Procedimiento y sistema para controlar un grupo motopropulsor de un vehículo.
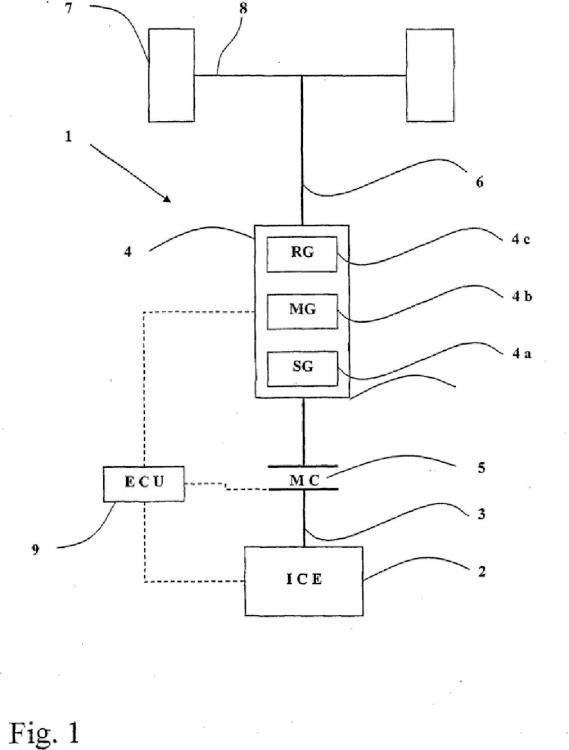
Un sistema de grupo motopropulsor para un vehículo que comprende un embrague principal automático (5),
una caja de cambios escalonada (4) y una unidad de control (9) adaptada para controlar dicho embrague principal y dicha caja de cambios escalonada, programada dicha unidad de control para generar una señal de control que indica una selección de marcha deseada, comprendiendo dicha unidad de control al menos dos conjuntos diferentes de algoritmos de control de selección de marcha para generar una señal de control de selección de marcha, comprendiendo dichos algoritmos de control límites para la velocidad de giro del motor para cuándo subir o bajar de marcha y para qué marcha seleccionar y acoplar, programados dichos algoritmos de control diferentes para generar señales de control de selección de marcha diferentes basadas en datos de entrada, conectada dicha unidad de control además a un selector de algoritmo de control de selección que indica qué conjunto de algoritmos de control de selección de marcha se va a utilizar por la unidad de control, comprendiendo dichos algoritmos de control de selección de marcha diferentes al menos un primer algoritmo de control de selección de marcha que se pretende utilizar cuando se conduce dicho vehículo en un modo normal que corresponde a las condiciones de una carretera ordinaria, y al menos un segundo algoritmo de control de selección de marcha que se pretende utilizar cuando se conduce dicho vehículo en un modo de superficie blanda, caracterizado porque dicha unidad de control se programa para registrar una resistencia de desplazamiento y un deslizamiento de rueda prevalentes, y en donde si dicha resistencia de desplazamiento es mayor que un valor predeterminado y si dicho deslizamiento de rueda es mayor que otro valor predeterminado dicha unidad de control se programa para controlar de acuerdo con dicho modo de superficie blanda.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2008/000587.
Solicitante: VOLVO LASTVAGNAR AB.
Nacionalidad solicitante: Suecia.
Dirección: 405 08 GÖTEBORG SUECIA.
