Sistema de guiado de un dron en fase de aproximación a una plataforma en particular naval con vistas a su aterrizaje.
Sistema de guiado de un dron en fase de aproximación a una plataforma (1) con vistas a su aterrizaje,
quecomprende una cámara (6), conectada a unos medios (7) de análisis de imágenes y a unos medios (8) de cálculo deórdenes de mando destinadas a medios (9) de pilotaje automático del dron, estando dicha cámara (6), dichosmedios de análisis (7) y dichos medios de cálculo (8) instalados en el dron,
caracterizado porque:
- el sistema está destinado a equipar una plataforma naval formada por un buque de superficie (1),
- el sistema de guiado comprende un emisor de haces instalado sobre la plataforma, estando dicho emisor dehaces estabilizado en balanceo y en cabeceo sobre el buque, y emitiendo dicho emisor de haces un abanico(2) de haces ópticos de guiado sobre un sector angular predeterminado a partir de la horizontal, tal que:
- el abanico de haces de guiado comprende tres haces (3, 4, 5) de colores diferentes yuxtapuestos enelevación a partir de la horizontal,
- los haces presentan un ángulo de abertura en azimut de 30o,
- los haces están divididos en azimut en un primer sector angular a babor de 27o y en un segundo sectorangular de 3o a estribor del primer sector a babor,
- en el primer sector angular a babor, el primer haz (3) parpadea con un periodo de 1 segundo, el segundohaz (4) no parpadea y el tercer haz (5) parpadea con un periodo de 2 segundos, mientras que en elsegundo sector angular a estribor todos los haces (3, 4, 5) parpadean con un periodo de 0,5 segundos,
- la cámara (6) es una cámara de adquisición de haz y está conectada a los medios (7) de análisis deimágenes y a los medios (8) de cálculo de órdenes de mando con el fin de llevar al dron a seguir los haces deguiado,
- los medios (7) de análisis de imágenes están adaptados para suministrar a los medios de cálculo (8)informaciones de color del haz y de sector determinado a partir del periodo de parpadeo de éste, percibidaspor la cámara (6), y porque los medios de cálculo (8) de las órdenes de mando de los medios de pilotajeautomático del dron están adaptados para establecer las velocidades longitudinal Vx, lateral Vy y ascensionalVz de éste, según las relaciones siguientes:
- si el color del haz percibido es el del primer haz, entonces Vx ≥ Vcrucero* 0,22 y Vz ≥ Vzmax, siendoVcrucero la velocidad de crucero del dron y Vzmax su velocidad ascensional máxima, estando estas40 velocidades predeterminadas en m/s:
- si el color del haz percibido es el del segundo haz, entonces Vx ≥ Vcrucero* 3/5 y Vz ≥ Vzmax,
- si el color del haz percibido es el del tercer haz, entonces Vx ≥ Vcrucero* 3/5 y Vz ≥ -Vzmax, y
- si no se percibe ningún haz, entonces Vx ≥ 0 y Vz ≥ -Vzmax, y
- si el sector percibido es el primer sector a babor, entonces Vy ≥ -2,
- si el sector percibido es el segundo sector a estribor, entonces Vy ≥ 7, y
- si no se percibe ningún sector, entonces Vy ≥ 0.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2009/051953.
Solicitante: DCNS.
Nacionalidad solicitante: Francia.
Dirección: 40-42, rue du Docteur Finlay 75015 Paris FRANCIA.
Inventor/es: MORESVE,JULIEN PIERRE GUILLAUME.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64F1/20 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64F INSTALACIONES EN TIERRA O INSTALACIONES EN CUBIERTA DE PORTAAVIONES ESPECIALMENTE ADAPTADAS PARA SU USO EN CONEXIÓN CON AERONAVES; DISEÑO, FABRICACIÓN, ENSAMBLAJE, LIMPIEZA, MANTENIMIENTO O REPARACIÓN DE AERONAVES, NO PREVISTOS EN OTRO LUGAR; MANIPULACIÓN, TRANSPORTE, ENSAYO O INSPECCIÓN DE COMPONENTES DE AERONAVES, NO PREVISTOS EN OTRO LUGAR. › B64F 1/00 Instalaciones en tierra o instalaciones en cubierta de portaaviones (adaptadas especialmente para aeronaves cautivas B64F 3/00). › Disposición de balizas ópticas.
