SISTEMA DE TRACCIÓN PARA VEHÍCULO.
Sistema de tracción para vehículo.
La invención se refiere a sistema de tracción de un vehículo a lo largo de una trayectoria prefinida.
El sistema de tracción objeto de la invención comprende un motor lineal síncrono que está comprendido por:
- un elemento móvil comprendido por imanes permanentes que es desplazable y que se dispone unido al vehículo de modo que el elemento móvil arrastra al vehículo;
- un estátor que comprende unidades independientes comprendidas por al menos un núcleo y una bobina de inducción de un campo electromagnético desplazable de modo que el elemento móvil es arrastrado por tracción de la fuerza del campo electromagnético inducido siguiendo el desplazamiento del campo electromagnético.
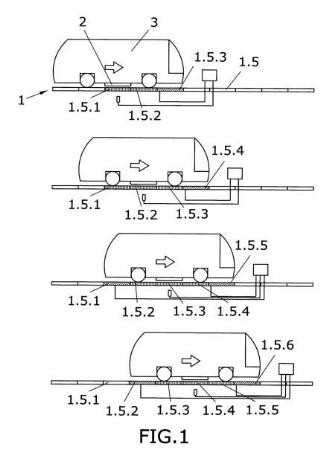
Caracteriza a la invención el que el estátor se sitúa bajo una superficie que es la superficie de desplazamiento del elemento móvil y que únicamente las unidades independientes que se encuentran bajo la proyección del vehículo sobre el estator están energizadas.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200901620.
Solicitante: SIEMENS, S.A..
Nacionalidad solicitante: España.
Inventor/es: LORENZO VILLANOVA,JUAN CARLOS, RIVAS CONDE,JAVIER JOSÉ MARÍA, SÁNCHEZ HERRADÓN,LUIS MARIANO, DE SANTIAGO CID,JOSÉ IGNACIO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60L13/03 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60L PROPULSION DE VEHICULOS PROPULSADOS ELECTRICAMENTE (disposición o montaje de conjuntos de propulsión eléctrica o de varios motores principales diferentes para una propulsión recíproca o común sobre los vehículos B60K 1/00, B60K 6/20; disposición o montaje de la transmisión eléctrica en los vehículos B60K 17/12, B60K 17/14; prevención del patinado de las ruedas reduciendo la fuerza motriz en vehículos sobre raíles B61C 15/08; máquinas dinamoeléctricas H02K; control o regulación de motores H02P ); SUMINISTRO DE LA ENERGIA ELECTRICA AL EQUIPO AUXILIAR DE VEHICULOS PROPULSADOS ELECTRICAMENTE (circuitos eléctricos para el acoplamiento de vehículos B60D 1/64; calefacción eléctrica para vehículos B60H 1/00 ); SISTEMAS DE FRENOS ELECTRODINAMICOS PARA VEHICULOS, EN GENERAL (control o regulación de motores H02P ); SUSPENSION O LEVITACION MAGNETICAS PARA VEHICULOS; CONTROL DE LOS PARAMETROS DE FUNCIONAMIENTO SOBRE LOS VEHICULOS PROPULSADOS ELECTRICAMENTE; DISPOSITIVOS ELECTRICOS DE SEGURIDAD SOBRE VEHICULOS PROPULSADOS ELECTRICAMENTE. › B60L 13/00 Propulsión eléctrica para vehículos monorail, vehículos suspendidos o ferrocarriles de cremallera; Suspensión o levitación magnéticas para vehículos. › Propulsión eléctrica para motores lineares.
- B60M1/10 B60 […] › B60M LINEAS DE SUMINISTRO DE CORRIENTE O DISPOSITIVOS A LO LARGO DE LA VIA PARA VEHICULOS PROPULSADOS ELECTRICAMENTE (controles de agujas o dispositivos de seguridad a lo largo de la vía B61L; estructura en general de raíles o agujas E01B). › B60M 1/00 Líneas de suministro de energía en contacto con el colector llevado por el vehículo (colectores con este fin B60L 5/00). › Disposiciones para dar tensión o cortar a secciones de la línea de energía, por efecto magnético provocado por el paso del vehículo.
- H02K41/03 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02K MAQUINAS DINAMOELECTRICAS (relés dinamoeléctricos H01H 53/00; transformación de una potencia de entrada en DC o AC en una potencia de salida de choque H02M 9/00). › H02K 41/00 Sistemas de propulsión en los cuales un elemento rígido se desplaza a lo largo de un camino bajo los efectos de la acción dinamoeléctrica que se ejercen entre este elemento y un flujo magnético que se propaga a lo largo del camino. › Motores síncronos; Motores paso a paso; Motores de reluctancia (H02K 41/035 tiene prioridad).
