Sistema de obtención de datos para el seguimiento de sistemas.
Un método de seguimiento de los parámetros operativos de un sistema laminador (10) que incluye un cilindro de trabajo giratorio (16,
18) accionado por un dispositivo impulsor provisto de varios componentes de un tren de potencia de laminador (14, 20, 22, 25, 26) que incluyen un eje (24, 26); dicho método comprende:
la provisión de una primera unidad sensora (42, 44) en un primer componente de un tren de potencia de laminador (14, 20, 22); dicha primera unidad sensora (42, 44) incluye un sensor (92) para generar una señal analógica en respuesta a una situación operativa del primer componente de un tren de potencia de laminador (14, 20, 22) y un procesador local integrado (90) para el tratamiento de la señal analógica generada por el sensor (92); dicho procesador local integrado (90) cuenta con un temporizador asociado;
el tratamiento de la señal analógica generada por el sensor (92) de la primera unidad sensora (42, 44) durante el funcionamiento del primer componente de un tren de potencia de laminador (14, 20, 22) utilizando el procesador local integrado (90) de la primera unidad sensora (42, 44) para producir un primer conjunto de muestras de señales digitales con al menos un sello de tiempo correspondiente asociado a las mismas;
la comunicación del primer conjunto de muestras de señales digitales procedentes de la primera unidad sensora (42, 15 44) a una unidad de tratamiento remota (38, 40) alejada de la primera unidad sensora (42, 44); caracterizada por la provisión de una segunda unidad sensora (46a, 46b) en el eje (24, 26), donde la segunda unidad sensora (46a, 46b) gira con el eje (24, 26), incluye un transmisor de RF (45) para comunicar el segundo conjunto de muestras de señales digitales a la unidad de tratamiento remota al menos parcialmente por medio de señales de comunicación de RF, y comprende tanto un sensor (92) para generar una señal analógica en respuesta a una situación operativa 20 del eje (24, 26) como un procesador local integrado (90) para el tratamiento de la señal analógica generada por el sensor de la segunda unidad sensora (46a, 46b); dicho procesador local integrado (90) cuenta con un temporizador asociado;
el tratamiento de la señal analógica generada por el sensor (92) de la segunda unidad sensora (46a, 46b) durante el funcionamiento del eje (24, 26), utilizando el procesador local integrado (90) de la segunda unidad sensora (46a, 25 46b) para producir un segundo conjunto de muestras de señales digitales con al menos un sello de tiempo correspondiente asociado a las mismas; y
la comunicación del segundo conjunto de muestras de señales digitales procedentes de la segunda unidad sensora (46a, 46b) a la unidad de tratamiento remota (38, 40), donde la unidad de tratamiento remota (38, 40) está alejada de la segunda unidad sensora (46a, 46b),
donde la unidad de tratamiento remota (38, 40) sincroniza el primer conjunto de muestras de señales digitales con el segundo conjunto de muestras de señales digitales basándose, al menos parcialmente, en los datos del sello de tiempo asociado a dichas muestras, y la unidad de tratamiento remota (38, 40) comprende un receptor de RF (47) asociado al transmisor de RF (45).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2006/027841.
Solicitante: XTEK, INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 11451 READING ROAD CINCINNATI, OHIO 45241 ESTADOS UNIDOS DE AMERICA.
Inventor/es: COX,SARAH A, O\'CULL,LARRY D, WILES,JEFFREY L, IVERS,VICTOR M.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01M13/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01M ENSAYO DEL EQUILIBRADO ESTATICO O DINAMICO DE MAQUINAS O ESTRUCTURAS; ENSAYO DE ESTRUCTURAS O APARATOS, NO PREVISTOS EN OTRO LUGAR. › G01M 13/00 Ensayos de partes de la máquina. › Engranajes; Mecanismos de transmisión.
- G05B23/02 G […] › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 23/00 Ensayo o monitorización de sistemas de control o de sus elementos (monitorización de sistemas de control por programa G05B 19/048, G05B 19/406). › Ensayo o monitorización eléctrico.
PDF original: ES-2469672_T3.pdf
Fragmento de la descripción:
Sistema de obtenciïn de datos para el seguimiento de sistemas.
