CONTROLADOR PARA MOTOR Y PROCEDIMIENTO DE CONTROL DE UN MOTOR.
Un controlador de motor para controlar un motor (250) que tiene una bobina de estator y un rotor,
incluyendo el controlador de motor:
un determinador de error (300) dispuesto para determinar durante una operación normal si hay un error en el motor en base a al menos uno de una corriente detectada, un voltaje detectado, y una frecuencia de operación evaluada, y
un controlador de operación (310) dispuesto para permitir que el motor haga una pausa temporal o se pare completamente en un caso donde se determina que hay un error en el motor y para reactivar el motor pausado después de un tiempo preestablecido, y
donde el controlador de operación está dispuesto para parar completamente las operaciones del motor en un caso donde el motor realiza una pausa más de un número preestablecido de veces dentro de un tiempo preestablecido
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08253357.
Solicitante: LG ELECTRONICS INC..
Nacionalidad solicitante: República de Corea.
Dirección: 20 YOIDO-DONG YOUNGDUNGPO-KU,SEOUL.
Inventor/es: HWANG,SUN HO, JUNG,HAN SU, LEE,CHUNG HU.
Fecha de Publicación: .
Fecha Solicitud PCT: 16 de Octubre de 2008.
Fecha Concesión Europea: 16 de Junio de 2010.
Clasificación Internacional de Patentes:
- H02P1/30 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 1/00 Disposiciones para arrancar motores eléctricos o convertidores dinamoeléctricos (arranque de motores síncronos con conmutadores electrónicos H02P 6/20, H02P 6/22; arranque de motores dínamoeléctricos que giran paso a paso H02P 8/04; control vectorial H02P 21/00). › por aumento progresivo de la frecuencia de alimentación al circuito primario del motor.
- H02P29/02D
- H02P6/18 H02P […] › H02P 6/00 Disposiciones para el control de motores síncronos u otros motores dinamoeléctricos mediante conmutación electrónica en función de la posición del rotor; Conmutadores electrónicos a este fin (control vectorial H02P 21/00). › sin elementos separados para detectar la posición.
- H02P6/20 H02P 6/00 […] › Disposiciones para el arranque (H02P 6/08 tiene prioridad).
Clasificación PCT:
- G01R31/34 FISICA. › G01 METROLOGIA; ENSAYOS. › G01R MEDIDA DE VARIABLES ELECTRICAS; MEDIDA DE VARIABLES MAGNETICAS (indicación de la sintonización de circuitos resonantes H03J 3/12). › G01R 31/00 Dispositivos para ensayo de propiedades eléctricas; Dispositivos para la localización de fallos eléctricos; Disposiciones para el ensayo eléctrico caracterizadas por lo que se está ensayando, no previstos en otro lugar (ensayo o medida de dispositivos semiconductores o de estado sólido, durante la fabricación H01L 21/66; ensayo de los sistemas de transmisión por líneas H04B 3/46). › Ensayo de máquinas dinamoeléctricas.
- H02P6/18 H02P 6/00 […] › sin elementos separados para detectar la posición.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Controlador para motor y procedimiento de control de un motor.
Campo técnico
La presente invención se refiere a un controlador de motor y un método de control de motor, que especialmente puede controlar establemente un motor determinando el fallo de detección de posición sin sensor, y parar el motor según la determinación.
Antecedentes de la invención
Un controlador de motor típico controla el accionamiento de un motor convirtiendo potencia de suministro CA a potencia CC y convirtiendo después la potencia CC a potencia CA con un voltaje preestablecido usando un inversor.
Es decir, un controlador de motor convencional detecta una corriente que circula a través del motor por un sensor de corriente montado dentro o fuera del motor y controla los encendidos/apagados de elementos de conmutación incluidos en un inversor en base a la corriente detectada.
En general, los elementos de conmutación incluidos en el inversor son movidos por una señal de control de conmutación del tipo PWM (modulación por anchura de pulso), y las operaciones del motor son controladas para evaluar una frecuencia deseada.
Mientras tanto, también hay un método de controlar un motor evaluando una corriente que circula a través del motor sin sensor con el fin de ahorrar costos.
Sin embargo, el método de control de motor del tipo sin sensor no proporciona una forma específica de proteger el motor a la aparición de algunos errores en el motor.
GB 2281 783 describe un método de diagnóstico de fallos para un motor CC sin escobillas.
