Rotor Magnus y procedimiento para su operación.
Rotor Magnus (8) con un accionamiento (26) para el accionamiento del rotor Magnus (8) y un control(24) para el control del accionamiento (26) de tal manera que el rotor Magnus (8) alcanza una velocidad de contornoa la que se ajusta una relación velocidad periférica / velocidad del viento en el intervalo de 5 a 20,
caracterizadoporque en el contorno exterior inferior del rotor Magnus (8) están dispuestos al menos tres rodillos de guiado (12),que están en contacto sin holgura con el rotor Magnus (8), y porque el control (24) está equipado para derivar larelación velocidad periférica / velocidad del viento a partir de una velocidad del viento media determinada a lo largode un intervalo de tiempo prefijado.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/004816.
Solicitante: Wobben Properties GmbH.
Nacionalidad solicitante: Alemania.
Dirección: Dreekamp 5 26605 Aurich ALEMANIA.
Inventor/es: WOBBEN, ALOYS, ROHDEN,ROLF.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63H9/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63H PROPULSION O GOBIERNO MARINO (propulsión de vehículos de colchón de aire B60V 1/14; especialmente adaptados para submarinos que no sean de propulsión nuclear, B63G; especialmente adaptados para torpedos F42B 19/00). › B63H 9/00 Propulsión marina generada directamente por energía eólica (motores eólicos que accionan elementos propulsores sumergidos B63H 13/00). › que utilizan el efecto Magnus.
PDF original: ES-2415834_T3.pdf
Fragmento de la descripción:
Rotor Magnus y procedimiento para su operación.
La presente invención se refiere a un rotor Magnus, con un accionamiento y un control, que controla el accionamiento de tal manera que el rotor Magnus alcanza una velocidad de contorno que es mayor en un factor I (relación velocidad periférica / velocidad del viento) que la velocidad media del viento. Además, la presente invención se refiere a un procedimiento para la operación de un rotor Magnus con un accionamiento que pone a rotar el rotor Magnus, y un control, así como un barco.
Los rotores Magnus se conocen en el estado de la técnica. En particular, como accionamientos de barco también se han dado a conocer bajo el concepto de rotor Flettner, y en el libro “Die Segelmaschine” de Klaus D. Wagner, Ernst Kabel Verlag GmbH, Hamburgo, 1991 se describe el equipamiento de barcos con un rotor Flettner de este tipo o rotor Magnus. Ya en este libro se describe una relación velocidad periférica / velocidad del viento (= I) como la relación de la velocidad de contorno respecto a la velocidad del viento que sopla, con cuatro indicaciones (véase “Die Segelmaschine”, en el lugar indicado, página 65, línea 3) . En esta relación velocidad periférica / velocidad del viento se consigue un coeficiente de sustentación en el orden de magnitud de diez (en el libro indicado se habla de un valor de nueve) .
En el estado de la técnica comúnmente aceptado se hace referencia a los siguientes documentos: documento DE 10 2005 028 447 A1, Libro DE: “Windschiffe” de Helmut Risch, Jochen Bertholdt, VEB Verlag Technik, Berlin 1988, pág. 62/63, documento DE 24 30 630 A1, documento US 4, 398, 895, documento DE 692 18 428 T2, documento DE 103 34 481 A1, documento DE 29 08 159 A1 y documento DE 47 861 A1.
El documento GB 2 187 154 se considera el más próximo al estado de la técnica, y muestra un rotor Magnus con un accionamiento y un control según el preámbulo de la reivindicación subordinada 1.
El documento AT 110 303 muestra un rotor Magnus con un accionamiento y un control, así como tres rodillos de guiado que están en contacto con el contorno exterior inferior del rotor Magnus.
El objetivo de la invención es aprovechar mejor el rotor Magnus en su efecto de lo que sucede en el estado de la técnica.
Esto se consigue con un rotor Magnus del tipo mencionado al comienzo gracias al hecho de que el control esté configurado para controlar el accionamiento de tal manera que se consiga una relación velocidad periférica / velocidad del viento en el intervalo de 5 a 20, estando configurado el control para derivar la relación velocidad periférica / velocidad del viento a partir de una velocidad del viento media determinada a lo largo de un intervalo de tiempo prefijado.
