerciales.
Se han hecho intentos de superar estas dificultades que se describen en la técnica anterior. Se han desarrollado sistemas híbridos que incorporan un sistema de posicionamiento global (por ejemplo, GPS) además de un sistema de posicionamiento relativo. Estos métodos comprenden sistemas de sensores inerciales que incorporan “dead reckoning” (cálculo de zonas muertas) cuando los satélites quedan obstaculizados (patente US 5.311.195) o transmisiones de radio de tipo comercial que llevan a cabo “posicionamiento de fase de delta” cuando los satélites se encuentran con dificultades de observación (patente US 5.774.829).
Desafortunadamente, estos sistemas de la técnica anterior tienen varios inconvenientes. El “dead reckoning” (cálculo de posición muerta) muestra errores acumulativos con el uso extenso y tanto la exactitud del “dead reckoning” como del posicionamiento de fase delta es limitada a la exactitud de posición absoluta inicial. Cualquier ambigüedad de posición inicial será transmitida, por lo tanto, a través de las soluciones subsiguientes de posición. La exactitud de la posición en fase delta quedará limitada por la geometría de los lugares de transmisión de emisiones de radio comerciales preexistentes. Una geometría
poco satisfactoria, tal como se puede observar en un receptor en desplazamiento, producirá soluciones de posición poco satisfactorias. Además, la exactitud de posición en fase delta queda limitada por lafrecuencia/longitud de onda de la señal de transmisión, de
manera que frecuencias más bajas (es decir, longitudes de
onda más largas) producen una menor exactitud. Además, los receptores desplazables de fase delta necesitan un conocimiento preexistente de coordenadas de transmisión de emisión de radio comercial. Finalmente, el posicionamiento delta requiere un receptor de referencia y un enlace de datos además de las transmisiones de emisión por radio de tipo comercial. La patente US 5.774.829 sugiere que este enlace de datos sea colocado como información en el canal de transmisión de emisión de radio de tipo comercial SCA.
Esto requeriría potencialmente cooperación con miles de emisoras comerciales, comportando sustanciales problemas logísticos.También se conocen en esta técnica intentos de utilizar pseudosatélites, o los “pseudolitos”, para incrementar o aumentar la conservación estándar de GPS. Los pseudolitos son transmisores basados en tierra que emiten...
Reivindicaciones:
1. Procedimiento para la creación de una red de dispositivos (402) con unidad de posicionamiento, en el que
- cada dispositivo (402) con unidad de posicionamiento recibe señales de posicionamiento (405, 406) permitiendo cada una de dichas señales de posicionamiento la realización de un cálculo de distancia,
- cada dispositivo (402) con unidad de posicionamiento determina su posición a partir de un mínimo de tres de dichas señales de posicionamiento (405, 406), comportando la determinación un cálculo de distancia llevado a cabo por cada señal de posicionamiento,
caracterizado porque,
- cada dispositivo con unidad de posicionamiento transmite una señal de posicionamiento (405, 406) que puede ser utilizada por otros dispositivos con unidad de posicionamiento, y
- cada dispositivo (402) con unidad de posicionamiento determina su posición a partir de cualquier combinación de un mínimo de tres señales de posicionamiento (405, 406) recibidas de otros dispositivos (402) con unidad de posicionamiento y satélites (401) de un Sistema de Satélites de Navegación Global.
2. Procedimiento, según la reivindicación 1, caracterizado porque cada uno de los dispositivos (402) con unidad de posicionamiento acciona de forma pulsante la transmisión de dicha señal (405) de posicionamiento transmitida.
3. Procedimiento, según la reivindicación 1 ó 2, caracterizado porque las señales de posicionamiento (405) transmitidas por los dispositivos (402) con unidad de posicionamiento son de frecuencia dual.
4. Procedimiento, según la reivindicación 3, caracterizado porque los dispositivos de posicionamiento
(402) reciben dichas señales de frecuencia dual.
5. Procedimiento, según la reivindicación 4, caracterizado porque los dispositivos (402) con unidad de posicionamiento utilizan dichas señales de frecuencia dual para resolver la ambigüedad de ciclo entero con fase portadora.