- G01S1/70 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 1/00 Balizas o sistemas de balizas que transmiten señales que tienen una o más características que pueden ser detectadas por receptores no direccionales y que definen direcciones, posiciones o líneas de posición fijas con relación a los transmisores de las balizas; Receptores asociados a ellas (fijación de la posición mediante la coordinación de una pluralidad de determinaciones de líneas de posición o direcciones G01S 5/00). › que utilizan ondas electromagnéticas que no sean ondas de radio.
- G08G5/02 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 5/00 Sistemas del control del tráfico aéreo. › Ayudas para el aterrizaje automático, es decir, sistemas en los que los datos de los vuelos de aviones que llegan son tratados para suministrar los datos de aterrizaje (ayudas al aterrizaje a bordo de aeronaves, o medidas de seguridad a bordo de la nave para evitar la colisión con la superficie de la tierra B64D 45/04; ayudas al aterrizaje visuales o acústicas en tierra o en cubierta de portaviones B64F 1/18).
PDF original: ES-2445698_T3.pdf
Fragmento de la descripción:
Sistema de guiado de un dron en fase de aproximación a una plataforma en particular naval con vistas a su aterrizaje.
La presente invención se refiere a un sistema de guiado de un dron en fase de aproximación a una plataforma.
Más particularmente, la invención se refiere a un sistema de guiado de un dron de este tipo en fase de aproximación a una plataforma, por ejemplo naval, en particular con vistas a su aterrizaje.
Se sabe que este problema de guiado es un problema crucial que ha dado lugar a desarrollos desde hace muchos años.
En efecto, se han propuesto ya soluciones de guiado para este tipo de aplicaciones a base de tecnologías GPS o radar.
Se conoce asimismo, en el estado de la técnica, en particular a partir del documento US no 4.385.354, un sistema de guiado de dron de acuerdo con el preámbulo de la reivindicación 1, destinado a guiar un dron para su aterrizaje sobre tierra firme.
Por otra parte, los documentos US no 5.287.104 y US no 6.239.725 describen unos sistemas de guiado de aeronaves pilotadas para su aterrizaje sobre una plataforma naval. No obstante, estos documentos no se refieren al guiado de un dron.
Sin embargo, en el marco de la aplicación particular a una plataforma naval, estos sistemas necesitan el dominio de esta plataforma y, en particular, el conocimiento de sus movimientos y sus equipamientos.
A estos problemas se añade una dificultad para garantizar la recuperación del dron, mientras que la posición de este dron se mide frecuentemente por GPS, cuya disponibilidad no está garantizada en cada momento debido a los saltos de constelación, los multitrayectos, o incluso las interferencias, etc.
Por tanto, el objetivo de la invención es resolver estos problemas.
Con este fin, la invención tiene por objeto un sistema de guiado de un dron según la reivindicación 1.
Según otros aspectos de la invención, el sistema de guiado comprende una o varias de las características siguientes:
- el primer haz es de color rojo, el segundo haz de color verde y el tercer haz de color amarillo,
- el primer haz presenta un ángulo de abertura en elevación de 4º, el segundo de 2º y el tercero de 8º,
-los medios de cálculo están adaptados para tener en cuenta la velocidad de desplazamiento de la plataforma. La invención se refiere asimismo a un conjunto de un dron y de una plataforma naval según la reivindicación 5. La invención se comprenderá mejor con la ayuda de la descripción siguiente dada únicamente a título de ejemplo y
hecha con referencia a los dibujos adjuntos, en los cuales:
- la figura 1 representa una plataforma naval equipada con una instalación de indicador de pendiente de descenso que entra en la constitución de un sistema de guiado según la invención.
- la figura 2 representa un abanico de haces ópticos emitidos por una instalación de este tipo,
- las figuras 3, 4 y 5 ilustran la trayectoria ideal a seguir por un dron durante su guiado, y
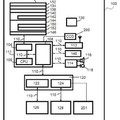
- la figura 6 ilustra un esquema sinóptico que muestra diferentes medios integrados en un dron para asegurar este seguimiento.
En efecto, se ha ilustrado en la figura 1 un sistema de guiado de un dron en fase de aproximación de una plataforma, en particular naval.
Esta plataforma está designada por la referencia general 1 en esta figura y presenta, por ejemplo en la parte trasera, una zona de aterrizaje del dron.
