APARATO RADAR.
Aparato de radar provisto de un transmisor (1) para la transmisión periódica de grupos mutuamente disjuntos de N impulsos del transmisor de radar,
con N = 4, 5, 6, ..., un receptor (4) para la recepción de señales de eco de los impulsos del transmisor de radar y un procesador de vídeo (5) para detectar posibles objetos sobre la base de los ecos recibidos y para estimar sin ambigüedad la distancia y la velocidad radial de estos objetos, estando diseñado el procesador de vídeo (5) para procesar simultáneamente ecos procedentes de un grupo entero de dichos grupos mutuamente disjuntos en un tiempo de escucha observado entre dos grupos de entre los grupos mutuamente disjuntos de impulsos del transmisor de radar, estando el procesador de vídeo provisto de:
- unos medios de memoria (6) para almacenar una fila de intensidades de vídeo complejas determinadas por el receptor (4),
- un filtro digital (7) para procesar una subfila continua de la fila de intensidades de vídeo, comprendiendo el filtro digital (7) un transformador de Fourier o un transformador lineal equivalente,
caracterizándose el aparato de radar porque, dentro de un grupo, los impulsos (T1, T2, T3) son mutuamente coherentes en fase, los impulsos no son equidistantes en tiempo y un intervalo de tiempo entre dos impulsos es siempre un múltiplo de una unidad de tiempo
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP00/05236.
Solicitante: THALES NEDERLAND B.V..
Nacionalidad solicitante: Países Bajos.
Dirección: ZUIDELIJKE HAVENWEG 40 P.O. BOX 42,7550 GD.
Inventor/es: DEDDEN,GERRIT.
Fecha de Publicación: .
Fecha Concesión Europea: 17 de Febrero de 2010.
Clasificación Internacional de Patentes:
- G01S13/30 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › que utilizan más de un pulso por período de radar.
Clasificación PCT:
- G01S13/30 G01S 13/00 […] › que utilizan más de un pulso por período de radar.
Clasificación antigua:
- G01S13/30 G01S 13/00 […] › que utilizan más de un pulso por período de radar.
Fragmento de la descripción:
Aparato de radar.
La invención se refiere a un aparato de radar provisto de un transmisor para la transmisión periódica de grupos mutuamente disjuntos de N impulsos del transmisor de radar, con N = 4, 5, 6,..., un receptor para la recepción de señales de eco de los impulsos del transmisor de radar y un procesador de vídeo para detectar posibles objetos sobre la base de los ecos recibidos y para estimar parámetros de estos objetos.
La patente US No. 4,106,019 describe un sistema de radar Doppler de resolución en alcance. La patente US No. 5,808,580 describe un concepto de sistema de radar/sonar para cobertura Doppler de extenso alcance.
Los aparatos de radar de este tipo son bien conocidos en la técnica. Los dispositivos en cuestión son aparatos de radar en los que se observa un tiempo de escucha entre dos impulsos sucesivos del transmisor de radar para permitir la recepción de señales de eco. El inconveniente de estos aparatos de radar conocidos reside en que, para blancos distantes, el intervalo entre los impulsos deberá elegirse de modo que sea grande, pero esto excluiría la determinación sin ambigüedad de una velocidad radial de blancos.
El aparato de radar de la invención según el juego adjunto de reivindicaciones supera este inconveniente en una medida significativa.
