APARATO QUE COMPRENDE UNA VENTOSA CON FUNCION AUTOSELECCIONADORA PARA LA MANIPULACION DE MATERIAL.
1. Aparato para la manipulación de material, que comprende al menos una ventosa de recogida-liberación del material,
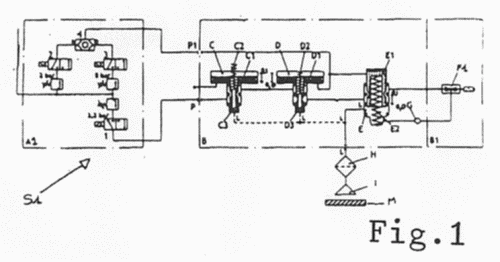
que prevé el vacío, formado entre dicha ventosa y el material que se debe manipular, generado por medios de formación de vacío como mediante efecto venturi o mediante una bomba de vacío; caracterizado por el hecho de que el aparato está constituido por un circuito de alimentación neumática de varias vías de una válvula de autoselección, que comprende unos conmutadores principales neumáticos, dichos conmutadores estando interconectados a un tercer conmutador neumático interpuesto entre el medio de formación de vacío y la válvula de autoselección.
2. Aparato para la manipulación con ventosas, según la reivindicación 1, caracterizado por el hecho de que está esencialmente dividido en bloques, a los cuales se conecta al menos una ventosa; respectivamente, un primer bloque está constituido por una instalación neumática para la alimentación de los bloques dependientes, segundo y tercero, que comprenden una válvula autoseleccionadora que interactúa con un medio para generar vacío, dicho primer bloque estando esencialmente compuesto por reguladores de presión y electroválvulas conmutadoras cooperantes con una válvula alternativa; donde dicho primer bloque alimenta un segundo bloque que comprende la válvula autoseleccionadora, y sustancialmente compuesta por conmutadores neumáticos, una válvula de retención y un medio generador de vacío.
3. Aparato para la manipulación con ventosas, según las reivindicaciones 1 y 2, caracterizado por el hecho de que el bloque que comprende la instalación neumática alimenta una o más ventosas, así como el bloque que comprende una válvula autoseleccionadora que coopera con un medio para generar vacío es aplicado a cada ventosa o grupo de ventosas.
4. Aparato para la manipulación con ventosas, según las reivindicaciones precedentes, caracterizado por el hecho de que la válvula de autoselección comprende dos conmutadores neumáticos, cada uno dotado de un pistón móvil axialmente y cedible elásticamente.
5. Aparato para la manipulación con ventosas, según las reivindicaciones precedentes, caracterizado por el hecho de que en caso de activación, a través de un impulso se excitan las electroválvulas del primer bloque de manera que, por medio de una primera electroválvula, el impulso de aire pasa a través de los conmutadores neumáticos del segundo bloque para alimentar el generador de vacío; mientras que con la segunda electroválvula el flujo de aire alimenta un primer conmutador neumático, de tal modo que determina el desplazamiento del segundo pistón; en tal caso el aire proveniente de la electroválvula, pasando a través de la válvula alternativa, desplaza la esfera permitiendo la alimentación del circuito, el cual entrando en el segundo bloque determina el desplazamiento de dicho pistón.
6. Aparato para la manipulación con ventosas, según las reivindicaciones precedentes, caracterizado por el hecho de que el flujo de aire proveniente de la primera electroválvula del primer bloque, entrando en el bloque sucesivo con una duración de algún segundo, activa una depresión en el circuito y por lo tanto mantiene el pistón del conmutador neumático en autorretención.
7. Aparato para la manipulación con ventosas, según las reivindicaciones precedentes, caracterizado por el hecho de que al menos un conmutador neumático del segundo bloque está dotado de un muelle más rígido.