JP 03251098 describe un accionamiento de motor sin escobillas que incluye control de rearranque.
Resumen de invención
El objeto de la presente invención es proporcionar un controlador de motor y un método de control de motor capaz de controlar establemente un motor determinando el fallo de detección de posición sin sensor y de parar el motor según dicha determinación.
Según un aspecto de la presente invención se facilita un controlador de motor y un método de controlar un motor según las reivindicaciones acompañantes.
Se facilita un controlador de motor para controlar un motor que tiene una bobina de estator y un rotor, incluyendo: un operador de activación que recibe una orden de operación con una frecuencia deseada preestablecida mientras el motor permanece estacionario, activa el motor a un voltaje preestablecido y una fase de voltaje, y aumenta después gradualmente una frecuencia de operación del motor; un intercambiador de operación que conmuta una operación de activación a una operación normal cuando la frecuencia de operación llega a una frecuencia preestablecida inferior a la frecuencia deseada; un evaluador que evalúa una posición del rotor incluido en el motor y la frecuencia de operación en base a una corriente o voltaje detectado del motor; un operador normal que opera el motor de forma normal en base a la posición evaluada del rotor; un determinador de error que determina durante la operación normal si hay un error en el motor en base a al menos uno de la corriente detectada, el voltaje detectado, y la frecuencia de operación evaluada; y un controlador de operación que permite parar el motor en un caso donde se determine que hay un error en el motor.
Se facilita un método de controlar un motor que tiene una bobina de estator y un rotor, incluyendo: un paso de operación de activación incluyendo recibir una orden de operación con una frecuencia deseada preestablecida mientras el motor permanece estacionario, activar el motor a un voltaje preestablecido y una fase de voltaje, y aumentar después gradualmente una frecuencia de operación del motor; un paso de cambio de operación consistente en conmutar una operación de activación a una operación normal cuando la frecuencia de operación llega a una frecuencia preestablecida inferior a la frecuencia deseada; un paso de operación normal consistente en operar el motor de forma normal en base a una posición del rotor evaluada por un evaluador del motor; un paso de determinación de error consistente en determinar durante la operación normal si hay un error en el motor en base a una corriente o un voltaje detectado del motor, o la frecuencia de operación evaluada; y un paso de parada consistente en parar el motor en un caso donde se determine que hay un error en el motor.
El controlador de motor y el método según realizaciones ejemplares de la presente invención pueden controlar establemente el motor determinando el fallo de detección de posición sin sensor y parar el motor según dicha determinación. Además, el controlador de motor y el método de control de motor según realizaciones ejemplares de la presente invención pueden sugerir una variedad de tipos asociados con el fallo de detección de posición sin sensor y por lo tanto controlar el motor más establemente.
Descripción del dibujo
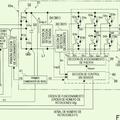
La figura 1 es un diagrama de circuito que ilustra un controlador de motor según una realización ejemplar de la presente invención.
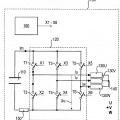
La figura 2 es una vista que ilustra esquemáticamente un acondicionador de aire asociado con una realización ejemplar de la presente invención.
La figura 3 es un diagrama de flujo que ilustra un método de controlar un motor según una realización ejemplar de la presente invención.
La figura 4 es un diagrama de flujo detallado que ilustra un método de determinar si hay un error y una pausa ejemplar descrita esquemáticamente con referencia a la figura 3.
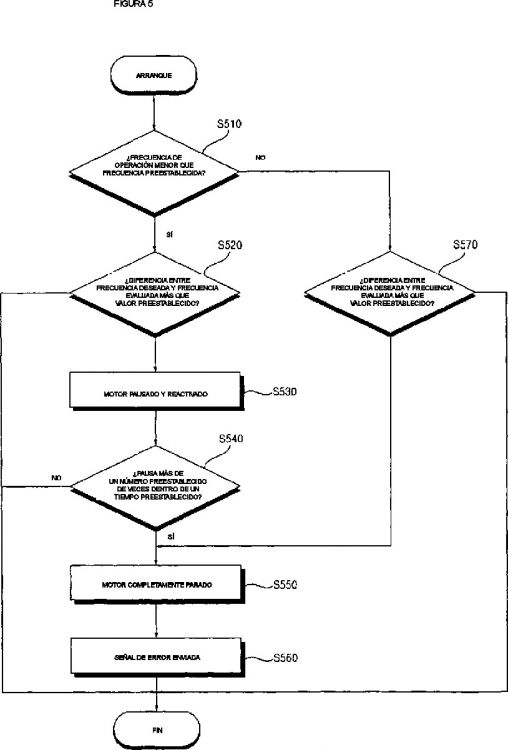
La figura 5 es un diagrama de flujo detallado que ilustra un método de determinar si hay un error y una pausa ejemplar descrita esquemáticamente con referencia a la figura 3.