ïmbito tïcnico La presente solicitud se relaciona, en general, con los sistemas de obtenciïn de datos y, en particular, con un sistema de obtenciïn de datos para el seguimiento de sistemas.
Antecedentes Es frecuente el seguimiento de las mïquinas para detectar y medir determinadas situaciones operativas. Por ejemplo, puede interesar vigilar vibraciones u oscilaciones en mïquinas equipadas con piezas mïviles. Tambiïn podrïa ser interesante medir la carga (por ejemplo, el par motor) de una mïquina utilizada para hacer girar un eje. En ocasiones, la propia mïquina puede presentar cierta capacidad de seguimiento de una situaciïn operativa, como las revoluciones por minuto (RPM) de un eje giratorio, por ejemplo. Sin embargo, en muchos casos, la mïquina es incapaz de ofrecer datos relativos, al menos, a algunas de las caracterïsticas operativas cuyo seguimiento pueda desear un usuario.
Se han propuesto sistemas de seguimiento capaces de realizar las tareas de mediciïn deseadas. Por ejemplo, se ha propuesto un sistema que comprende un aparato de mediciïn manual y portïtil. Dicho medidor se conecta mediante un cable transmisor a un punto de una mïquina que se excita por oscilaciones, utilizïndose el medidor en situaciones operativas en ese punto. Para procesar los datos medidos por el aparato de mediciïn se utiliza un ordenador central. El ordenador central tambiïn almacena los datos recogidos por el aparato de mediciïn.
Dicho medidor manual puede medir una situaciïn en un lugar de la mïquina, aportando una “foto instantïnea” de las condiciones de funcionamiento en un punto y un momento concretos en los que se adquieren los datos. Se necesita un sistema capaz de efectuar simultïneamente el seguimiento de varios parïmetros operativos de una mïquina.
La patente US2005/125183 describe un sistema para analizar la situaciïn de una mïquina provista de un eje giratorio y un punto de mediciïn que permite la comunicaciïn de una pieza del cliente con una pieza del proveedor. La pieza del cliente comprende: al menos un sensor en el punto de mediciïn, que genera datos de mediciïn dependientes de la rotaciïn del eje; un aparato que analiza la situaciïn de la mïquina en funciïn de los datos de mediciïn mediante el proceso de los datos de situaciïn y de los datos de mediciïn, incluida la realizaciïn de funciones de seguimiento de la situaciïn y el registro del uso de las mismas; una comunicaciïn mediante un puerto de comunicaciïn con el ordenador de la pieza del proveedor; una interfaz de entrada/salida del usuario acoplada al procesador de datos; un generador de peticiones para solicitar la cantidad de uso de al menos una funciïn de seguimiento de situaciones utilizando la interfaz, en donde el aparato analizador suministra la peticiïn al ordenador de la pieza del proveedor a travïs del puerto de comunicaciïn; un receptor de claves para al menos una funciïn de seguimiento de situaciones; un verificador de claves; y un dispositivo para cambiar un parïmetro que controla el uso permitido en respuesta a un cïdigo de claves aceptado.
La patente US2003/130810 describe sistemas y mïtodos para identificar la presencia de un defecto en maquinaria vibratoria. Por ejemplo, uno de estos mïtodos incluye el anïlisis de los datos de vibraciïn del espectro de frecuencias de la mïquina. Dicho mïtodo consiste en la obtenciïn de un ïndice de actividad armïnica basado en estimaciones de la energïa asociada al espectro de frecuencias y de la energïa asociada a la serie armïnica del defecto. El mïtodo puede incluir la obtenciïn de un valor K mediante la estimaciïn de un valor M indicativo de la energïa de la serie armïnica del defecto y la divisiïn de M por el nïmero de lïneas espectrales correspondientes a la serie armïnica del defecto. El mïtodo tambiïn puede incluir la obtenciïn de un valor R mediante la estimaciïn de un valor Q indicativo de la energïa contenida en los datos del espectro de frecuencias y la divisiïn de Q por el nïmero de lïneas espectrales de los datos del espectro de frecuencias. Dicho mïtodo comprende asimismo la obtenciïn del ïndice de actividad armïnica basado en los valores K y R estimados. Igualmente se describen sistemas relacionados para la ejecuciïn de los mïtodos.