Se explicará ahora la invención con mayor detalle haciendo referencia a las figuras siguientes, de las cuales:
La figura 1 representa un diagrama de bloques del aparato de radar de la invención;
La figura 2A representa un posible grupo de impulsos de transmisor de radar según la invención;
La figura 2B representa una función de autocorrelación para este grupo;
La figura 3A representa un posible procesador de vídeo para blancos estacionarios;
La figura 3B representa un posible procesador de vídeo para blancos de velocidad conocida;
La figura 4 representa un posible procesador de vídeo para blancos de velocidad aleatoria; y
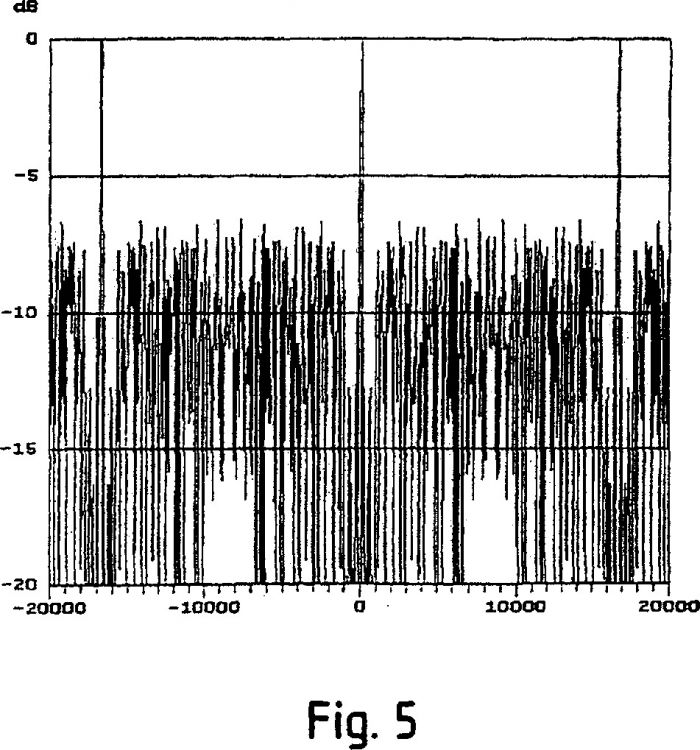
La figura 5 representa un posible espectro de un blanco.
La figura 1 es un diagrama de bloques de una posible realización del aparato de radar de la invención. Un transmisor 1 genera grupos de impulsos de transmisor de radar que son transmitidos a través de una antena de transmisión 2. Señales de eco de radar son recibidas por una antena de recepción 3 y son procesadas en un receptor 4 para producir una señal de vídeo digital compleja. En general, es posible también utilizar una antena de transmisión/recepción combinada bajo la aplicación de una unidad T/R bien conocida en la técnica. La señal de vídeo producida por el receptor 4 es aplicada a un procesador de vídeo 5 en el que es almacenada temporalmente en unos medios de memoria 6 para esperar un procesamiento ulterior. El contenido de los medios de memoria 6 es filtrado por un filtro digital 7 cuya salida está conectada a un circuito de umbral 8. En caso de cruce de un umbral preestablecido, el circuito 8 generará una predetección, cuyas posible predetecciones se combinan en un combinador 9 de grupos consecutivamente transmitidos de impulsos del transmisor de radar para obtener una detección que se aplica a una salida 10 para su ulterior procesamiento.
La figura 2A representa un posible grupo de impulsos de transmisor de radar según esta invención. El grupo muestra varios rasgos característicos. En primer lugar, el intervalo entre dos impulsos es bastante más corto que el tiempo de escucha del aparato de radar, es decir, el tiempo requerido por un impulso para alcanzar un blanco y volver. En segundo lugar, la duración de un impulso es más corta que el intervalo entre dos impulsos, en este caso T1, T2, T3. En tercer lugar, el grupo se escoge de tal manera que la función de autocorrelación del grupo muestre solamente un pico. Según la invención, los intervalos de tiempo T1, T2, T3 se eligen preferiblemente diferentes.
Según la invención, se transmite un grupo y se procesa simultáneamente un eco del blanco para el grupo entero. A este fin, se aplica el eco del blanco a un autocorrelacionador que presenta la posición del blanco por medio de un pico en la función de autocorrelación.
La figura 2B representa una función de autocorrelación para el grupo mostrado en la figura 2A. Se ha determinado cuidadosamente la posición de los impulsos de modo que haya solamente un pico de altura cuatro, teniendo todos los lóbulos laterales una altura uno. Será evidente que el número de grupos que procesan esta característica es considerable, cumpliéndose esto ciertamente si T1, T2, T3 pueden elegirse de modo que sean grandes. Sin embargo, el grupo no ha de resultar demasiado largo, ya que esto haría que el alcance mínimo del aparato de radar llegara a ser demasiado grande. El número de impulsos que ha de estar contenido en un grupo deberá mantenerse dentro de límites especificados, ya que, en caso contrario, se excedería el ciclo de trabajo máximo del transmisor.