En este caso, la invención se basa en el reconocimiento de que la suposición de que por encima de una relación velocidad periférica / velocidad del viento de cuatro no habría ningún incremento significativo del coeficiente de sustentación, y sobre todo, relacionada con la potencia motriz que se ha de aplicar, se basa en un prejuicio técnico. Se ha podido constatar de modo empírico que un incremento de la relación velocidad periférica / velocidad del viento lleva a un coeficiente de sustentación significativamente más elevado. De modo correspondiente resulta también una mayor potencia del rotor Magnus.
Según la invención, se realiza 5 I relación velocidad periférica / velocidad del viento, I 20, y de modo especialmente preferido, no reivindicado aquí, 5 I relación velocidad periférica / velocidad del viento, I 10. En un funcionamiento del rotor Magnus en este intervalo, los coeficientes de sustentación conseguidos, por un lado, así como las energías motrices requeridas, y los esfuerzos del rotor Magnus, por otro lado, están en una relación especialmente adecuada entre ellos.
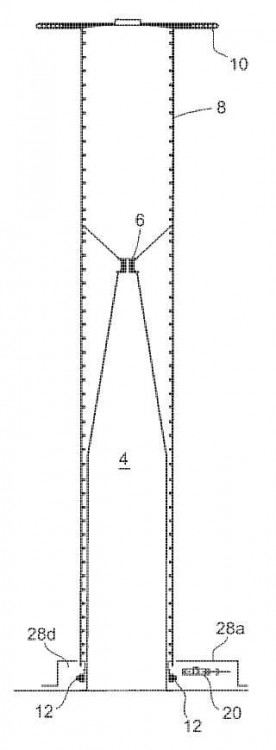
En una forma de realización preferida, en el interior del rotor Magnus está dispuesto un soporte, que porta el rotor Magnus transmitiendo un apoyo. Con ello, el rotor Magnus permanece limpio en el exterior desde el punto de vista aerodinámico, y al mismo tiempo se protege el soporte y también el apoyo de influencias meteorológicas.
Según la invención, están previstos al menos tres rodillos de guiado dispuestos en el contorno exterior inferior, que están en contacto sin holgura con el rotor Magnus. De modo especialmente preferido, se trata de rodillos de guiado distanciados de modo uniforme. Por medio de estos rodillos de guiado se garantiza que independientemente de la altura del soporte en el interior del rotor Magnus y de la altura unida a ello del apoyo, el rotor Magnus no puede realizar ningún movimiento que golpee la rotación de modo sobrepuesto. De este modo, por un lado se guía el rotor Magnus de modo uniforme, y por otro lado, el apoyo no se carga con momentos que resulten de una desviación eventual del motor. Esto, a su vez, favorece la vida útil del apoyo.
Para reducir la conformación de ruido a partir de los rodillos de guiado que giran en el rotor Magnus, o incluso para eliminarla, cada rodillo de guiado presenta en su superficie de contorno exterior un revestimiento elástico. Este revestimiento puede ser, por ejemplo, una mezcla de goma dura, un plástico, u otro material adecuado, que por su lado reduce o suprime el ruido de rodadura entre el rodillo de guiado y el rotor Magnus, y por otro lado presenta un desgaste lo menor posible.
De modo alternativo o complementario, cada rodillo de guiado está alojado de modo amortiguado respecto a oscilaciones. En este caso, la amortiguación frente a oscilaciones se puede conseguir por medio de atenuadores de goma. Como alternativa al rodillo de guiado revestido de modo elástico, el apoyo amortiguado frente a oscilaciones puede eliminar la parte de ruido principal, mientras que la eliminación de ruido óptima se consigue por medio de una combinación de un rodillo de guiado revestido elásticamente y un apoyo amortiguado frente a oscilaciones del rodillo de guiado.
Puesto que los rodillos de guiado ruedan de modo permanente sobre el contorno exterior del rotor Magnus, aparecerá en ese punto un desgaste correspondiente. Un rodillo de guiado desgastado puede ser reemplazado. Para no tener que reemplazar en algún momento un rotor Magnus desgastado por medio de los rodillos de guiado, en el contorno exterior inferior del rotor Magnus está prevista una banda de guiado sobre la que ruedan los rodillos de guiado. Esta banda de guiado se conforma preferentemente por medio de chapas de acero segmentadas, que en caso de que sea necesario pueden ser intercambiadas por segmentos. De este modo se puede mantener el guiado del rotor Magnus de un modo sencillo, y el propio rotor Magnus no está sometido a ningún desgaste por medio de los rodillos de guiado o a ningún daño por medio de cuerpos extraños entre la banda de guiado y los rodillos de guiado.