La patente US200S/119840 describe un mïtodo para la vigilancia del buen estado de funcionamiento de un sistema que consiste en la realizaciïn de los pasos siguientes en diversos momentos: creaciïn de una identificaciïn de situaciïn a partir de diversos indicadores de situaciïn que incluyen (a) diversas mediciones de vibraciïn obtenidas del sistema, o (b) una o mïs mediciones de vibraciïn y una o mïs mediciones de parïmetros de rendimiento procedentes del sistema; predicciïn de una identificaciïn normal a partir de un modelo que define una o mïs interdependencias entre dichos indicadores de situaciïn, correspondiendo la identificaciïn normal a la identificaciïn de situaciïn para un sistema en buen estado de funcionamiento; comparaciïn de la identificaciïn de situaciïn con la identificaciïn normal; y registro de un evento si la identificaciïn de situaciïn difiere de la identificaciïn normal en una magnitud superior a un umbral predeterminado.
Resumen Se presentan un mïtodo y un sistema de vigilancia para seguir los parïmetros operativos de un sistema vigilado segïn se define en las reivindicaciones 1 y 10.
Los detalles de una o mïs formas de realizaciïn de la invenciïn se exponen en los dibujos adjuntos y en la descripciïn siguiente. Otras caracterïsticas, finalidades y ventajas de la invenciïn se desprenderïn de la descripciïn y los dibujos, asï como de las reivindicaciones.
Breve descripciïn de los dibujos La Figura 1 es una vista esquemïtica de una forma de realizaciïn correspondiente a un mïtodo y un aparato para la vigilancia de una mïquina mediante un sistema de seguimiento;
la Figura 2 es una vista esquemïtica de una forma de realizaciïn de una unidad sensora para ser utilizada en el sistema de seguimiento de la Figura 1;
la Figura 3A es una vista superior de una forma de realizaciïn de parte de una caja de unidad sensora;
la Figura 3B es una vista en planta de una forma de realizaciïn de una unidad sensora sin la parte reproducida en la Figura 3A;
la Figura 3C es una vista lateral de la parte reproducida en la Figura 3A;
la Figura 3D es una vista lateral de la unidad sensora de la Figura 3B sin la parte reproducida en la Figura 3A;
la Figura 4A es una vista en planta de una forma de realizaciïn de una unidad sensora que muestra una placa de circuitos impresos;
la Figura 4B es una vista lateral y parcialmente despiezada de la unidad sensora de la Figura 4A;
la Figura 5A es una vista en planta de otra forma de realizaciïn de una unidad sensora que muestra una placa de circuitos impresos;
la Figura 5B es una vista lateral de la unidad sensora de la Figura 5A;
la Figura 6 es una forma de realizaciïn de un organigrama de datos para un sistema de seguimiento; y
la Figura 7 es una forma de realizaciïn de un registro.
Descripciïn detallada A efectos de describir una forma de realizaciïn, la presente descripciïn se centrarï en el seguimiento de un tren de potencia de transmisiïn de potencia de un laminador. Sin embargo, esta forma de realizaciïn es un ejemplo y en modo alguno pretende ser la ïnica posible, porque puede efectuarse el seguimiento de otros tipos de mïquinas y trenes de potencia. Entre otras mïquinas y equipos que pueden ser objeto de seguimiento figuran, por ejemplo, transmisiones por engranajes para puente grïa, maquinaria de proceso como cizallas rotativas, aplanadoras y accionamientos de cizalla que incorporen transmisiïn de potencia, y otras aplicaciones para potencia de transmisiïn en las cuales pueda ser deseable el seguimiento de las situaciones operativas.