Fragmento de la descripción:
Sistema de tracción para vehículo.
Objeto de la invención
La presente invención se refiere a sistema de tracción de un vehículo a lo largo de una trayectoria prefinida. Se entiende por vehículo en esta invención cualquier elemento adecuado para el transporte de cargas o de personas.
El sistema de tracción objeto de la invención comprende:
• un motor lineal síncrono que está comprendido por:
• unos medios de determinación de la posición del vehículo;
• unos medios de conmutación de la alimentación de la corriente de las unidades independientes; y
• unos medios de control que activan la alimentación mediante los medios de conmutación de determinadas unidades independientes en función de la posición del vehículo.
Caracteriza a la invención el que el estátor se sitúa bajo una superficie que es la superficie de desplazamiento del elemento móvil y que los medios de control son tales que la conmutación de la alimentación de las unidades independientes determina la alimentación únicamente de unidades independientes que se encuentran bajo la proyección del vehículo sobre el estátor.
De este modo el sistema objeto de la invención energiza únicamente aquellas unidades independientes que en cada momento de desplazamiento del vehículo están situadas bajo la proyección del vehículo mientras que aquellas que se sitúan fuera de la proyección del vehículo no están energizadas y por lo tanto no generan un campo electromagnético que podría afectar a otros elementos colindantes distintos del vehículo.
Antecedentes de la invención
Son conocidos en el estado de la técnica motores lineales cuyo elemento móvil está asociado al desplazamiento de un vehículo. Algunos de los sistemas de tracción que comprenden un motor lineal síncrono consisten en un elemento móvil constituido por imanes permanentes y un estátor que comprende unidades independientes formadas por núcleos y bobinas de inducción de un campo electromagnético de modo que el elemento móvil es arrastrado por tracción de la fuerza del campo electromagnético inducido siguiendo el desplazamiento del campo electromagnético.
Se cita como ejemplo de este tipo de sistemas la solicitud de patente WO2004030975 relativa a un sistema de suspensión, guiado y propulsión de vehículos utilizando fuerzas magnéticas.
Normalmente estos sistemas constan también de unos medios de determinación de la posición del vehículo, así como de unos medios de conmutación de la alimentación de la corriente de las unidades independientes y de unos medios de control que activan la alimentación en función de la posición del vehículo.
Sin embargo existe la necesidad de integrar este tipo de sistemas de tracción en áreas transitadas, como pueden ser, calles de ciudades o almacenes de manipulación de cargas. Actualmente los sistemas conocidos no han podido ser integrados en estos entornos ya que normalmente comprenden vías que necesitan estar situadas en un espacio confinado y esto interferiría con el resto del tránsito, unido a que los trabajos previos de obra civil pueden hacer inadecuado su empleo en determinadas zonas como, por ejemplo, en centros históricos de ciudades.
Son también conocidos otros sistemas que sí han sido integrados en zonas transitadas como aquellos que hacen uso de un cable de catenaria para su desplazamiento. Estos sistemas de transporte tienen la desventaja de que provocan un gran impacto, tanto visual como físico, en el entorno, debido al uso del propio cable de catenaria.
La presente invención resuelve el anterior problema técnico mediante un sistema de tracción de un vehículo que permite su integración en áreas transitadas. Además posee la ventaja de no generar emisiones y minimizar el ruido.
Descripción de la invención
El desplazamiento del vehículo se realiza a lo largo de una trayectoria predefinida. Este desplazamiento se realiza gracias a la fuerza de tracción de un motor lineal síncrono.
Por vehículo se entiende cualquier dispositivo que sea útil para el transporte de cargas o personas, por ejemplo, un vehículo de transporte colectivo, un contenedor de cargas o incluso un elemento de transporte de menor tamaño adecuado para la manipulación de material en un almacén.
El motor lineal que permite la tracción del vehículo genera un campo electromagnético que viaja a lo largo de la trayectoria y para ello comprende:
• un elemento móvil comprendido por imanes permanentes que es desplazable siguiendo la trayectoria predefinida y que se dispone unido al vehículo de modo que el elemento móvil arrastra al vehículo;
• un estátor que comprende unidades independientes comprendidas por al menos un núcleo y una bobina de inducción de un campo electromagnético donde:
Adicionalmente el sistema objeto de la invención comprende también:
• unos medios de determinación de la posición del vehículo;
• unos medios de conmutación de la alimentación de la corriente de las unidades independientes;
• unos medios de control que activan la alimentación mediante los medios de conmutación de determinadas unidades independientes en función de la posición del vehículo.
