Sistema de control remoto de dispositivos con láser.
Esta invención describe un sistema implementable en un computador de propósito general.
La invención puede detectar una señal interactiva generada por un apuntador láser 2 en cualquier entorno, la cual es proyectada sobre un dispositivo 1 del entorno conectado al sistema. El punto de luz láser 9 es captado en una imagen 8 mediante una cámara 3 y es detectado a través del procesamiento de señales que se lleva a cabo en un módulo de detección 10 considerando las características específicas del ambiente en que se encuentra y las características del punto láser 9, se genera una señal de control hacia un dispositivo 1. Esta señal de control se genera de acuerdo con una asignación previa durante un ajuste inicial.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201400096.
Solicitante: UNIVERSIDAD DE EXTREMADURA.
Nacionalidad solicitante: España.
Inventor/es: FERNÁNDEZ DE VEGA,Francisco, CHÁVEZ DE LA O,Francisco, OLAGUE CABALLERO,Gustavo, CLEMENTE TORRES,Eddie Helbert, DOZAL GARCÍA,León Felipe.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06K11/00 FISICA. › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › Procedimientos y dispositivos para la lectura de un gráfico, o para transformar la configuración de parámetros mecánicos, p. ej. una fuerza o una presencia, en señales eléctricas (en combinación con el reconocimiento de caracteres o de trazos G06K 9/00).
Fragmento de la descripción:
Campo de la invención
La presente invención pertenece a los sistemas de control y de interacción a distancia con dispositivos del entorno donde la interacción se realiza mediante luz láser. Más concretamente, la invención se relaciona con aquéllos que emplean técnicas de reconocimiento visual.
Antecedentes de la invención
Son conocidos en el estado de la técnica diferentes sistemas de control remoto. En el campo de la domótica por ejemplo, existen sistemas que, a través de interfaces acopladas a los dispositivos pueden controlarlos usando para ello un mando a distancia que comunica con infrarrojos las órdenes a las interfaces asociadas a los dispositivos.
Se conocen sistemas de interacción con puntero láser pero se refieren a su aplicación sobre grandes pantallas. Existen otras tecnologías que pueden ser aplicadas, como sistemas robóticos con reconocimiento de habla o gestos. Sin embargo, cuentan con problemas tanto por el coste, como por la baja confiabilidad en los actuales algoritmos para reconocimiento de habla o gestos.
Hoy día, la necesidad de actuar a distancia sobre dispositivos surge en todo tipo de entornos, en diversos ambientes industriales (espacio exterior, exploración submarina, con radioactividad, bacteriológicamente contaminados, etc. por citar algunos), en edificios y hogares inteligentes con dispositivos fuera del alcance, o personas con movilidad física reducida que le impide una actuación normal.
Descripción de la invención
La presente invención emplea técnicas de reconocimiento visual para gobernar los dispositivos apuntados con una luz láser. Se trata de una tecnología más asequible frente a otras conocidas del estado de la técnica.
En concreto, la invención se refiere a un sistema de control remoto de dispositivos con láser que incluye:
- una cámara para captar una imagen que comprenda al menos una zona activa asociada a un dispositivo,
- un módulo de detección para procesar la imagen captada, para identificar el punto de luz láser en la zona activa y para generar una señal de control específica en función de dicha identificación,
- un módulo de interacción para recibir la señal de control y para interactuar con el dispositivo en función de dicha señal de control.
Opcionalmente, la cámara puede captar una pluralidad de imágenes secuenciales de diferentes zonas activas asociadas al dispositivo, y a su vez, el módulo de detección puede identificar iluminación láser en la zona activa de cada imagen, para generar una señal de control específica asociada a dicha zona activa.
Opcionalmente, para identificar la iluminación láser, el módulo de detección puede extraer una pluralidad de características descriptivas del punto láser.
Opcionalmente, al menos una de las características descriptivas del punto láser está asociada con:
- el color,
- la forma,
- la orientación,
- la intensidad.
Opcionalmente, el módulo de detección puede identificar un patrón en la iluminación láser de una pluralidad de imágenes secuenciales y emitir una señal de control específica en función de la comparación con al menos un patrón predefinido.
Opcionalmente, el módulo de interacción implementa el estándar domótico KNX/EIB.
Opcionalmente, la comunicación entre la cámara y los medios de procesamiento es de tipo inalámbrica.
Opcionalmente, el sistema de control remoto comprende el puntero láser configurado para emitir luz láser con longitud de onda, preferentemente en el rojo o en el verde.