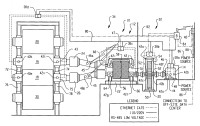
Haciendo referencia a la Figura 1, se muestra un tren de potencia de laminador 10 (por ejemplo, para laminar acero y otros metales) con un sistema de seguimiento 12 conectado al mismo. El tren de potencia de laminador 10 comprende un motor 14 conectado operativamente a los rodillos 16 y 18 por medio de una transmisiïn de potencia del tren de potencia que incluye un reductor de engranajes 20, un conjunto de piïïn 22 y los acoplamientos mostrados como acoplamientos de eje 24 y 26.Los cilindros de respaldo 28 y 30 se sitïan junto a los cilindros de trabajo 16 y 18 para formar un espacio o una doblez a travïs de los cuales pueda pasar una pieza a trabajar (por ejemplo, una plancha metïlica) durante una operaciïn de laminado. El motor 14 y el reductor de engranajes 20 estïn situados... [Seguir leyendo]
Reivindicaciones:
1.Un mïtodo de seguimiento de los parïmetros operativos de un sistema laminador (10) que incluye un cilindro de trabajo giratorio (16, 18) accionado por un dispositivo impulsor provisto de varios componentes de un tren de potencia de laminador (14, 20, 22, 25, 26) que incluyen un eje (24, 26) ; dicho mïtodo comprende:
la provisiïn de una primera unidad sensora (42, 44) en un primer componente de un tren de potencia de laminador (14, 20, 22) ; dicha primera unidad sensora (42, 44) incluye un sensor (92) para generar una seïal analïgica en respuesta a una situaciïn operativa del primer componente de un tren de potencia de laminador (14, 20, 22) y un procesador local integrado (90) para el tratamiento de la seïal analïgica generada por el sensor (92) ; dicho procesador local integrado (90) cuenta con un temporizador asociado;
el tratamiento de la seïal analïgica generada por el sensor (92) de la primera unidad sensora (42, 44) durante el funcionamiento del primer componente de un tren de potencia de laminador (14, 20, 22) utilizando el procesador local integrado (90) de la primera unidad sensora (42, 44) para producir un primer conjunto de muestras de seïales digitales con al menos un sello de tiempo correspondiente asociado a las mismas;
la comunicaciïn del primer conjunto de muestras de seïales digitales procedentes de la primera unidad sensora (42, 44) a una unidad de tratamiento remota (38, 40) alejada de la primera unidad sensora (42, 44) ; caracterizada por
la provisiïn de una segunda unidad sensora (46a, 46b) en el eje (24, 26) , donde la segunda unidad sensora (46a, 46b) gira con el eje (24, 26) , incluye un transmisor de RF (45) para comunicar el segundo conjunto de muestras de seïales digitales a la unidad de tratamiento remota al menos parcialmente por medio de seïales de comunicaciïn de RF, y comprende tanto un sensor (92) para generar una seïal analïgica en respuesta a una situaciïn operativa del eje (24, 26) como un procesador local integrado (90) para el tratamiento de la seïal analïgica generada por el sensor de la segunda unidad sensora (46a, 46b) ; dicho procesador local integrado (90) cuenta con un temporizador asociado;
el tratamiento de la seïal analïgica generada por el sensor (92) de la segunda unidad sensora (46a, 46b) durante el funcionamiento del eje (24, 26) , utilizando el procesador local integrado (90) de la segunda unidad sensora (46a, 46b) para producir un segundo conjunto de muestras de seïales digitales con al menos un sello de tiempo correspondiente asociado a las mismas; y
la comunicaciïn del segundo conjunto de muestras de seïales digitales procedentes de la segunda unidad sensora (46a, 46b) a la unidad de tratamiento remota (38, 40) , donde la unidad de tratamiento remota (38, 40) estï alejada de la segunda unidad sensora (46a, 46b) ,
donde la unidad de tratamiento remota (38, 40) sincroniza el primer conjunto de muestras de seïales digitales con el segundo conjunto de muestras de seïales digitales basïndose, al menos parcialmente, en los datos del sello de tiempo asociado a dichas muestras, y la unidad de tratamiento remota (38, 40) comprende un receptor de RF (47) asociado al transmisor de RF (45) .
2.El mïtodo de la reivindicaciïn 1, donde el receptor de RF (47) comprende una antena omnidireccional asociada.
3.El mïtodo de cualquier reivindicaciïn precedente, donde el sistema laminador (10) se encuentra en un edificio de fïbrica, la primera unidad sensora (42, 44) , la segunda unidad sensora (46a, 46b) y la unidad de tratamiento remota (38, 40) se encuentran dentro del edificio de fïbrica, la unidad de tratamiento remota (38, 40) asigna una fecha y hora al primer conjunto de muestras de seïales digitales y las transmite a travïs de una red informïtica global a un centro remoto de almacenamiento de datos (108, 110, 112) alejado del edificio de fïbrica, la unidad de tratamiento remota (38, 40) asigna una fecha y hora al segundo conjunto de muestras de seïales digitales y las transmite mediante la red informïtica global al centro remoto de almacenamiento de datos (108, 110, 112) .