En general, un aparato de radar no emite cuatro impulsos, sino aproximadamente diez impulsos. Esto entraña la ventaja de que mejora la relación de lóbulo principal/lóbulo lateral de la función de autocorrelación, lo que aumenta la probabilidad de detección.
La figura 3A es una representación detallada de un posible filtro digital 7 para blancos estacionarios. El filtro se aplica a unos medios de memoria 6, divididos en cuantos de alcance, que contienen una fila de intensidades de vídeo complejas producidas por el receptor de radar. En caso de solamente un blanco, las cuatro células de memoria 11a, 11b, 11c y 11d contienen cada una de ellas una intensidad de blanco más alta que el nivel de ruido, que tiene su origen en los cuatro impulsos transmitidos en una sola ráfaga. El filtro digital 7 se ha implementado aquí como un circuito sumador que suma continuamente intensidades de blanco provenientes de cuatro medios de memoria de acuerdo con el patrón transmitido. Debido al rasgo característico del grupo transmitido, solamente una señal de salida que representa la distancia del blanco aparece en la salida del filtro digital 7. En caso de blancos móviles, las cuatro intensidades de blanco muestran una fase variable que da como resultado pérdidas de detección.
La figura 3B representa un posible filtro digital 7 para blancos de velocidad conocida, en donde el filtro digital 7 está provisto de redes de desfasado 12a, 12b, 12c, 12d. Las redes 12a, 12b, 12c, 12d se han escogido de tal manera que, para una velocidad seleccionada, basada en la temporización de los impulsos dentro de un grupo, se compense el desfase que se produzca como resultado del movimiento del blanco. Esto restaura/reactiva la función de autocorrelación original y elimina pérdidas de detección.
La figura 4 representa un posible procesador de vídeo para blancos de velocidad aleatoria. Se implementa un filtro digital 7 como un transformador de Fourier que se aplica a unos medios de memoria 6. Debido a que el grupo mostrado en este ejemplo tiene una longitud de 16 cuantos de alcance, se hace uso de un transformador de Fourier de 16 puntos, del cual solamente las salidas 0, 5, 11 y 15 están conectadas a los correspondientes cuantos de alcance, lo que asegura una suma óptima de la señal recibida. Las otras entradas se mantienen inutilizadas. De manera completamente análoga al correlacionador descrito con referencia a la figura 3A, la señal de correlación en caso de blancos estacionarios aparece en la salida 0 del transformador de Fourier. Unas señales de eco de blancos móviles emergen en las otras salidas del transformador de Fourier 7 a fin de permitir la determinación de la posición y velocidad del blanco.
Según la invención, la señal de salida del transformador de Fourier 7 se alimenta a un circuito de umbral 8. En el circuito de umbral 8 se puede determinar de una manera conocida en la técnica un valor umbral por cuanto de alcance a partir de los 16 valores de entrada; asimismo, se puede verificar sí un valor de entrada excede significativamente del umbral, lo que indicaría la presencia de un blanco en este cuanto de alcance, después de lo cual se puede generar una predetección. Seguidamente, una probabilidad de detección y una tasa de falsas alarmas pueden ser establecidas de una manera obvia por un experto en la materia.
Es posible también generar detecciones sin la introducción de un valor umbral. Este método se basa en el supuesto de que en presencia de un blanco hay un máximo en el espectro. En el caso improbable de que aparezcan dos máximos, uno de estos máximos se designa arbitrariamente...