Breve descripción de los dibujos
A continuación se pasa a describir de manera muy breve una serie de dibujos que ayudan a comprender mejor la invención y que se relacionan expresamente con una realización de dicha invención que se presenta como un ejemplo no limitativo de ésta.
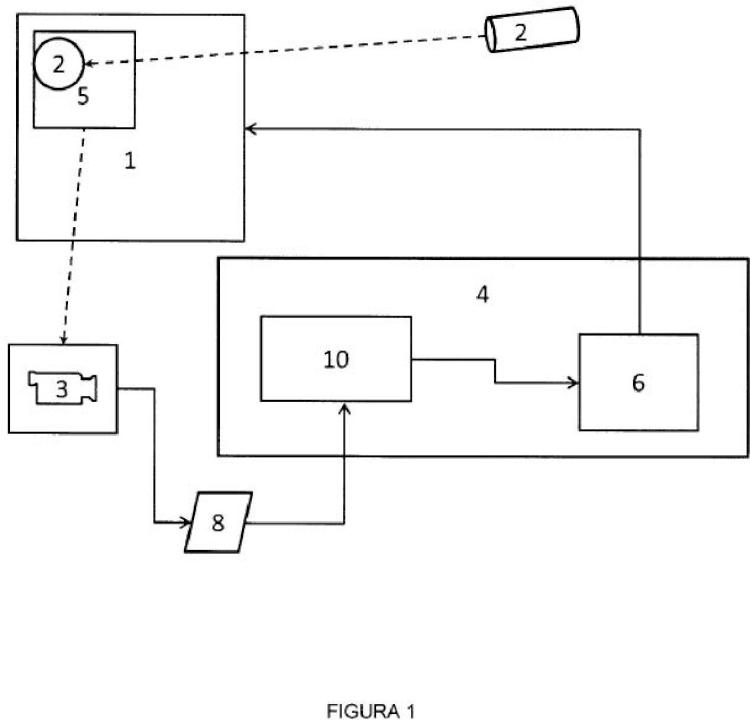
La Figura 1 muestra un diagrama de bloques funcionales según una realización de la invención.
Descripción detallada de la invención
Con referencia a la Figura 1 se ilustra adicionalmente una realización de la invención. Se puede implementar con cámaras de visión 3 de bajo coste, un computador 4 de propósito general y puntero láser o apuntador láser 2 estándar con el que se proyectar luz láser. El computador 4 puede incorporar un módulo de detección 10 para analizar las imágenes 8 tomadas por las cámaras 3. Si se detecta en la imagen 8 la proyección de la luz láser 9, el computador 4 puede actuar sobre el dispositivo 1 según se haya definido de acuerdo con el ajuste inicial del sistema. Esta actuación se lleva a cabo con un módulo de interacción 6 que hace de interfaz con el dispositivo 1. El módulo de interacción 6 emite señales de control que son órdenes para modificar el modo de operación de dicho dispositivo 1.
Para el envío de órdenes a los dispositivos 1 puede emplearse cualquier tecnología de interconexión que utilice un protocolo de envío de órdenes a dispositivos. En el ajuste inicial se incluirán las órdenes en el computador 4, para que sean enviadas de acuerdo con el protocolo elegido.
Durante el ajuste inicial del sistema, el usuario debe definir al menos una zona activa 5 asociada a cada dispositivo 1 que se va a controlar. Es también necesario asignarle a dicha zona 5 una o varias órdenes de control.
Las zonas activas 5 son aquellas zonas asociadas a los dispositivos 1 sobre los que interactuar. Durante el ajuste inicial, el sistema puede requerir al usuario que proyecte el
láser 2 sobre las zonas activas 5 un número determinado de veces. La definición de la zona activa 5 puede hacerse marcando sobre una imagen 8 captada que la contenga. Con las imágenes obtenidas en la etapa de ajuste inicial, se analizan y fijan los parámetros necesarios para el funcionamiento posterior. Por ejemplo, si se incide el puntero láser 2 sobre una primera zona activa 5, el dispositivo 1 deberá activarse.
De la misma manera, se pueden definir múltiples zonas activas 5 en cada dispositivo 1 y asociar una orden determinada a cada una. También pueden definirse patrones de movimiento del láser sobre una misma zona activa 5 para disponer de varias órdenes. En ambos casos, se puede interactuar de forma compleja con un dispositivo 1.
Posteriormente, las imágenes 8 captadas por la cámara que contengan dicha zona activa 5 pueden ser tratadas y procesadas para identificar si el punto de láser 9 está o no presente y actuar de acuerdo a cómo se haya establecido en la configuración al asignarle una orden.