En una variante especialmente ventajosa, el rotor Magnus se acciona a través de una correa de accionamiento, que ajusta una medida prefijada en el contorno exterior inferior del rotor Magnus. La medida prefijada puede ser, de modo correspondiente a los requerimientos, por ejemplo r/2 o también 2 r/3. En este accionamiento se realiza la introducción de fuerza no sólo a través de flancos de dientes individuales de un piñón, sino a través de toda la superficie de contacto entre el rotor Magnus y la correa de accionamiento. Esto es considerablemente menos propenso a los fallos que los accionamientos convencionales, y los componentes de accionamiento individuales pueden ser reemplazados sin problemas en caso de que sea necesario. Además, el propio rotor Magnus, por ejemplo, no presenta ninguna corona dentada que pueda ser dañada y que haya de ser reparada a continuación. Para hacer que el rotor Magnus en este caso no sea susceptible al desgaste, al menos la región del contorno exterior inferior del rotor Magnus, en la que la correa de accionamiento está en contacto con el rotor Magnus, está hecha de acero.
El propio accionamiento se realiza preferentemente por medio de un guiado de la correa de accionamiento a través de tres rodillos, de los cuales está accionado al menos uno. De estos rodillos accionados se transmite entonces la fuerza a través de la correa, que se adapta al contorno exterior del rotor Magnus, al propio rotor Magnus.
Para contrarrestar variaciones en longitud de la correa de accionamiento, por ejemplo como consecuencia de influjos térmicos, y las variaciones que van con ello de la tensión de la correa de accionamiento, y para poder compensar también un alargamiento de la correa de accionamiento por medio de las fuerzas de accionamiento que actúan, está previsto de un modo especialmente preferido... [Seguir leyendo]
Reivindicaciones:
1. Rotor Magnus (8) con un accionamiento (26) para el accionamiento del rotor Magnus (8) y un control
(24) para el control del accionamiento (26) de tal manera que el rotor Magnus (8) alcanza una velocidad de contorno a la que se ajusta una relación velocidad periférica / velocidad del viento en el intervalo de 5 a 20, caracterizado porque en el contorno exterior inferior del rotor Magnus (8) están dispuestos al menos tres rodillos de guiado (12) , que están en contacto sin holgura con el rotor Magnus (8) , y porque el control (24) está equipado para derivar la relación velocidad periférica / velocidad del viento a partir de una velocidad del viento media determinada a lo largo de un intervalo de tiempo prefijado.
2. Rotor Magnus según la reivindicación 1, caracterizado por un soporte (4) que está dispuesto en el interior del rotor Magnus (8) , y soporta el rotor Magnus (8) poniendo entre medio un apoyo (6) .
3. Rotor Magnus según la reivindicación 1 ó 2, en el que al menos los tres rodillos de guiado (12) están distanciados de modo uniforme en el contorno exterior inferior del rotor Magnus (8) .
4. Rotor Magnus según la reivindicación 1, 2 ó 3, caracterizado por un revestimiento elástico en la superficie de contorno exterior de cada rodillo de guiado (12) .
5. Rotor Magnus según cualquiera de las reivindicaciones 1 a 4, caracterizado por un apoyo amortiguado frente a oscilaciones de cada rodillo de guiado (12) .
6. Rotor Magnus según cualquiera de las reivindicaciones 1 a 5, caracterizado por unos amortiguadores de goma (42) para el apoyo amortiguado frente a oscilaciones de cada rodillo de guiado (12) .
7. Rotor Magnus según cualquiera de las reivindicaciones 1 a 6, caracterizado por una banda de guiado
(13) hecha de chapas de acero segmentadas en el contorno exterior inferior del rotor Magnus (8) , en el que los rodillos de guiado (12) ruedas sobre la banda de guiado (13) .