De hecho, esta plataforma está equipada con una instalación de indicador de pendiente de descenso, que emite un abanico de haces ópticos de guiado, sobre un sector angular predeterminado a partir de la horizontal.
Por su lado, el dron está equipado con una cámara de adquisición de haces, conectada a unos medios de análisis de imágenes y a unos medios de cálculo de órdenes de mando destinadas a medios de pilotaje automático de este 5 dron, con el fin de inducirle a seguir los haces de guiado.
En esta figura 1, el abanico de haces ópticos de guiado está designado por la referencia general 2.
De hecho, el abanico de haces de guiado puede comprender tres haces de colores diferentes yuxtapuestos en 10 elevación a partir de la horizontal, como, por ejemplo, los haces designados por las referencias 3, 4 y 5, respectivamente, en esta figura 1.
El primer haz 3 puede ser entonces de un color ojo, el segundo haz 4 de un color verde y el tercer haz 5 de un color amarillo. 15 Además, el primer haz puede presentar un ángulo de abertura en elevación de 4º, el segundo de 2º y el tercero de 8º .
Estos haces pueden presentar asimismo un ángulo de abertura en azimut de 30º, estando estos haces divididos en 20 azimut en un primer sector angular a babor de 27º y en un segundo sector angular de 3º a estribor del primer sector a babor.
Por otra parte, los haces en los diferentes sectores así definidos pueden parpadear asimismo con periodos diferentes.
Así, por ejemplo, en el primer sector angular a babor el haz rojo puede parpadear con un periodo de 1 segundo, el haz verde no parpadea, mientras que el haz amarillo puede parpadear con un periodo de 2 segundos.
En el segundo sector angular a estribor, todos los haces parpadean con un periodo de 0, 5 segundos.
Esto está esquematizado en la figura 2 en la que se reconocen, en efecto, el primer, segundo y tercer haces, respectivamente 3, 4 y 5, de colores rojo, verde y amarillo, respectivamente.
Se ha ilustrado asimismo en esta figura 2 la abertura en azimut de 30º de estos haces con el primer sector de 27º y 35 el segundo sector de 3º.
Se concibe entonces, como se ilustra en las figuras 3, 4 y 5, que se pueda definir una trayectoria ideal del dron en aproximación a la plataforma, haciendo que siga un raíl tal como el ilustrado, en trazo más grueso, en estas figuras, en la unión entre los sectores a babor y a estribor del segundo y tercer haces ópticos.
Con este fin, el dron está equipado, como se ilustra en la figura 6, con una cámara de adquisición de haces designada por la referencia general 6 en esta figura, cuya salida está conectada a unos medios de análisis de imágenes designados por la referencia general 7.
Estos medios de análisis están conectados a su vez a unos medios de cálculo de órdenes de mando destinadas a medios de pilotaje automático del dron, con el fin de llevarle a seguir los haces de guiado, estando los medios de cálculo de órdenes designados por la referencia general 8 y estando los medios de pilotaje automático del dron designados por la referencia general 9.
Se concibe entonces que esta cadena permita que los medios de análisis de imágenes suministren a los medios de cálculo informaciones de color del haz y de sector determinado a partir del periodo de parpadeo de éste, tal como son percibidas por la cámara, de manera que los medios de cálculo de las órdenes de mando de los medios de pilotaje automático del dron establezcan unas velocidades longitudinal Vx, lateral Vy y ascensional Vz de este dron.
El algoritmo de cálculo de estas diferentes velocidades puede ser entonces el siguiente:
Si el color del haz percibido es rojo, entonces Vx = Vcrucero*0, 22 y Vz = Vzmax, siendo Vcrucero la velocidad de crucero del dron y Vzmax su velocidad ascensional máxima, estando estas velocidades predeterminadas en metros/segundo, por ejemplo, por el constructor del dron.
Por el contrario, si el color del haz percibido es verde, entonces Vx = Vcrucero*3/5 y Vz = Vzmax.
Por último, si el color del haz percibido es amarillo, entonces Vx = Vcrucero*3/5 y Vz = -Vzmax.
Por el contrario, si no se percibe ningún haz, entonces Vx = 0 y Vz = -Vzmax.
Asimismo, si el sector percibido es el primer sector a babor, entonces Vy = -2 y si el sector percibido es el segundo sector a estribor, entonces Vy = 7.
