Dispositivo de rastreo para realizar rastreos del suelo desde el interior de un vehículo así como vehículo provisto de tal dispositivo de rastreo.
Dispositivo de rastreo (1) para realizar rastreos del suelo desde el interior de un vehículo (4),
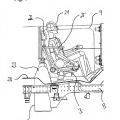
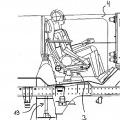
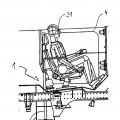
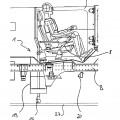
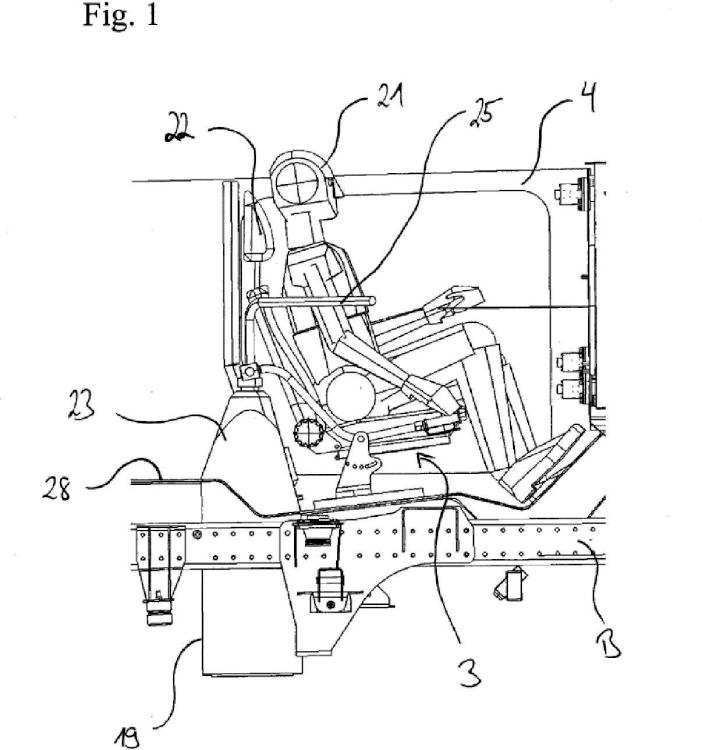
con una sonda de rastreo (2) que puede ponerse en contacto con el suelo y con un mango (3) para mover la sonda de rastreo (2) desde una posición de reposo hasta una posición bajada de rastreo del suelo,
en donde el mango (3) comprende una palanca (6, 8) y un cojinete de palanca (7) que comprende un eje de giro horizontal, y en donde la palanca (6, 8) es acoplable con el piso interior del vehículo a través del cojinete de palanca (7), caracterizado por que el mango (3) que comprende la palanca (6, 8) y el cojinete de palanca (7) está configurado en forma de balancín y la sonda de rastreo (2) está acoplada con el mango (3) configurado en forma de balancín de tal manera que, al accionar el mango (3), la sonda de rastreo (2) desciende bajo una acción de palanca hasta la posición de rastreo del suelo.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DE2010/000015.
Solicitante: KRAUSS-MAFFEI WEGMANN GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: KRAUSS-MAFFEI-STRASSE 11 80997 MUNCHEN ALEMANIA.
Inventor/es: WAGNER, HARTMUT, DR., Schneider,Lars,Dr.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F41H7/03 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F41 ARMAS. › F41H BLINDAJE; TORRETAS ACORAZADAS; VEHICULOS BLINDADOS O ARMADOS; MEDIOS DE ATAQUE O DE DEFENSA, p. ej. ENMASCARAMIENTO, EN GENERAL. › F41H 7/00 Vehículos blindados o armados (aspectos generales del vehículo B60; buques acorazados o armados B63G; aeronaves blindadas o armadas B64D; montaje de armas de fuego, p. ej. metralletas, sobre vehículos F41A 23/00). › Compartimentos a presión para la tripulación; Medios para prevenir la entrada de productos asfixiantes, p. ej. de gases de combustión provenientes de los tubos de arma, en los compartimentos de la tripulación; Disposiciones para la estanqueidad.
- G01N1/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 1/00 Muestreo; Preparación de muestras para la investigación (manipulación de materiales para un análisis automático G01N 35/00). › Dispositivos para tomar muestras.
- G01N1/08 G01N 1/00 […] › que implican una herramienta de extracción, p. ej. barrena hueca cilíndrica o trépano sacamuestras.
- G01N1/22 G01N 1/00 […] › en estado gaseoso.
- G01N1/44 G01N 1/00 […] › Tratamiento de muestras que implica una radiación, p. ej. calor.
- G01V3/15 G01 […] › G01V GEOFISICA; MEDIDA DE LA GRAVITACION; DETECCION DE MASAS U OBJETOS; MARCAS O ETIQUETAS DE IDENTIFICACION (medios para indicar dónde se encuentran personas sepultadas accidentalmente, p. ej. por la nieve A63B 29/02). › G01V 3/00 Prospección o detección eléctrica o magnética; Medida de las características del campo magnético terrestre, p. ej. de la declinación o de la desviación. › especialmente adaptada para la utilización durante el transporte, p. ej. por una persona, un vehículo o un barco.
PDF original: ES-2552917_T3.pdf
Patentes similares o relacionadas:
Sonda de prueba para un filtro, del 29 de Abril de 2020, de CAMFIL AB: Una sonda de prueba para detectar fugas de filtro, comprendiendo la sonda de prueba: - una carcasa alargada que tiene una parte de […]
Método para muestrear partículas biológicas de la corriente de un fluido, del 8 de Abril de 2020, de Particle Measuring Systems, Inc: Un método para tomar muestras de partículas biológicas de una corriente de fluido, que consta de las siguientes etapas: preparar un impactador que […]
Método para medir la concentración de alcohol en el aliento y aparato para el mismo, del 25 de Marzo de 2020, de Alco Systems Sweden AB: Método para medir la concentración de alcohol en el aliento (BrAC) de un usuario, que comprende las etapas de: - recibir un flujo de una muestra […]
Muestreador de aire microbiano, del 26 de Febrero de 2020, de VELTEK ASSOCIATES INC: Dispositivo muestreador de gas que comprende: una placa superior que presenta una superficie superior y la placa superior presenta una pluralidad de orificios […]
Dispositivo para medir volúmenes de emisión de gas, del 12 de Febrero de 2020, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Dispositivo para medir volúmenes de emisión de gas proveniente de una muestra , que comprende una celda en la que se emite el gas, un conducto de salida […]
Contenedor de toma de muestras y sistema de toma de muestras y procedimiento operativo asociado, del 8 de Enero de 2020, de Framatome GmbH: Un contenedor de toma de muestras para obtener una muestra ambiental que tiene - una cámara exterior , que está rodeada por una pared de contenedor […]
Supervisión de un tanque estanco y térmicamente aislante, del 23 de Octubre de 2019, de GAZTRANSPORT ET TECHNIGAZ: Procedimiento de supervisión de un tanque estanco y térmicamente aislante destinado a contener un gas combustible licuado a baja temperatura, en el […]
Pre-concentrador, del 22 de Octubre de 2019, de UNIVERSITY OF LOUISVILLE RESEARCH FOUNDATION, INC.: Un pre-concentrador químico para recoger y pre-concentrar al menos un analito químico de una muestra gaseosa diluida, comprendiendo el pre-concentrador […]