8. Rotor Magnus según cualquiera de las reivindicaciones 1 a 7, caracterizado por una correa de accionamiento (14) que está en contacto en una medida prefijada con el contorno exterior inferior del rotor Magnus (8) .
9. Rotor Magnus según la reivindicación 8, caracterizado por un guiado de la correa de accionamiento
(14) por medio de tres rodillos (16, 18, 20) , de los cuales al menos uno está accionado.
10. Rotor Magnus según la reivindicación 9, caracterizado por un rodillo tensor (20) que se puede desplazar en una dirección radial del rotor Magnus (8) .
11. Rotor Magnus según la reivindicación 10, caracterizado por un desplazamiento por motor del rodillo tensor (20) .
12. Rotor Magnus según cualquiera de las reivindicaciones 9 a 11, caracterizado por una cubierta (28ª28h) que rodea el contorno inferior del rotor Magnus (8) al menos parcialmente, y cubre los rodillos (16, 18, 20) para el guiado de la correa de accionamiento (14) , así como la propia correa de accionamiento (14) y los rodillos de guiado (12) .
13. Rotor Magnus según la reivindicación 12, caracterizado por una segmentación de la cubierta (28a28h) correspondiente a los componentes dispuestos por debajo de ella.
14. Rotor Magnus según cualquiera de las reivindicaciones 1 a 13, caracterizado por una primera frecuencia propia por encima del mayor número de revoluciones por unidad de tiempo del rotor Magnus (8) .
15. Procedimiento para la operación de un rotor Magnus (8) con un accionamiento (26) , que pone el rotor Magnus en rotación, y un control (24) en el que el accionamiento (26) se controla de tal manera que se ajusta una relación velocidad periférica / velocidad del viento en el intervalo de 5 a 20, en el que la relación velocidad periférica / velocidad del viento se deriva a partir de una velocidad del viento media que se determina a lo largo de un intervalo temporal prefijado.
16. Procedimiento según la reivindicación 15, caracterizado porque el rotor Magnus (8) se opera con un número de revoluciones por unidad de tiempo que es menor que la primera frecuencia propia del rotor Magnus (8) .
17. Barco, con al menos un rotor Magnus según cualquiera de las reivindicaciones 1 a 14.
Patentes similares o relacionadas:
Un mecanismo de subida y bajada para un rotor Flettner, del 18 de Marzo de 2020, de Anemoi Marine Technologies Limited: Un procedimiento para bajar un miembro alargado desde una posición subida a una posición baja, comprendiendo el miembro alargado un estátor de […]
Sistemas de propulsión para naves acuáticas, del 14 de Agosto de 2019, de Norsepower OY Ltd: Sistema de propulsión para una nave acuática, en el que el sistema de propulsión incluye al menos un rotor de tipo Magnus que incluye un cuerpo […]
Barco con placa regulable en la proa, del 3 de Mayo de 2019, de Wobben Properties GmbH: Barco con al menos un rotor de navegación , en donde el barco presenta un castillo de proa , que presenta una placa ajustable en altura […]
Buque, en particular buque de carga, con un rotor Magnus, del 8 de Abril de 2019, de Wobben Properties GmbH: Buque de carga, con una pluralidad de rotores Magnus , en donde a cada uno de la pluralidad de rotores Magnus está asociado un motor eléctrico (M) […]
Rotor de efecto Magnus, del 18 de Abril de 2018, de Wobben Properties GmbH: Rotor de efecto Magnus , con un soporte con un extremo superior, en el que el soporte está dispuesto en el interior del rotor de efecto Magnus , un […]
Barco, del 24 de Enero de 2018, de Wobben Properties GmbH: Barco, con exactamente cuatro rotores de efecto Magnus , estando asignado a cada uno de los cuatro rotores de efecto Magnus un motor eléctrico (M) controlable […]
Barco, del 20 de Diciembre de 2017, de Wobben Properties GmbH: Barco, con cuatro rotores de efecto Magnus , estando asignado a cada uno de los rotores de efecto Magnus un motor (M) eléctrico controlable […]
Método de fabricación de un cuerpo de rotor de un rotor de tipo Magnus, del 8 de Febrero de 2017, de Norsepower OY Ltd: Un método de fabricación de un cuerpo de rotor de un rotor de tipo Magnus, caracterizado porque el método comprende (i) proporcionar […]