8. Aparato para la manipulación con ventosas, según las reivindicaciones precedentes, caracterizado por el hecho de que el flujo de aire emitido por una primera electroválvula, pasa en primer lugar a través de los conmutadores neumáticos del pistón del segundo bloque, por lo tanto a través de un tercer conmutador neumático dotado de un muelle más rígido, alimentando el generador de vacío, el cual eleva la esfera de la válvula de retención alimentando así el circuito de una depresión que al mismo tiempo va a alimentar la ventosa para el desplazamiento del material y el pilotaje del circuito.
9. Aparato para la manipulación con ventosas, según las reivindicaciones precedentes, caracterizado por el hecho de que la depresión de pilotaje, pasando a través del pequeño orificio del vástago del pistón del primer conmutador neumático, forma una resución en la cámara superior del conmutador manteniendo en posición 0.1 el pistón mismo, formando un circuito de autorretención.
10. Aparato para la manipulación con ventosas, según las reivindicaciones precedentes, caracterizado por el hecho de que la función de autorretención se obtiene cuando el vacío ha alcanzado un valor de depresión suficiente para mantener el pistón del segundo conmutador neumático en posición elevada.
11. Aparato para la manipulación con ventosas, según las reivindicaciones precedentes, caracterizado por el hecho de que hay una comunicación entre la cámara inferior del vástago y la cámara superior del pistón.
12. Aparato para la manipulación con ventosas, según las reivindicaciones precedentes, caracterizado por el hecho de que en el caso en el que la ventosa tuviera una gran pérdida de agarre, o se separe, automáticamente desactivará la autorretención del segundo conmutador del segundo bloqueo, interrumpiendo automáticamente la alimentación del generador de vacío.
13. Aparato para la manipulación con ventosas, según las reivindicaciones precedentes, caracterizado por el hecho de que en fase de reposo, el primer conmutador neumático del segundo bloque dotado de un muelle más robusto que el muelle del segundo conmutador, al aumentar la depresión permite el desplazamiento del pistón en posición alta, en un momento sucesivo respecto al primer conmutador, poniéndolo en condición de autorretención, de tal modo que interrumpe el flujo de aire proveniente de la primera electroválvula del primer bloque destinado a la alimentación del generador de vacío.
14. Aparato para la manipulación con ventosas, según las reivindicaciones precedentes, caracterizado por el hecho de que en fase de disminución de depresión, se desplaza el pistón del primer conmutador neumático, llevándose en posición baja, de manera que el flujo de aire proveniente de la primera electroválvula del primero bloque alimente el primer conmutador neumático en posición alta que a su vez, a través del tercer conmutador neumático, va a alimentar el generador de vacío que reabre la válvula de retención.
15. Aparato para la manipulación con ventosas, según las reivindicaciones precedentes, caracterizado por el hecho de que la fase de depresión reactivada prevé que al reabrirse la válvula de retención el valor de la depresión del circuito vuelva al máximo, reposicionando así para la autorretención el pistón del primer conmutador neumático en posición alta y volviendo a cerrar así el flujo de aire comprimido proveniente de la primera electroválvula del primer bloque con análogo cierre de la válvula de retención.
16. Aparato para la manipulación con ventosas, según las reivindicaciones precedentes, caracterizado por el hecho de que la fase de separación de la ventosa del material, ocurre manteniendo excitada la primera electroválvula del primer bloque y excitando una tercera electroválvula, la cual hace afluir al circuito una presión de aire más alta que la segunda electroválvula, desplazando así la esfera de la válvula alternativa; el aire con presión más alta de aquella ejercida para la activación del sistema para el agarre de materiales manteniendo el pistón del primer conmutador neumático en posición alta y desplazando además el cursor del tercer conmutador neumático en posición baja, bloqueando así la alimentación del medio generador de vacío, haciendo pasar el flujo de aire directamente del circuito a la ventosa.
17. Aparato para la manipulación con ventosas, según las reivindicaciones precedentes, caracterizado por el hecho de que utiliza un medio generador de vacío del tipo con efecto venturi.
18. Aparato para la manipulación con ventosas, según las reivindicaciones precedentes, caracterizado por el hecho de que está prevista una bomba de vacío que alimenta el circuito para la fase de separación de la ventosa con un flujo de aire a presión, excitando la primera electroválvula y desactivando una cuarta electroválvula, cuando para todas las otras fases precedentes el circuito es alimentado por una línea en depresión en vez de a presión.