Si no se percibe ningún sector, entonces Vy se establece en 0.
Se concibe entonces que estas órdenes de pilotaje permitan que el dron siga, con una precisión más o menos importante, la trayectoria ideal tal como se ha definido anteriormente.
Se observará asimismo que en el caso de que la plataforma sea un buque, tal como, por ejemplo, un buque de superficie, la instalación de indicador de pendiente de descenso se estabiliza entonces en balanceo y en cabeceo de forma clásica.
Asimismo, se pueden adaptar los medios de cálculo para tener en cuenta la velocidad de desplazamiento de la plataforma para mejorar aún más la precisión del seguimiento de trayectoria.
Se concibe entonces que en un sistema de este tipo, estos medios permitan observar los parpadeos del indicador de pendiente de descenso, a través de la cámara... [Seguir leyendo]
Reivindicaciones:
1. Sistema de guiado de un dron en fase de aproximación a una plataforma (1) con vistas a su aterrizaje, que comprende una cámara (6) , conectada a unos medios (7) de análisis de imágenes y a unos medios (8) de cálculo de órdenes de mando destinadas a medios (9) de pilotaje automático del dron, estando dicha cámara (6) , dichos medios de análisis (7) y dichos medios de cálculo (8) instalados en el dron,
caracterizado porque:
- el sistema está destinado a equipar una plataforma naval formada por un buque de superficie (1) ,
- el sistema de guiado comprende un emisor de haces instalado sobre la plataforma, estando dicho emisor de haces estabilizado en balanceo y en cabeceo sobre el buque, y emitiendo dicho emisor de haces un abanico
(2) de haces ópticos de guiado sobre un sector angular predeterminado a partir de la horizontal, tal que: 15
- el abanico de haces de guiado comprende tres haces (3, 4, 5) de colores diferentes yuxtapuestos en elevación a partir de la horizontal,
- los haces presentan un ángulo de abertura en azimut de 30º,
- los haces están divididos en azimut en un primer sector angular a babor de 27º y en un segundo sector angular de 3º a estribor del primer sector a babor,
- en el primer sector angular a babor, el primer haz (3) parpadea con un periodo de 1 segundo, el segundo
haz (4) no parpadea y el tercer haz (5) parpadea con un periodo de 2 segundos, mientras que en el segundo sector angular a estribor todos los haces (3, 4, 5) parpadean con un periodo de 0, 5 segundos,
- la cámara (6) es una cámara de adquisición de haz y está conectada a los medios (7) de análisis de imágenes y a los medios (8) de cálculo de órdenes de mando con el fin de llevar al dron a seguir los haces de guiado,
- los medios (7) de análisis de imágenes están adaptados para suministrar a los medios de cálculo (8) informaciones de color del haz y de sector determinado a partir del periodo de parpadeo de éste, percibidas por la cámara (6) , y porque los medios de cálculo (8) de las órdenes de mando de los medios de pilotaje
automático del dron están adaptados para establecer las velocidades longitudinal Vx, lateral Vy y ascensional Vz de éste, según las relaciones siguientes:
- si el color del haz percibido es el del primer haz, entonces Vx = Vcrucero* 0, 22 y Vz = Vzmax, siendo Vcrucero la velocidad de crucero del dron y Vzmax su velocidad ascensional máxima, estando estas velocidades predeterminadas en m/s:
- si el color del haz percibido es el del segundo haz, entonces Vx = Vcrucero* 3/5 y Vz = Vzmax,
-si el color del haz percibido es el del tercer haz, entonces Vx = Vcrucero* 3/5 y Vz = -Vzmax, y 45
- si no se percibe ningún haz, entonces Vx = 0 y Vz = -Vzmax, y
- si el sector percibido es el primer sector a babor, entonces Vy = -2,
- si el sector percibido es el segundo sector a estribor, entonces Vy = 7, y
- si no se percibe ningún sector, entonces Vy = 0.
2. Sistema de guiado de un dron en fase de aproximación a una plataforma naval en particular con vistas a su 55 aterrizaje, según la reivindicación 1, caracterizado porque el primer haz (3) es de color rojo, el segundo haz (4) es de color verde y el tercer haz (5) es de color amarillo.