6. Procedimiento, según una de las reivindicaciones 1 a 5, caracterizado porque cada uno de los dispositivos
(402) con unidad de posicionamiento reduce datos de corrección diferencial a partir de señales (405) de posicionamiento recibidas desde otros dispositivos (402) con unidad de posicionamiento.
7. Procedimiento, según una de las reivindicaciones 1 a 6, caracterizado porque las señales (405) de posicionamiento transmitidas por cada dispositivo (402) con unidad de posicionamiento contiene datos de red.
8. Procedimiento, según la reivindicación 7, caracterizado porque todos los dispositivos con unidad de posicionamiento están sincronizados entre sí por tiempo de red distribuidos con intermedio de dichos datos de red.
9. Procedimiento, según una de las reivindicaciones 1 a 8, caracterizado porque todos los dispositivos (402) con
unidad de posicionamiento están sincronizados a un Sistema
de Satélite de Navegación Global por señales (406) de posicionamiento recibidas desde dicho Sistema de Satélites de Navegación Global.
10. Dispositivo (402) con unidad de posicionamiento para llevar a cabo el procedimiento, según una de las reivindicaciones 1 a 9, que comprende
- medios (403) para recibir señales de posicionamiento (405, 406) permitiendo cada una de dichas señales de posicionamiento la realización de un cálculo de distancia,
- medios para determinar su posición a partir de un mínimo de tres señales de posicionamiento recibidas (405, 406), comportando la determinación un cálculo de distancia llevado a cabo por cada señal de posicionamiento,
caracterizado porque,
- comprende además medios (404) para transmitir una señal exclusiva de posicionamiento (405), que permite la realización de cálculo de distancia, y
- en el que los medios para determinar la posición del dispositivo son adecuados para determinar dicha posición a partir de cualquier combinación de un mínimo de tres señales de posicionamiento (405, 406) transmitidas por dispositivos con unidad de posicionamiento (402) y satélites (401) de un Sistema de Satélites de Navegación Global.
11. Dispositivo, según la reivindicación 10, caracterizado porque dichos medios (404) para transmitir una señal de posición (405) son adecuados para el accionamiento pulsante de la transmisión de dicha señal de
posición.
12. Dispositivo, según la reivindicación 10 u 11, caracterizado porque dichos medios (404) para transmitir una señal de posición (405) son adecuados para transmisión en frecuencia dual de dicha señal de posición.
13. Dispositivo, según la reivindicación 12, caracterizado porque dichos medios (403) para recibir señales de posición (405) desde otros dispositivos (402) con unidad de posicionamiento son adecuados para la recepción en frecuencia dual de dichas señales de posición.
14. Dispositivo, según la reivindicación 13, caracterizado porque comprende además medios para resolución de ambigüedad de ciclo entero de fase portadora, utilizando señales de posicionamiento de frecuencia dual recibidas.
15. Dispositivo, según una de las reivindicaciones 10 a 14, caracterizado por comprender además medios para deducir datos de corrección diferencial a partir de señales de posición recibidas desde otros dispositivos con unidad de posicionamiento.
16. Dispositivo, según una de las reivindicaciones 10 a 15, caracterizado porque la señal de posición (405) transmitida por el dispositivo (402) con unidad de posicionamiento contiene datos de red y porque el dispositivo con unidad de posicionamiento (402) comprende medios para procesar datos de red.
17. Dispositivo, según la reivindicación 16, caracterizado porque comprende además medios para sincronizar dicho dispositivo (402) con unidad de
posicionamiento a través de tiempo de red distribuido con intermedio de dichos datos de red.
18. Dispositivo, según una de las reivindicaciones 10 a 17, caracterizado porque comprende además medios para su sincronización a un Sistema de Satélites de Navegación Global utilizando señales de posicionamiento (406) recibidas de los satélites (401) del Sistema de Satélites de Navegación Global.