Dependiendo de las características del entorno y del número de dispositivos 1, para la detección fiable del puntero láser 2 en diversas zonas activas puede ser deseable disponer de varias cámaras 3, de modo que todos los dispositivos 1 puedan ser monitorizados constantemente o al menos periódicamente según la exigencia de la aplicación para la que se destine. Unos medios de procesamiento 7 se configuran para ajustarse a las características particulares de dicho entorno, considerando condiciones de luminosidad, texturas, ángulos de proyección y tipo del láser utilizado, entre otras.
Gracias a las características de la luz de láser se puede detectar su presencia en una imagen 8 tomada por una cámara 3. Existen características distintivas asociadas al punto láser 9 como color, forma, energía y distancia que sirven para identificarlo correctamente. Adicionalmente, si se analiza una secuencia de imágenes 8 cuando se graba vídeo con la cámara 5, es factible establecer patrones de movimiento y asociarlos a órdenes de control específicas del dispositivo 5. Así el repertorio de órdenes se puede ampliar de un simple encendido/apagado en función de la presencia o no del láser a otras órdenes. Por ejemplo, se pueden definir patrones de movimiento tales como:
- Movimientos circulares en sentido horario o antihorario, para subir/bajar volumen en un televisor, subir/bajar temperatura en un sistema de calefacción/aire-acondicionado, intensidad luminosa en un sistema de luminarias, etc.
- Movimientos horizontales de izquierda a derecha para modificar el canal en un televisor,
cambiar el modo de funcionamiento en un sistema de aire-acondicionado, llegar al máximo/mínimo de intensidad en un sistema de luminarias, etc.
Una vez establecidas cada una de las zonas activas del entorno, el sistema únicamente se encargará de localizar el punto láser 9 en esa zona activa, despreciando la información del resto de la imagen 8 que captura la cámara 3 que monitoriza el entorno en cuestión. Con ello, se evitarán posibles errores en la correcta detección del punto láser 9.
Como se indica, el significado es configurable por el usuario...
Reivindicaciones:
1Sistema de control remoto de dispositivos con láser caracterizado por que comprende:
- una cámara (3) configurada para captar una imagen (8) que comprenda al menos una zona activa (5) asociada a un dispositivo (1),
- un módulo de detección (10) configurado para procesar la imagen (8) captada, para identificar el punto de luz láser (9) en la zona activa (5) y para generar una señal de control específica en función de dicha identificación,
- un módulo de interacción (6) configurado para recibir la señal de control y para interactuar con el dispositivo (1) en función de dicha señal de control.
2.- Sistema de control remoto según la reivindicación 1, caracterizado por que la cámara (3) está configurada para captar una pluralidad de imágenes (8) de diferentes zonas activas (5) asociadas al dispositivo (1), siendo dichas imágenes (8) secuenciales y a su vez, el módulo de detección (10) está configurado para identificar iluminación láser (9) en la zona activa (5) de cada imagen (8), y para generar una señal de control específica asociada a dicha zona activa (5).
3.- Sistema de control remoto según la reivindicación 1 o 2, caracterizado por que, para identificar la iluminación láser, el módulo de detección (10) está configurado para extraer una pluralidad de características descriptivas del punto láser (9).
4.- Sistema de control remoto según la reivindicación 3, caracterizado por que el módulo de detección (10) está configurado para identificar un patrón en la iluminación láser de una pluralidad de imágenes (8) secuenciales y para emitir una señal de control específica en función de la comparación con al menos un patrón predefinido.
5.- Sistema de control remoto según la reivindicación 3 o 4, caracterizado por que una de las características descriptivas del punto láser (9) está asociada al color.
6.- Sistema de control remoto según una cualquiera de las reivindicaciones 3 a 5, caracterizado por que una de las características descriptivas del punto láser (9) está asociada a la forma.
7.- Sistema de control remoto según una cualquiera de las reivindicaciones 3 a 6,
caracterizado por que una de las características descriptivas del punto láser (9) está asociada a la orientación.
8.- Sistema de control remoto según una cualquiera de las reivindicaciones 3 a 7, 5 caracterizado por que una de las características descriptivas del punto láser (9) está
asociada a su intensidad.
9.- Sistema de control remoto según una cualquiera de las reivindicaciones anteriores, caracterizado por que el módulo de interacción (6) implementa el estándar domótico
KNX/EIB.
10.- Sistema de control remoto según una cualquiera de las reivindicaciones anteriores, caracterizado por que la comunicación entre la cámara (3) y los medios de procesamiento (7) es inalámbrica.