Reivindicaciones:
1. Aparato de radar provisto de un transmisor (1) para la transmisión periódica de grupos mutuamente disjuntos de N impulsos del transmisor de radar, con N = 4, 5, 6, ..., un receptor (4) para la recepción de señales de eco de los impulsos del transmisor de radar y un procesador de vídeo (5) para detectar posibles objetos sobre la base de los ecos recibidos y para estimar sin ambigüedad la distancia y la velocidad radial de estos objetos, estando diseñado el procesador de vídeo (5) para procesar simultáneamente ecos procedentes de un grupo entero de dichos grupos mutuamente disjuntos en un tiempo de escucha observado entre dos grupos de entre los grupos mutuamente disjuntos de impulsos del transmisor de radar, estando el procesador de vídeo provisto de:
caracterizándose el aparato de radar porque, dentro de un grupo, los impulsos (T1, T2, T3) son mutuamente coherentes en fase, los impulsos no son equidistantes en tiempo y un intervalo de tiempo entre dos impulsos es siempre un múltiplo de una unidad de tiempo.
2. Aparato de radar según la reivindicación 1, caracterizado porque se genera por grupo transmitido y por subfila una predetección para al menos la señal de salida más fuerte del transformador de Fourier.
3. Aparato de radar según la reivindicación 2, caracterizado porque se genera una detección si se generan al menos P predetecciones prácticamente idénticas para la misma subfila a partir de Q grupos consecutivamente transmitidos, en donde P = 1, 2,..., Q = 1, 2,... y P
4. Aparato de radar según la reivindicación 3, caracterizado porque el transmisor (1) está diseñado para posicionar los impulsos en un grupo en orden de tiempo de tal manera que, para un blanco puntual, el transformador de Fourier entregue una señal de salida para al menos sustancialmente una subfila.
5. Aparato de radar según la reivindicación 4, caracterizado porque se selecciona de entre todos los patrones de impulsos adecuados posibles un patrón de impulsos para el cual, en caso de un blanco puntual, el transformador de Fourier entregue una señal de salida con lóbulos laterales mínimos.
6. Método de funcionamiento de un aparato de radar, según el cual se transmiten periódicamente grupos de N impulsos de transmisor de radar, con N = 4, 5, 6,..., y en un tiempo de escucha entre dos grupos de impulsos del transmisor de radar se aplican simultáneamente a un procesador de vídeo (5) las señales de eco de radar recibidas de un grupo entero de dichos grupos mutuamente disjuntos para estimar sin ambigüedad la distancia y la velocidad radial de un posible blanco detectado, siendo las señales de eco de radar recibidas digitalizadas y aplicadas secuencialmente a un filtro digital que comprende al menos N entradas, caracterizado porque, dentro de un grupo, los impulsos (T1, T2, T3) son mutuamente coherentes en fase, los impulsos se transmiten de manera no equidistante en tiempo y un intervalo de tiempo entre dos impulsos es siempre un múltiplo de una unidad de tiempo.
7. Método según la reivindicación 6, caracterizado porque se posicionan los impulsos del transmisor de radar dentro de un grupo de tal manera que, al menos para un blanco puntual, el filtro digital (7) entregue una señal de salida al menos sustancialmente una vez.
8. Método según la reivindicación 7, caracterizado porque las señales de eco de radar recibidas son digitalizadas y aplicadas secuencialmente a un transformador de Fourier con M entradas, en donde M >> N.
9. Método según la reivindicación 8, caracterizado porque se posicionan los impulsos del transmisor de radar dentro de un grupo de tal manera que, al menos para un blanco puntual, el transformador de Fourier entregue una señal de salida con lóbulos laterales mínimos en el dominio de frecuencia.
10. Método según la reivindicación 9, caracterizado porque se genera por grupo transmitido y por subfila una predetección para al menos la señal de salida más fuerte del transformador de Fourier.
11. Método según la reivindicación 10, caracterizado porque se genera una detección si al menos P predetecciones prácticamente idénticas son generadas para la misma subfila a partir de Q grupos consecutivamente transmitidos, en donde P = 1, 2,..., Q = 1, 2,... y P
Patentes similares o relacionadas:
Aparato de radar marino, del 7 de Mayo de 2014, de Kelvin Hughes Limited: Aparato de radar marino que comprende medios para generar información Doppler para permitir identificar dianas con diferentes velocidades estando […]