3. Sistema de guiado de un dron en fase de aproximación a una plataforma naval en particular con vistas a su aterrizaje, según la reivindicación 1 o 2, caracterizado porque el primer haz (3) presenta un ángulo de abertura en elevación de 4º, el segundo (4) de 2º y el tercero (5) de 8º.
4. Sistema de guiado de un dron en fase de aproximación a una plataforma naval en particular con vistas a su aterrizaje, según cualquiera de las reivindicaciones anteriores, caracterizado porque los medios de cálculo (8) están adaptados para tener en cuenta la velocidad de desplazamiento de la plataforma.
5. Conjunto de un dron y una plataforma naval, caracterizado porque comprende un sistema de guiado del dron en fase de aproximación a la plataforma con vistas a su aterrizaje según cualquiera de las reivindicaciones anteriores, y en el que:
-la plataforma está equipada con el emisor de haces, y
-el dron está equipado con la cámara (6) , los medios de análisis (7) y los medios de cálculo (8) .
Patentes similares o relacionadas:
SISTEMA INTERIOR DE LOCALIZACION EN ENTORNOS METÁLICOS., del 27 de Junio de 2018, de SKYLIFE ENGINEERING, S.L: Sistema interior de localización en entornos metálicos basado en un sistema de posicionamiento destinado a entornos donde la recepción de señales […]
Métodos y aparatos para determinar una posición utilizando fuentes de luz, del 20 de Septiembre de 2017, de THE BOEING COMPANY: Un método, que comprende: procesar, a través de un circuito lógico que comprende una pluralidad de extractores de código, una salida de un fotodetector […]
Sistema y procedimiento para averiguar una posición de un objeto móvil, disposición de ledes de iluminación general y sensor de luz para una averiguación de posición de un objeto móvil, del 28 de Septiembre de 2016, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Sistema para averiguar una posición de un objeto móvil , con las siguientes características: una disposición de al menos tres ledes de iluminación […]
Método y sistema para determinar una posición relativa con respecto a un objetivo, del 20 de Abril de 2016, de AIRBUS DEFENCE AND SPACE, S.A.U: Método para determinar la dirección angular relativa θ entre un objetivo y un transmisor , comprendiendo el método las siguientes etapas: […]
 Determinación de distancia o posición, del 16 de Marzo de 2016, de Philips Lighting Holding B.V: Un dispositivo que comprende:
una entrada para recibir datos de imagen capturados por una cámara , comprendiendo los datos de imagen una imagen de una fuente […]
Determinación de distancia o posición, del 16 de Marzo de 2016, de Philips Lighting Holding B.V: Un dispositivo que comprende:
una entrada para recibir datos de imagen capturados por una cámara , comprendiendo los datos de imagen una imagen de una fuente […]
 Método de localización en espacios interiores basado en detección y emparejamiento de puntos de luz, del 26 de Mayo de 2015, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC): Método de localización en espacios interiores basado en detección y emparejamiento de puntos de luz que comprende obtener un mapa de puntos de luz de un recinto; […]
Método de localización en espacios interiores basado en detección y emparejamiento de puntos de luz, del 26 de Mayo de 2015, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC): Método de localización en espacios interiores basado en detección y emparejamiento de puntos de luz que comprende obtener un mapa de puntos de luz de un recinto; […]
 Método, sistema y producto informático para la orientación espacial de personas, del 21 de Mayo de 2015, de BRUSILOVSKY FILER, Berta Liliana: Método, un sistema y un producto informático para la orientación espacial de personas, aplicable a teléfonos móviles inteligentes, para la orientación en espacios urbanos o edificados […]
Método, sistema y producto informático para la orientación espacial de personas, del 21 de Mayo de 2015, de BRUSILOVSKY FILER, Berta Liliana: Método, un sistema y un producto informático para la orientación espacial de personas, aplicable a teléfonos móviles inteligentes, para la orientación en espacios urbanos o edificados […]
DISPOSITIVO PARA EL RECONOCIMIENTO DE UN PELIGRO DE COLISION ENTRE DOS OBJETOS MOVILES RELATIVAMENTE ENTRE SI, ESPECIALMENTE VEHICULOS., del 1 de Mayo de 2007, de MARINITSCH, WALDEMAR: Dispositivo para el reconocimiento de un peligro de colisión entre al menos dos objetos móviles relativamente entre sí, en el que en cada […]