19. Procedimiento para la determinación de la posición de un usuario a partir de señales de posición transmitidas por una red de dispositivos (402) con unidad de posicionamiento, creada por el procedimiento, según una de las reivindicaciones 1 a 9, en el que
- un receptor (403) recibe señales de posición (405, 406) y determina su posición a partir de, como mínimo, tres de dichas señales de posición, comportando la determinación un cálculo de distancia realizado en cada señal de posición,
- el receptor (403) emite su posición determinada,
caracterizado porque
- el receptor (403) determina su posición a partir de
cualquier combinación de un mínimo de tres señales (405, 406) de posición recibidas desde dispositivos (402) con unidad de posicionamiento y satélites de un Sistema de Satélites de Navegación Global (401).
20. Procedimiento, según la reivindicación 19, caracterizado porque, como mínimo, algunas de dichas señales de posición (405, 406) recibidas por el receptor
(403) son de frecuencia dual.
21. Procedimiento, según la reivindicación 19 ó 20, caracterizado porque el receptor (403) deduce además datos de corrección diferencial desde señales de posición recibidas (405, 406). 22. Procedimiento, según una de las reivindicaciones 19 a 21, caracterizado porque el receptor (403) procesa datos de red.
Patentes similares o relacionadas:
DISPOSITIVO PARA DETERMINAR UNA POSICIÓN DE DISPOSITIVO, del 12 de Enero de 2012, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Dispositivo para determinar una posición de dispositivo, con las siguientes características: una unidad para recibir señales […]
Sistema y método para encontrar una ubicación utilizando señales de comunicación, del 3 de Diciembre de 2014, de Exelis Inc. (100.0%): Un método para localizar un objeto utilizando señales de GPS que comprende la etapa de recibir señales de GPS desde un transmisor de señal de GPS en un receptor […]
 Procedimiento de geoposicionamiento que utiliza datos de asistencia, del 15 de Octubre de 2013, de CENTRE NATIONAL D'ETUDES SPATIALES: Procedimiento de determinación de datos de asistencia que facilita el tratamiento de señales de radionavegaciónque proceden de un conjunto de satélites de radionavegación […]
Procedimiento de geoposicionamiento que utiliza datos de asistencia, del 15 de Octubre de 2013, de CENTRE NATIONAL D'ETUDES SPATIALES: Procedimiento de determinación de datos de asistencia que facilita el tratamiento de señales de radionavegaciónque proceden de un conjunto de satélites de radionavegación […]
 POSICIONAMIENTO USANDO UNA ESTACIÓN DE REFERENCIA, del 27 de Mayo de 2011, de NOKIA CORPORATION: Un procedimiento que comprende: usar mediciones recibidas de fase portadora y / o fase de código sobre señales satelitales que son válidas para una […]
POSICIONAMIENTO USANDO UNA ESTACIÓN DE REFERENCIA, del 27 de Mayo de 2011, de NOKIA CORPORATION: Un procedimiento que comprende: usar mediciones recibidas de fase portadora y / o fase de código sobre señales satelitales que son válidas para una […]
SISTEMA DE INSPECCIÓN EN VUELO Y PROCEDIMIENTO PARA DICHO SISTEMA, del 29 de Abril de 2019, de INGENIO 3000, S.L: Sistema de inspección en vuelo, del tipo que comprenden, al menos, un sensor óptico para toma de imágenes montado en un gimbal a su vez montado […]
POSICIONAMIENTO OPTIMIZADO DE DISPOSITIVOS ELECTRÓNICOS DE BAJO CONSUMO ENERGÉTICO, del 21 de Diciembre de 2017, de ROKUBUN S.L: Diferentes aspectos de la invención implementan una arquitectura distribuida que permite a dispositivos móviles de bajo consumo energético procesar la información de […]
Receptor SBAS mejorado, del 2 de Agosto de 2017, de TELESPAZIO S.P.A: Un receptor SBAS configurado para recibir mensajes SBAS que contienen datos de aumentación y para proporcionar a uno o más receptores GPS […]
Sistema y procedimiento de difusión de información en un sistema de satélites de doble frecuencia, del 19 de Abril de 2017, de THALES: Procedimiento para transmitir información o datos "de corrección" Da en un sistema de navegación para satélites de doble frecuencia que comprende al menos un satélite […]