4.El mïtodo de la reivindicaciïn 1 con inclusiïn del paso adicional consistente en la provisiïn de acceso remoto a datos operativos resultantes de la sincronizaciïn del primer conjunto de registros de seïales digitales y del segundo conjunto de registros de seïales digitales a travïs de un sitio web.
5.El mïtodo de cualquier reivindicaciïn precedente, donde el paso consistente en tratar la seïal analïgica generada por el sensor (92) de la primera unidad sensora (42, 44) durante el funcionamiento del primer componente de un tren de potencia de laminador (14, 20, 22) , utilizando el procesador local integrado (90) de la primera unidad sensora (42, 44) , incluye el muestreo de la seïal analïgica con un primer ïndice de muestreo fijo y la recogida de muestras de seïales digitales con un primer ïndice de notificaciïn modificable por una primera seïal de control recibida por la primera unidad sensora (42, 44) ; y
el paso consistente en tratar la seïal analïgica generada por el sensor (92) de la segunda unidad sensora (42, 44) durante el funcionamiento del eje (24, 26) , utilizando el procesador local integrado (90) de la segunda unidad sensora (46a, 46b) , incluye el muestreo de la seïal analïgica generada por el sensor (92) de la segunda unidad sensora (46a, 46b) con un segundo ïndice de muestreo fijo y la recogida de muestras de seïales digitales con un segundo ïndice de notificaciïn modificable a travïs de una segunda seïal de control recibida por la segunda unidad sensora (46a, 46b) .
6.El mïtodo de la reivindicaciïn 5, donde al menos uno de los ïndices de notificaciïn primero y segundo se modifica automïticamente en funciïn de la velocidad de rotaciïn de una ubicaciïn de obtenciïn de datos asociada.
7.El mïtodo de cualquier reivindicaciïn precedente, donde el primer conjunto de muestras de seïales digitales se empaqueta con un primer valor correspondiente de ïndice de notificaciïn y un primer valor correspondiente de sello de tiempo ïnico para una sola de las muestras de seïales digitales del primer conjunto, donde el segundo conjunto de muestras de seïales digitales se empaqueta con un segundo valor correspondiente de ïndice de notificaciïn y un segundo valor correspondiente de marca de tiempo ïnica para una sola de las muestras de seïales digitales del segundo conjunto.
8.El mïtodo de la reivindicaciïn 7 con inclusiïn del paso posterior consistente en la determinaciïn remota de un sello de tiempo correspondiente para cada una de las muestras de seïales digitales del primer conjunto en funciïn del primer valor correspondiente de ïndice de notificaciïn y del primer valor correspondiente de sello de tiempo ïnico, y en la determinaciïn remota de un sello de tiempo correspondiente para cada una de las muestras de seïales digitales del segundo conjunto en funciïn del segundo valor correspondiente de ïndice de notificaciïn y del segundo valor correspondiente de sello de tiempo ïnico.
9.El mïtodo de cualquiera de las reivindicaciones precedentes con inclusiïn asimismo del paso consistente en comparar un valor de datos procedente de la seïal analïgica generada por el sensor (92) de la primera unidad sensora (42, 44) con un valor de datos liminar utilizando el procesador local integrado (90) de la primera unidad sensora (42, 44) .