11.- Sistema de control remoto según una cualquiera de las reivindicaciones anteriores, caracterizado por que comprende el puntero láser (2) configurado para emitir luz láser con longitud de onda en el rojo.
12.- Sistema de control remoto según una cualquiera de las reivindicaciones anteriores 1 a
10, caracterizado por que comprende el puntero láser (2) configurado para emitir luz láser con longitud de onda en el verde.
Patentes similares o relacionadas:
CONJUNTO PARA MONITORIZACIÓN DE CONSUMOS DE AGUA, del 10 de Agosto de 2017, de BNSTAR INNOVATIONS, S. L: Conjunto para monitorización de consumos de agua, que comprende una caja destinada a quedar empotrada en una pared (P) y provista de cuatro […]
 EQUIPO INTEGRAL DE DETECCIÓN, AVISO, PREDICCIÓN Y CORRECCIÓN PARA LA SEGURIDAD DE PERSONAS CON EPILEPSIA, del 17 de Noviembre de 2015, de MJN NEUROSERVEIS, S.L: 1. Equipo integral de detección, aviso, predicción y corrección para la seguridad de personas con epilepsia, caracterizado porque comprende:
- un equipo […]
EQUIPO INTEGRAL DE DETECCIÓN, AVISO, PREDICCIÓN Y CORRECCIÓN PARA LA SEGURIDAD DE PERSONAS CON EPILEPSIA, del 17 de Noviembre de 2015, de MJN NEUROSERVEIS, S.L: 1. Equipo integral de detección, aviso, predicción y corrección para la seguridad de personas con epilepsia, caracterizado porque comprende:
- un equipo […]
 ADICION A LA PAATENTE DE INVENCION 200301387 POR SUPERFICIE PRESORA LAMINADA INTELIGENTE, del 16 de Febrero de 2009, de CHASCO PEREZ DE ARENAZA,JUAN CARLOS: Superficie presora laminada inteligente: Consiste en una lámina elástica preparada para medir una determinada presión externa, con numerosos orificios que […]
ADICION A LA PAATENTE DE INVENCION 200301387 POR SUPERFICIE PRESORA LAMINADA INTELIGENTE, del 16 de Febrero de 2009, de CHASCO PEREZ DE ARENAZA,JUAN CARLOS: Superficie presora laminada inteligente: Consiste en una lámina elástica preparada para medir una determinada presión externa, con numerosos orificios que […]
METODO Y SISTEMA PARA OBTENER DATOS DE POSICION., del 1 de Mayo de 2007, de EPOS TECHNOLOGIES LIMITED: Un sistema de detección de posición para su uso en asociación con aplicaciones informáticas, comprendiendo el sistema: un elemento posicional destinado […]
DISPOSITIVO QUE PUEDE SER IMPLANTADO., del 1 de Mayo de 2006, de ENDOART S.A.: Un dispositivo que puede ser implantado que comprende: un motor paso a paso, un miembro movible, movido por el motor paso a paso; y un oscilador […]
SUPERFICIE PRESORA LAMINADA INTELIGENTE., del 16 de Febrero de 2006, de CHASCO PEREZ DE ARENAZA,JUAN CARLOS: Superficie presora laminada inteligente. Consiste en una lámina elástica preparada para medir una determinada presión externa, con numerosos orificios […]
DISPOSITIVO DE CONEXION PARA RATON SIN CLICK., del 1 de Noviembre de 2002, de GONZALEZ GARCIA,JUAN JOSE GOMEZ CAMACHO,CESAR: 1. Dispositivo de conexión para ratón sin click, caracterizado porque, esta constituido por dos piezas y , enfrentadas entre sí, y una […]
 METODO, UNIDAD DE USUARIO Y SOPORTE LEGIBLE POR ORDENADOR QUE ALMACENA INSTRUCCIONES PARA GESTIONAR LA COMUNICACION EN UN SISTEMA, del 1 de Noviembre de 2008, de ANOTO AB: Un método para gestionar la comunicación en un sistema, en que el sistema incluye al menos una unidad de usuario, cuya unidad de usuario es capaz de leer información desde […]
METODO, UNIDAD DE USUARIO Y SOPORTE LEGIBLE POR ORDENADOR QUE ALMACENA INSTRUCCIONES PARA GESTIONAR LA COMUNICACION EN UN SISTEMA, del 1 de Noviembre de 2008, de ANOTO AB: Un método para gestionar la comunicación en un sistema, en que el sistema incluye al menos una unidad de usuario, cuya unidad de usuario es capaz de leer información desde […]