Inventor/es: ERIKSSON, ANDERS, ÖBERG,NIKLAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60K28/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60K DISPOSICIONES O MONTAJE DE CONJUNTOS DE PROPULSION O DE TRANSMISIONES SOBRE VEHICULOS; DISPOSICIONES O MONTAJE DE VARIOS MOTORES PRINCIPALES DIFERENTES EN VEHÍCULOS; ACCIONAMIENTOS AUXILIARES PARA VEHICULOS; INSTRUMENTACION O TABLEROS DE A BORDO DE VEHICULOS; DISPOSICIONES DE CONJUNTOS DE PROPULSION SOBRE VEHICULOS, RELATIVAS A LA REFRIGERACION, A LA ADMISION DE AIRE, AL ESCAPE DE GASES O A LA ALIMENTACION DE CARBURANTE. › B60K 28/00 Dispositivos de seguridad para el control de la unidad de propulsión, especialmente adaptados para o dispuestos en vehículos, p. ej. que impiden el suministro de combustible o el encendido en caso de condiciones potencialmente peligrosas (para vehículos propulsados eléctricamente B60L 3/00; sistemas para control de la conducción del vehículo para fines no relacionados con el control de una subunidad particular B60W 30/00; sistemas de control d la conducción especialmente adaptados para vehículos terrestres autónomos B60W 60/00). › que responden o previenen el derrape o patinado de las ruedas (sistemas de control del frenado para la estabilidad del vehículo B60T 8/1755; dispositivos que regulan la fuerza de frenado sobre la rueda según una condición de velocidad B60T 8/32; control de la estabilidad del vehículo por otros medios distintos al control de la unidad propulsora únicamente B60W 30/02; prevención del patinado reduciendo la fuerza motriz en vehículos de raíl B61C 15/12).
- F16H61/02 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 61/00 Funciones internas de las unidades de control para cambios de velocidad o para mecanismos de inversión de las transmisiones que transmiten un movimiento rotativo. › caracterizadas por las señales utilizadas.
PDF original: ES-2509041_T3.pdf
Fragmento de la descripción:
Procedimiento y sistema para controlar un grupo motopropulsor de un vehículo CAMPO TÉCNICO
La invención se refiere a una transmisión automática manual (AMT) y al control de dicha AMT. En concreto la invención se refiere a un mapa para controlar la selección de marcha en dicha AMT.
ESTADO DE LA TÉCNICA ANTERIOR
El uso de transmisiones automáticas manuales (AMT) se ha vuelto crecientemente habitual durante los últimos años y a día de hoy es un elemento común en muchos vehículos. La inclusión de una selección automática del cambio de marcha ha hecho que la conducción sea más fácil para un conductor que en lugar de esforzarse en seleccionar la marcha adecuada puede concentrarse en la conducción y el tráfico circundante. En concreto, para vehículos pesados un sistema de cambio automático tal como una AMT es de gran valor.
Con el fin de controlar el sistema automático, se han sugerido un número de estrategias de control y mapas de patrón de cambio. En los documentos US 5.67.374 y US 4.841.815 se describe el uso de lógica difusa con el fin de seleccionar una marcha. El documento US 4.922.428 describe un sistema de aprendizaje para mejorar un patrón de selección de marcha. El documento US 27/254774 describe un sistema para seleccionar entre un modo de cambio manual y un modo de cambio automático o diferentes modos de cambio automático. Asimismo se conoce utilizar diferentes patrones de cambio de marcha dependiendo de diferentes parámetros, y esto se divulga por ejemplo en los documentos US 6.519.52; US 26/155447; US 5.911.771 o US 6.18.. El documento US 4.569.255 da a conocer un sistema y un procedimiento que tienen todas las características del preámbulo de las reivindicaciones 1 y 1.
Incluso aunque los anteriores documentos proporcionan diferentes sistemas para controlar una transmisión automática, existen aun así ciertos deseos no satisfechos en relación con este tipo de sistemas para funcionar bien a lo largo de una amplia variedad de condiciones de funcionamiento. Así pues, la presente invención tiene como objetivo adaptar un vehículo provisto de una AMT para que funcione de modo satisfactorio bajo una variedad aumentada de condiciones.
DESCRIPCIÓN DE LA INVENCIÓN
La presente invención proporciona un nuevo sistema de grupo motopropulsor para un vehículo y un procedimiento para un control mejorado de una transmisión automática manual (AMT). Así pues, la Invención se refiere a un grupo motopropulsor para un vehículo y a un sistema de acuerdo con la invención que comprende:
- un embrague principal automático,
- una caja de cambios escalonada, y
- una unidad de control adaptada para controlar dicho embrague principal y dicha caja de cambios escalonada.