10.Un sistema de obtenciïn de datos para el seguimiento de los parïmetros operativos de un sistema laminador (10) que incluye un cilindro de trabajo giratorio (16, 18) accionado por un dispositivo impulsor provisto de varios componentes de un tren de potencia de laminador (14, 20, 22, 25, 26) que incluyen un eje (24, 26) ; dicho sistema de obtenciïn de datos comprende:
una primera unidad sensora (42, 44) montada localmente en un primer componente de un tren de potencia de un laminador (14, 20, 22) ; la primera unidad sensora (42, 44) comprende tanto un sensor (92) configurado para generar una seïal analïgica en respuesta a una situaciïn operativa del primer componente de un tren de potencia de un laminador (14, 20, 22) como un procesador local integrado (90) configurado para tratar la seïal analïgica generada por el sensor (92) durante el funcionamiento de la primera unidad sensora (42, 44) para producir un primer conjunto de muestras de seïales digitales, teniendo el procesador local integrado (90) un temporizador asociado y tratando la seïal analïgica generada por el sensor (92) de la primera unidad sensora (42, 44) durante el funcionamiento del primer componente de un tren de potencia de un laminador (14, 20, 22) para producir un primer conjunto de muestras de seïales digitales con al menos un sello de tiempo correspondiente asociado a las mismas, donde un ïndice de obtenciïn de datos y/o un ïndice de notificaciïn de datos de la primera unidad sensora (42, 44) son configurables mediante una o mïs seïales recibidas por la primera unidad sensora (42, 44) ; y caracterizïndose por
una segunda unidad sensora (46a, 46b) montada localmente en el eje (24, 26) ; la segunda unidad sensora (46a, 46b) comprende tanto un sensor (92) configurado para generar una seïal analïgica en respuesta a una situaciïn operativa del eje (24, 26) como un procesador local integrado (90) configurado para tratar la seïal analïgica generada por el sensor (92) de la segunda unidad sensora (46a, 46b) durante el funcionamiento de la segunda unidad sensora (46a, 46b) para producir un segundo conjunto de muestras de seïales digitales, teniendo el procesador local integrado (90) un temporizador asociado y tratando la seïal analïgica generada por el sensor (92) de la segunda unidad sensora (46a, 46b) durante el funcionamiento del eje (24, 26) para producir un segundo conjunto de muestras de seïales digitales con al menos un sello de tiempo correspondiente asociado a las mismas, donde un ïndice de obtenciïn de datos y/o un ïndice de notificaciïn de datos de la segunda unidad sensora (46a, 46b) son configurables mediante una o mïs seïales recibidas por la primera unidad sensora (42, 44) , girando el segundo sensor con el eje (24, 26) y comprendiendo un transmisor de RF (45) para comunicar el segundo conjunto de muestras de seïales digitales a una unidad de tratamiento remota (38, 40) al menos parcialmente por medio de seïales de comunicaciïn de RF,
donde la unidad de tratamiento remota (38, 40) estï alejada de la primera unidad sensora (42, 44) y de la segunda unidad sensora (46a, 46b) , comprende un receptor de RF asociado y recibe el primer conjunto de muestras de seïales digitales y el segundo conjunto de muestras de seïales digitales para sincronizar el primer conjunto de muestras de seïales digitales con el segundo conjunto de muestras de seïales digitales basïndose, al menos parcialmente, en los datos del sello de tiempo asociados a dicha muestra.
11.El sistema de obtenciïn de datos de la reivindicaciïn 10, que comprende ademïs un centro remoto de almacenamiento de datos (108, 110, 112) que recibe y almacena datos procedentes del primer conjunto de muestras de seïales digitales y del segundo conjunto de muestras de seïales digitales.
12.El sistema de obtenciïn de datos de la reivindicaciïn 10, donde el procesador local integrado (90) de la primera unidad sensora (42, 44) y el sensor de la primera unidad sensora (42, 44) estïn ubicados en una primera placa de circuitos comïn contenida en la primera unidad sensora (42, 44) .
13.El sistema de obtenciïn de datos de la reivindicaciïn 12, donde el procesador local integrado (90) de la segunda unidad sensora (46a, 46b) y el sensor (92) de la segunda unidad sensora (46a, 46b) estïn ubicados en una segunda placa de circuitos comïn contenida en la segunda unidad sensora (46a, 46b) .
14.El sistema de obtenciïn de datos de cualquiera de las reivindicaciones 10 a 13 que tambiïn comprende un primer comunicador (38a-d) alejado de la primera unidad sensora (42, 44) y en comunicaciïn con la misma; el primer comunicador (38a-d) comprende un procesador para tratar el primer conjunto de muestras de seïales digitales.
15.El sistema de obtenciïn de datos de la reivindicaciïn 14, donde la primera unidad sensora (42, 44) y el primer 5 comunicador estïn adaptados para comunicarse de manera inalïmbrica.