Tipo: Resumen de patente/invención.
Solicitante: G 01.COM SRL.
Nacionalidad solicitante: Italia.
Dirección: VIA N. SAURO, 35/L.,31036 ISTRANA. TREVISO.
Inventor/es: MARTON,LUIGI.
Fecha de Solicitud: 4 de Junio de 2004.
Fecha de Publicación: .
Fecha de Concesión: 2 de Diciembre de 2004.
Clasificación Internacional de Patentes:
- B65H29/24 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65H MANIPULACION DE MATERIALES DELGADOS O FILIFORMES, p. ej. HOJAS, BANDAS, CABLES. › B65H 29/00 Entrega o avance de los artículos a la salida de las máquinas; Avance de los artículos hacia las pilas o cuando ya están en ellas (unión, colocación o agrupación de artículos B65H 39/00; combinaciones de operaciones de apilado y de sacado de artículos que presentan otro interés que la operación individual de apilado o de sacado de artículos B65H 83/00; recirculación de artículos B65H 85/00; para artículos que no están definidos por la nota (3) (i) de la presente subclase, ver B65G). › por aparato de chorro de aire o que aspira (con caída de artículos de transportadores aspirantes B65H 29/32).
Patentes similares o relacionadas:
Dispositivo de mantenimiento para una estación de trabajo de una máquina de conformado, del 15 de Julio de 2020, de BOBST MEX SA: Máquina de conformado que comprende una estación de trabajo que incluye un dispositivo de mantenimiento de un elemento en forma […]
DISPOSITIVO DE AGARRE PARA EL DESPLAZAMIENTO DE OBJETOS, del 16 de Marzo de 2020, de Raimondi S.p.A: 1. Dispositivo de agarre para el desplazamiento de objetos, caracterizado porque comprende: - un cuerpo de soporte provisto de un mango ; - una […]
Unidad de transporte de hojas o de una hoja continua para máquinas de conversión de papel, del 15 de Enero de 2020, de M T C - MACCHINE TRASFORMAZIONE CARTA S.R.L.: Una máquina de plegado o interplegado, que comprende: - una sección de plegado, o interplegado, dispuesta para plegar, o interplegar, una hoja continua de […]
Procedimiento y dispositivo con módulos y equipos seccionadores para sustratos en forma de pliego, del 4 de Septiembre de 2019, de KOENIG & BAUER AG: Dispositivo para el tratamiento de sustratos que comprende un alimentador y uno o varios primeros módulos de base , que presentan, […]
Máquina y metodo para hacer pilas de hojas de papel plegadas, del 8 de Mayo de 2019, de M T C - MACCHINE TRASFORMAZIONE CARTA S.R.L.: Máquina para obtener pilas de hojas de papel plegadas, o material similar, tales como servilletas o pañuelos de papel, que comprende: - un medio de alimentación […]
Dispositivo de control óptico de una cara de un recorte, máquina de tratamiento de recortes y plegadora-encoladora que comprende el dispositivo, del 20 de Marzo de 2019, de BOBST MEX SA: Dispositivo de control óptico de una cara de un recorte , que comprende: - un transportador de vacío , adecuado para transportar […]
DISPOSITIVO Y PROCEDIMIENTO PARA EL TRANSPORTE DE LÁMINAS FLEXIBLES, del 20 de Septiembre de 2018, de SIMON CORRUGATED MACHINERY, S.L. (100.0%): Dispositivo para el transporte de láminas flexibles que combina unos medios de apoyo móviles sobre los que puede quedar aplicada […]
Dispositivo de transporte por succión para el transporte de piezas planas, e instalación para fabricar piezas planas que comprende un dispositivo de transporte por succión de este tipo, del 18 de Abril de 2018, de BW Papersystems Hamburg GmbH: Dispositivo de transporte por succión para el transporte de piezas planas , en particular hojas de papel, preferiblemente en el trayecto […]