Descripción detallada
A continuación se describirán realizaciones ejemplares de la presente invención con más detalle con referencia a los dibujos acompañantes.
La figura 1 es un diagrama de circuito que ilustra un controlador de motor según una realización ejemplar de la presente invención.
Con referencia a la figura 1, el controlador de motor 200 incluye un reactor 205, un convertidor 210, un condensador de filtrado C11, un inversor 220, un operador de activación 260, un intercambiador de operación 270, un operador normal 280, un determinador de error 300, un evaluador 290, un controlador de operación 310, y una pantalla de error 320. El controlador de motor 200 puede incluir además un voltaje de terminal CC D y un detector de corriente de salida E.
Aunque una fuente de potencia CA trifásica se ha representado como una fuente de potencia de suministro CA en la figura 1, la presente invención no se limita a ella. Por ejemplo, una fuente de potencia CA monofásica también puede ser empleada como la fuente de potencia de suministro CA.
El reactor 205 elimina componentes armónicos de la corriente de la potencia CA de suministro y suministra la potencia resultante al convertidor 210. En un caso donde el convertidor 210 incluye elementos de conmutación, el reactor 205 eleva la potencia CA de suministro y suministra la potencia elevada al convertidor 210. Además, el reactor 205 puede corregir el factor de potencia de la potencia CA.
El convertidor 210 convierte la potencia de suministro CA transmitida desde el reactor 205 a potencia CC. El convertidor 210 puede incluir múltiples elementos de conmutación para el convertidor, pero la presente invención no se limita a ello. Por ejemplo, el convertidor 210 puede ser un rectificador compuesto solamente de diodos. El convertidor 210 incluye un total de tres pares de elementos de conmutación, constando cada par de un elemento superior de conmutación y un elemento inferior de conmutación conectado en serie con el elemento superior de conmutación, estando los tres pares conectados paralelos uno con otro. Cada elemento de conmutación está conectado en paralelo con un diodo. Se aplica una señal de control de conmutación a un terminal de puerta de cada elemento de conmutación para realizar una operación de conmutación.
El condensador de filtrado C11 está conectado a un terminal de salida del convertidor 210. El condensador de filtrado C11 sirve para filtrar la potencia CC convertida salida del convertidor 210. A continuación, el terminal de salida del convertidor 210 se denomina "terminal cc" o "terminal de enlace cc". La potencia CC filtrada se aplica al inversor 220.
El inversor 220 incluye múltiples elementos de conmutación para el inversor, recibe la potencia CC filtrada, convierte la potencia CC filtrada...
Reivindicaciones:
1. Un controlador de motor para controlar un motor (250) que tiene una bobina de estator y un rotor, incluyendo el controlador de motor:
un determinador de error (300) dispuesto para determinar durante una operación normal si hay un error en el motor en base a al menos uno de una corriente detectada, un voltaje detectado, y una frecuencia de operación evaluada, y
un controlador de operación (310) dispuesto para permitir que el motor haga una pausa temporal o se pare completamente en un caso donde se determina que hay un error en el motor y para reactivar el motor pausado después de un tiempo preestablecido, y
donde el controlador de operación está dispuesto para parar completamente las operaciones del motor en un caso donde el motor realiza una pausa más de un número preestablecido de veces dentro de un tiempo preestablecido.
2. El controlador de motor de la reivindicación 1, incluyendo además:
un operador de activación (260) dispuesto para recibir una orden de operación con una frecuencia deseada preestablecida mientras el motor permanece estacionario, activar el motor a un voltaje preestablecido y una fase de voltaje, y aumentar después gradualmente una frecuencia de operación del motor;
un intercambiador de operación (270) dispuesto para conmutar una operación de activación a una operación normal cuando la frecuencia de operación llega a una frecuencia preestablecida más baja que la frecuencia deseada.