16.El sistema de obtenciïn de datos de la reivindicaciïn 15, donde la primera unidad sensora (42, 44) comprende una fuente de alimentaciïn local.
17.El sistema de obtenciïn de datos de la reivindicaciïn 14, que tambiïn comprende un segundo comunicador (38c) alejado de la segunda unidad sensora (46a, 46b) y en comunicaciïn con la misma utilizando una conexiïn alïmbrica; el segundo comunicador (38c) comprende un procesador para tratar el segundo conjunto de muestras de seïales digitales.
18.El sistema de obtenciïn de datos de la reivindicaciïn 17, donde el segundo comunicador (38c) alimenta la segunda unidad sensora (46a, 46b) utilizando la conexiïn alïmbrica.
19.El sistema de obtenciïn de datos de la reivindicaciïn 17, que tambiïn comprende una puerta (40) con un procesador para asignar un valor de fecha y hora al primer conjunto de muestras de seïales digitales y para asignar un valor de fecha y hora al segundo conjunto de muestras de seïales digitales.
20.El sistema de obtenciïn de datos de la reivindicaciïn 19, donde el sistema laminador (10) se encuentra en el edificio de fïbrica, la primera unidad sensora (42, 44) , la segunda unidad sensora (46a, 46b) , el primer comunicador (38a-d) , el segundo comunicador (38c) y la puerta (40) se encuentran en el edificio de fïbrica, y el primer conjunto de muestras de seïales digitales y el segundo conjunto de muestras de seïales digitales estïn comunicados desde la puerta (40) mediante una red informïtica global con un centro remoto de almacenamiento de datos (108, 110, 112) alejado del edificio de fïbrica.
Patentes similares o relacionadas:
Aparato para el procesamiento de datos, del 29 de Julio de 2020, de LSIS Co., Ltd: Un aparato de monitoreo de datos que monitorea los datos que se recopilan de unidades de terminal remota, RTU, , el aparato que comprende: […]
Dispositivo estándar y procedimiento de detección prematura de malfuncionamientos, del 14 de Julio de 2020, de RODRIGUEZ LOPEZ, Miguel Angel: Dispositivo autónomo y estándar, así como procedimiento de detección prematura de malfuncionamientos en equipos o maquinaria, estimación de vida remanente, evaluación […]
Sistema y procedimiento para estimar la vida útil restante de un dispositivo, del 1 de Julio de 2020, de GENERAL ELECTRIC COMPANY: Un sistema para estimar la vida útil de un dispositivo de potencia , comprendiendo dicho sistema: un sensor de temperatura acoplado a dicho […]
EQUIPO DE BOMBEO HIDRÁULICO MULTIETAPAS CON INTERNET DE LAS COSAS, del 25 de Junio de 2020, de BONASA COMERCIAL, S.A. DE C.V: La presente invención se refiere a un equipo de bombeo hidráulico multietapas con internet de las cosas que tiene la ventaja de tener integrado un controlador […]
Dispositivo de diagnóstico de estado en línea y método de diagnóstico de estado en línea para instalaciones de servicios de energía eléctrica, del 3 de Junio de 2020, de LSIS Co., Ltd: Un dispositivo de diagnóstico de estado en línea para instalaciones de servicios de energía eléctrica, que comprende un sensor de detección […]
Un método para la determinación de un indicador de rendimiento para un sistema de procesamiento, del 3 de Junio de 2020, de TETRA LAVAL HOLDINGS & FINANCE SA: Método para la detección de una ineficiencia en un sistema de procesamiento, estando dicho sistema de procesamiento dividido […]
Procedimiento y sistema para monitorizar un dispositivo médico, en particular dental, del 20 de Mayo de 2020, de W & H STERILIZATION S.R.L..: Procedimiento para monitorizar un dispositivo médico , en particular dental, que comprende un sinnúmero de componentes, en el que […]
Sistemas y métodos para la predicción rápida del agrietamiento inducido por hidrógeno (HIC) en tuberías, recipientes de presión y sistemas de tuberías, y para tomar medidas en relación con el mismo, del 13 de Mayo de 2020, de SAUDI ARABIAN OIL COMPANY: Un metodo para llevar a cabo evaluaciones de idoneidad para el servicio para una region de un activo que tiene una tasa de crecimiento de dano inducido por hidrogeno, el […]