La unidad de control se programa para generar una señal de control que indica una selección de marcha deseada. La unidad de control comprende al menos dos conjuntos distintos de algoritmos de control de selección de marcha para generar la señal de control de selección de marcha y los distintos algoritmos de control se programan para generar señales de control de selección de marcha distintas basadas en datos de entrada, es decir, los mismos datos de entrada harán que la señal de control de selección de marcha difiera para al menos un estado de los parámetros de entrada. La unidad de control está conectada además a un selector del algoritmo de control de selección de marcha que indica qué conjunto de algoritmos de control de selección de marcha se va a utilizar por la unidad de control. Entre los al menos dos algoritmos de control de selección de marcha distintos hay al menos un primer algoritmo de control de selección de marcha destinado a ser utilizado cuando se conduce dicho vehículo en un modo normal que corresponde a las condiciones de una carretera ordinaria, es decir, esta es la estrategia de control que se utiliza normalmente por el vehículo si no se selecciona una estrategia o programa concreto.
De acuerdo con la presente invención, los algoritmos de control de selección de marcha comprenden un segundo algoritmo de control de selección de marcha destinado a ser utilizado cuando se conduce dicho vehículo en un modo de superficie blanda. Mediante el término modo de superficie blanda se incluye, por ejemplo, cuando se conduce el vehículo en arena, por ejemplo en el desierto. Por supuesto puede haber otras condiciones similares, al menos con respecto a las propiedades o condiciones del grupo motopropulsor y las ruedas, en las que se puede utilizar igualmente este modo, por ejemplo una conducción en nieve virgen o barro húmedo. Así pues, este modo pretende incluir diferentes tipos de condiciones en las que hay una superficie blanda, por ejemplo una superficie que comprende algún tipo de material particulado o material suelto, tal que el agarre de las ruedas de tracción sea menor
del usual e, igualmente, la propiedad de rodadura sea igualmente menor a la usual debido a la propiedad inherente de un material suelto de permitir que las ruedas se hundan en la superficie y mientras que el material superficial no se mantendrá unido cuando se transmita una fuerza a la superficie, por ejemplo desde las ruedas de tracción. Así pues, existe una razón para cambiar el sistema de control o señales de control de cambio de marcha para diferentes condiciones, ya que los modos de control normales no gestionan satisfactoriamente el sistema de grupo motopropulsor en ciertas condiciones extremas. Por ejemplo, cuando un vehículo, por ejemplo un vehículo pesado provisto de una AMT, se conduce en el desierto y asciende por una colina, la resistencia de desplazamiento es muy superior a cuando asciende, por ejemplo, por una colina igualmente inclinada que tiene una superficie asfaltada. Si no se realiza ninguna adaptación debido al cambio de condición, el vehículo utilizará una marcha demasiado alta y no podrá ascender la colina como se desea. Cuando se baja de marcha, es muy probable que las ruedas comiencen a deslizar, al menos durante un periodo corto, ya que la arena suelta permite fácilmente un giro y como resultado de esto la caja de cambios puede cambiar de nuevo a la marcha superior no deseada. Este escenario puede ocurrir varias veces y el vehículo no se desplazará esencialmente hacia delante y, si la colina es lo suficientemente empinada, probablemente se parará completamente. Así pues, existe una necesidad de otro modo de estrategia de cambio adaptado a estas condiciones con el fin de permitir que un vehículo provisto de una AMT se desplace de modo seguro y suave en una variedad de entornos aumentada.