3. El controlador de motor de la reivindicación 2, incluyendo además:
un evaluador (290) dispuesto para evaluar una posición del rotor incluido en el motor y la frecuencia de operación en base a una corriente o voltaje detectado del motor;
un operador normal (280) dispuesto para operar el motor de forma normal en base a la posición evaluada del rotor;
4. El controlador de motor de la reivindicación 3, donde
si la corriente o voltaje detectado es igual o mayor que un primer valor preestablecido, o igual o menor que un segundo valor preestablecido menor que el primer valor preestablecido mientras la frecuencia de operación evaluada es igual o menor que una frecuencia preestablecida, el determinador de error lo determina como fallo de evaluación de posición del motor, y
el controlador de operación (310) está dispuesto para hacer una pausa del motor según el fallo de evaluación de posición del motor, y después reactiva el motor.
5. El controlador de motor de la reivindicación 3, donde
si la corriente o voltaje detectado es igual o mayor que un primer valor preestablecido, o igual o menor que un segundo valor preestablecido menor que el primer valor preestablecido mientras la frecuencia de operación evaluada es más que una frecuencia preestablecida, el determinador de error lo determina como fallo de evaluación de posición del motor, y el controlador de operación está dispuesto para parar completamente el motor según el fallo de evaluación de posición del motor.
6. El controlador de motor de la reivindicación 3, donde
si una diferencia entre la frecuencia deseada y la frecuencia evaluada es igual o mayor que un valor preestablecido mientras la frecuencia de operación evaluada es igual o menor que una frecuencia preestablecida, el determinador de error lo determina como fallo de evaluación de velocidad del motor, y el controlador de operación está dispuesto para hacer una pausa del motor según el fallo de evaluación de velocidad del motor, y después reactiva el mo- tor.
7. El controlador de motor de la reivindicación 1, donde las operaciones de parada completa se llevan a cabo parando el suministro por parte del inversor 220 de una corriente de salida al motor o parando el suministro de la potencia de suministro CA al controlador de motor.
8. El controlador de motor de la reivindicación 3, donde
si una diferencia entre la frecuencia deseada y la frecuencia evaluada es igual o mayor que un valor preestablecido mientras la frecuencia de operación evaluada es más que una frecuencia preestablecida, el determinador de error lo determina como fallo de evaluación de velocidad del motor, y el controlador de operación está dispuesto para parar completamente el motor según el fallo de evaluación de velocidad del motor.
9. El controlador de motor de la reivindicación 5, 6, 8 o 9, donde el controlador de operación está dispuesto para generar una señal de error cuando el motor está completamente parado.
10. Un método de controlar un motor que tiene una bobina de estator y un rotor, incluyendo el método de control de motor:
un paso de operación de activación incluyendo recibir una orden de operación con una frecuencia deseada preestablecida mientras el motor permanece estacionario, activar el motor a un voltaje preestablecido y una fase de voltaje, y aumentar después gradualmente una frecuencia de operación del motor;
un paso de cambio de operación consistente en conmutar una operación de activación a una operación normal cuando la frecuencia de operación llega a una frecuencia preestablecida menor que la frecuencia deseada;
un paso de operación normal consistente en operar el motor de forma normal en base a una posición del rotor evaluada por un evaluador del motor;
un paso de determinación de error (S470) consistente en determinar durante la operación normal si hay un error en el motor en base a una corriente o un voltaje detectado del motor, o la frecuencia de operación evaluada;
un paso de pausa y reactivación (S340) consistente en la pausa y reactivación del motor en un caso donde se determina que hay un error en el motor, y
un paso de parada completa (S350, S450) consistente en parar completamente las operaciones del motor en un caso donde el motor realiza una pausa más de un número preestablecido de veces dentro de un tiempo preestablecido.
11. El método de control de motor de la reivindicación 10, donde el paso de determinación de error incluye, si la corriente o voltaje detectado es igual o mayor que un primer valor preestablecido, o igual o menor que un segundo valor preestablecido menor que el primer valor preestablecido mientras la frecuencia de operación evaluada es igual o menor que una frecuencia preestablecida, determinarlo como fallo de evaluación de posición del motor, y
el paso de parar incluye hacer una pausa del motor según el fallo de evaluación de posición y después reactivar el motor.
12. El método de la reivindicación 10, donde
el paso de determinación de error incluye, si la corriente o voltaje detectado es igual o mayor que un primer valor preestablecido, o igual o menor que un segundo valor preestablecido menor que el primer valor preestablecido mientras la frecuencia de operación evaluada es más que una frecuencia preestablecida, determinarlo como fallo de evaluación de posición del motor, y el paso de parada incluye parar completamente el motor según el fallo de evaluación de posición del motor.