Caracteriza a la invención el que el estátor se encuentra situado bajo una superficie que es la de desplazamiento del elemento móvil y que los medios de control son tales que la conmutación de la alimentación de las unidades independientes determina la alimentación únicamente de unidades independientes que se encuentran bajo la proyección del vehículo sobre el estátor. Esta proyección incluye también la o las unidades independientes situadas bajo el elemento móvil.
Bajo la superficie indica que puede estar adyacente, es decir, a ras de superficie, o bien distanciado de ésta hacia el interior de la misma. El hecho de que el estátor se sitúe bajo la superficie de desplazamiento permite que pueda existir tránsito sobre el propio estátor distinto del elemento móvil del motor lineal. Por lo tanto este hecho permite la integración del sistema de tracción objeto de la invención en áreas de tránsito, como pueden ser, por ejemplo, calles de ciudades, que pueden poseer tráfico rodado y circulación de peatones.
Al energizar las unidades situadas bajo la proyección del vehículo únicamente en este área se crea un campo electromagnético de modo que fuera de la proyección del vehículo no existe el mencionado campo electromagnético al no estar energizadas las bobinas, por lo que se evita que el resto de la trayectoria constituida por las unidades independientes pueda interferir con elementos o personas que puedan circular sobre ella.
El hecho de que únicamente se energicen aquellas unidades independientes situadas bajo la proyección del vehículo no implica necesariamente que todas y cada una de las unidades independientes situadas bajo la mencionada proyección estén energizadas, sino que...
Reivindicaciones:
1. Sistema de tracción para vehículo a lo largo de una trayectoria prefinida que comprende un motor lineal síncrono que a su vez comprende:
donde el sistema comprende adicionalmente:
caracterizado porque
el estátor (1) se sitúa bajo una superficie, bien adyacente bien distanciado de ésta, que es la superficie de desplazamiento del elemento móvil (2) y los medios de control son tales que la conmutación de la alimentación de las unidades independientes (1.5) determina la alimentación únicamente de unidades independientes (1.5) que se encuentran bajo la proyección del vehículo (3) sobre el estátor (1) incluidas la o las unidades independientes (1.5) situadas bajo el elemento móvil (2).
2. Sistema según la reivindicación 1, caracterizado porque es un motor lineal síncrono trifásico.
3. Sistema según cualquiera de las reivindicaciones anteriores donde el elemento móvil (2) se encuentra unido a la parte inferior del vehículo (3).
4. Sistema según cualquiera de las reivindicaciones anteriores donde las unidades independientes (1.5) se encuentran embebidas en bloques (1.3) de material dieléctrico.
5. Sistema según cualquiera de las reivindicaciones anteriores donde el núcleo (1.1) de la unidad independiente (1.5) comprende medios para contrarrestar las fuerzas de atracción entre el estátor (1) y el elemento móvil (2).
6. Sistema según la reivindicación 5 caracterizado porque los medios para contrarrestar las fuerzas de atracción entre el estátor (1) y el elemento móvil (2) son:
7. Sistema según las reivindicaciones 4 y 6 donde uno o más bloques (1.3) de material dieléctrico se disponen integrados en un bloque (1.4) de hormigón de tal modo que los núcleos (1.1) de los bloques (1.3) de resina se disponen alineados de modo que definen la trayectoria de desplazamiento del vehículo (3).
8. Sistema según la reivindicación 7 donde los bloques (1.4) de hormigón comprenden al menos un orificio (1.4.1) para una línea de alimentación de la unidad independiente (1.5).
9. Sistema según la reivindicación 7 donde los bloques (1.3) de material dieléctrico tienen sus esquinas achaflanadas con el objeto de favorecer el ajuste entre bloques (1.3, 1.4) consecutivos en trayectorias curvas.
10. Sistema según la reivindicación 9 donde los espacios entre chaflanes de bloques (1.3) de material dieléctrico dispuestos consecutivos comprenden una cuña de material ferromagnético para mejorar la continuidad del flujo electromagnético.
11. Sistema según cualquiera de las reivindicaciones anteriores donde el elemento móvil (2) comprende imanes permanentes según una configuración Halbach (2.1).
12. Sistema según cualquiera de las reivindicaciones anteriores donde la disposición de imanes permanentes del elemento móvil (2) está comprendida en una jaula que permite su confinamiento de sujeción.