13. El método de la reivindicación 10, donde
el paso de determinación de error incluye, si una diferencia entre la frecuencia deseada y la frecuencia evaluada es igual o mayor que un valor preestablecido mientras la frecuencia de operación evaluada es igual o menor que una frecuencia preestablecida, determinarlo como fallo de evaluación de velocidad del motor, y el paso de parada incluye hacer una pausa del motor según el fallo de evaluación de velocidad y después reactivar el motor.
14. El método de la reivindicación 10, donde las operaciones de parada completa se llevan a cabo parando el suministro por parte del inversor 220 de una corriente de salida al motor o parando el suministro de la potencia CA al controlador de motor.
15. El método de la reivindicación 10, donde
el paso de determinación de error incluye, si una diferencia entre la frecuencia deseada y la frecuencia evaluada es igual o mayor que un valor preestablecido mientras la frecuencia de operación evaluada es más que una frecuencia preestablecida, determinarlo como fallo de evaluación de velocidad del motor, y el paso de parada incluye parar completamente el motor según el fallo de evaluación de velocidad del motor.
16. El método de la reivindicación 10, donde
el paso de parada completa incluye generar una señal de error.
Patentes similares o relacionadas:
Método y aparato para controlar un motor síncrono de imán permanente de un dispositivo de aire acondicionado, del 11 de Septiembre de 2019, de Hisense (Shandong) Air-conditioning Co., Ltd: Un dispositivo de aire acondicionado, que comprende: un módulo de almacenamiento de parámetros que almacena los parámetros iniciales del motor […]
Procedimiento de control implementado para controlar dos motores eléctricos síncronos de imán permanente conectados en paralelo, del 14 de Agosto de 2019, de SCHNEIDER TOSHIBA INVERTER EUROPE SAS: Procedimiento de control implementado en un convertidor de potencia que comprende una salida conectada a dos motores (Mot1, Mot2) eléctricos […]
Método para calibrar un sistema de accionamiento, del 13 de Marzo de 2019, de Nidec Control Techniques Limited: Un método para calibrar un sistema de accionamiento, dicho sistema de accionamiento incluyendo un motor síncrono que comprende un rotor que incluye un imán […]
Determinación de la posición del rotor de una máquina eléctrica, del 30 de Mayo de 2018, de KONE CORPORATION: Convertidor de frecuencia , que comprende un puente de carga y también un control del puente de carga, que suministra electricidad entre el puente de carga y una […]
Conjunto aspirador con entrada a través de depósito extraíble, del 28 de Marzo de 2018, de SHOP VAC CORPORATION: Un conjunto aspirador que tiene: un conjunto de motor/ventilador que tiene un motor y un impulsor de aire ; una manguera […]
 Dispositivo de reducción de consumo de energía, del 16 de Diciembre de 2015, de DAIKIN INDUSTRIES, LTD.: Un aparato de reducción de consumo de energía , que se proporciona en una unidad de interiores y/o una unidad de exteriores de un aparato de aire […]
Dispositivo de reducción de consumo de energía, del 16 de Diciembre de 2015, de DAIKIN INDUSTRIES, LTD.: Un aparato de reducción de consumo de energía , que se proporciona en una unidad de interiores y/o una unidad de exteriores de un aparato de aire […]
 Procedimiento y dispositivo para arrancar un motor eléctrico, del 6 de Agosto de 2014, de BSH BOSCH UND SIEMENS HAUSGERATE GMBH: Procedimiento para el arranque de un motor eléctrico , que presenta un rotor, caracterizado por las etapas siguientes:
- accionamiento del rotor con un […]
Procedimiento y dispositivo para arrancar un motor eléctrico, del 6 de Agosto de 2014, de BSH BOSCH UND SIEMENS HAUSGERATE GMBH: Procedimiento para el arranque de un motor eléctrico , que presenta un rotor, caracterizado por las etapas siguientes:
- accionamiento del rotor con un […]
Motor con convertidor AC, del 15 de Agosto de 2012, de BUGLAEV, OLEG ANATOLIEVICH (100.0%): Un motor eléctrico AC sin escobillas que está conectado a una fuente de alimentación y comprende un convertidor electromecánico con un devanado de tres secciones […]