13. Sistema según cualquiera de las reivindicaciones anteriores donde el elemento móvil (2) dispone de un apantallamiento del campo magnético de tal modo que por encima del apantallamiento es donde se encuentra el vehículo (3).
14. Sistema según cualquiera de las reivindicaciones anteriores donde las unidades independientes (1.5) están formadas por un núcleo ferromagnético (1.1) configurado según un bloque del que emergen una pluralidad de proyecciones (1.1.1) paralelas y esencialmente equidistribuidas sobre las que se sitúan las bobinas (1.2) de inducción.
15. Sistema según las reivindicaciones 2 y 14 caracterizado porque el estátor (1) comprende seis bobinas (1.2) dos por cada fase de la corriente, circulando la corriente en una de ellas en sentido contrario.
16. Sistema según cualquiera de las reivindicaciones anteriores caracterizado porque el elemento móvil (2) se desplaza sobre la superficie manteniendo un rango predefinido de distancias con el estátor (1).
17. Sistema según la reivindicación 16 donde el elemento móvil (2) comprende elementos de rodadura (2.1) que definen la distancia mínima entre dicho elemento móvil (2) y la superficie sobre la que se desplaza el vehículo (3).
18. Sistema según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende subestaciones que comprenden un autómata de control destinado a recibir las señales de los medios de determinación de la posición del vehículo (3) y energizar las unidades independientes (1.5) correspondientes y un convertidor de corriente de alimentación de las bobinas que permite variar la frecuencia.
Patentes similares o relacionadas:
Vía férrea, vehículo ferroviario para circular en la vía férrea y conjunto que comprende la vía férrea y el vehículo ferroviario, del 2 de Octubre de 2019, de ALSTOM Transport Technologies: Vía férrea de tranvía, que comprende dos filas de raíles paralelas que se extienden según una línea media longitudinal (L) y que están […]
Segmento de estator para un sistema de transporte de motor lineal y sistema de transporte, del 11 de Septiembre de 2019, de SIEMENS AKTIENGESELLSCHAFT: Segmento de estator diseñado para un sistema de transporte de motor lineal para alojar al menos un rotor de transporte (T1), que comprende - un agente para […]
Carril-Arqueta para soterrar el estator de un motor lineal de imanes permanentes, del 4 de Septiembre de 2017, de FUNDACION UNIVERSITARIA SAN PABLO CEU: 1. Carril-arqueta para soterrar el estator de un motor lineal de imanes permanentes en disposición Halbach, para un nuevo sistema de transporte […]
Sistema y método de transporte de mercancías, del 17 de Mayo de 2017, de THE TEXAS A & M UNIVERSITY SYSTEM: Un sistema de transporte de mercancías, que comprende: una vía , un par de carriles y una placa de reacción de motor lineal dispuesta […]
Sistema de accionamiento con transferencia de energía electromagnética, del 5 de Abril de 2017, de TETRA LAVAL HOLDINGS & FINANCE S.A.: Sistema de accionamiento con transferencia de energía electromagnética, que comprende: una vía que comprende una pluralidad de estatores , teniendo cada estator […]
CARRIL-ARQUETA PARA SOTERRAR EL ESTATOR DE UN MOTOR LINEAL DE IMANES PERMANENTES, del 9 de Agosto de 2016, de FUNDACION UNIVERSITARIA SAN PABLO CEU: Carril-arqueta para soterrar el estator de un motor lineal de imanes permanentes para un nuevo sistema de transporte público urbano, constituido mediante la unión de módulos […]
Sistema de transporte que comprende un vehículo eléctrico cargado por motor lineal, del 3 de Agosto de 2016, de GENERAL ATOMICS: Sistema para mover un vehículo a lo largo de una calzada que comprende: por lo menos un segmento de potencia que tiene un devanado de múltiples […]
 Suministro a un vehículo con energía eléctrica usando un dispositivo receptor adaptado para recibir un campo electromagnético alterno, del 3 de Febrero de 2016, de Bombardier Primove GmbH: Una instalación para proporcionar a un vehículo con energía eléctrica, en el que la instalación comprende un dispositivo receptor adaptado […]
Suministro a un vehículo con energía eléctrica usando un dispositivo receptor adaptado para recibir un campo electromagnético alterno, del 3 de Febrero de 2016, de Bombardier Primove GmbH: Una instalación para proporcionar a un vehículo con energía eléctrica, en el que la instalación comprende un dispositivo receptor adaptado […]