En un modo de realización de la invención, el segundo algoritmo de control de selección de marcha se programa para realizar un cambio a una marcha superior seleccionada a una velocidad del motor mayor que cuando se utiliza el algoritmo de control de selección de marcha de modo normal. Si por ejemplo se predice y se realiza normalmente un cambio de marcha a 16 rpm, el nivel para el cambio se puede elevar a 19 rpm
De acuerdo con aún otro modo de realización, que se puede utilizar solo o en combinación con el modo de realización anterior, el cambio de marcha puede incluir escalones más pequeños. Si, por ejemplo, en una caja de cambios equipada con 12 marchas hacia delante las marchas se cambian escalonadamente utilizando las etapas de marcha 2-5-8-1-11-12 de acuerdo con un modo de cambio de marcha normal cuando se cambia de la etapa de marcha 2 a la 12, las etapas de marcha utilizadas cuando se conduce en el modo de superficie blanda pueden ser, por ejemplo, 2-4-6-8-9-1-11-12 cuando se utiliza el modo de superficie blanda. Así pues, se incluyen más cambios de marcha en el patrón de cambio de marcha de superficie blanda cuando se cambia de la marcha más baja posible a la marcha más alta posible en comparación con el patrón de cambio de marcha normal y cuando en ambos de dichos patrones de cambio de marcha la marcha más baja y la marcha más alta son la misma. En el ejemplo anterior, se utilizan dos cambios de marcha adicionales en el modo de superficie blanda en comparación con el modo normal cuando se cambia de la 2a a la 12a marcha.
A primera vista, el patrón de cambio sugerido puede parecer que es similar a los patrones de cambio para un modo de conducción deportiva o similar para un vehículo. Sin embargo, hay algunas diferencias básicas entre el modo de superficie blanda y tal modo de conducción deportiva. En el modo de superficie blanda el patrón de cambio está optimizado para poder proporcionar una fuerza motriz lo suficientemente alta con el fin de evitar que el vehículo se pare o sea necesario cambiar de nuevo a una marcha inferior. En el modo de conducción deportiva, el vehículo está optimizado para cambiar marchas de modo que se proporcione... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de grupo motopropulsor para un vehículo que comprende un embrague principal automático (5), una caja de cambios escalonada (4) y una unidad de control (9) adaptada para controlar dicho embrague principal y dicha caja de cambios escalonada, programada dicha unidad de control para generar una señal de control que indica una selección de marcha deseada, comprendiendo dicha unidad de control al menos dos conjuntos diferentes de algoritmos de control de selección de marcha para generar una señal de control de selección de marcha, comprendiendo dichos algoritmos de control límites para la velocidad de giro del motor para cuándo subir o bajar de marcha y para qué marcha seleccionar y acoplar, programados dichos algoritmos de control diferentes para generar señales de control de selección de marcha diferentes basadas en datos de entrada, conectada dicha unidad de control además a un selector de algoritmo de control de selección que indica qué conjunto de algoritmos de control de selección de marcha se va a utilizar por la unidad de control, comprendiendo dichos algoritmos de control de selección de marcha diferentes al menos un primer algoritmo de control de selección de marcha que se pretende utilizar cuando se conduce dicho vehículo en un modo normal que corresponde a las condiciones de una carretera ordinaria, y al menos un segundo algoritmo de control de selección de marcha que se pretende utilizar cuando se conduce dicho vehículo en un modo de superficie blanda, caracterizado porque dicha unidad de control se programa para registrar una resistencia de desplazamiento y un deslizamiento de rueda prevalentes, y en donde si dicha resistencia de desplazamiento es mayor que un valor predeterminado y si dicho deslizamiento de rueda es mayor que otro valor predeterminado dicha unidad de control se programa para controlar de acuerdo con dicho modo de superficie blanda.
2. Un sistema de grupo motopropulsor de acuerdo con la reivindicación 1, caracterizado porque dicho algoritmo de control de selección de marcha se programa para realizar un cambio a una marcha superior seleccionada a una velocidad del motor superior a la de cuando se utiliza el algoritmo de control de selección de marcha del modo normal.
3. Un sistema de grupo motopropulsor de acuerdo con la reivindicación 1 o 2, caracterizado porque dicho segundo algoritmo de control de selección de marcha se programa para realizar etapas de cambio de marcha menores al subir de marcha en comparación con cuando se utiliza una estrategia de cambio de marcha normal.
4. Un sistema de grupo motopropulsor de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado porque dicho segundo algoritmo de control de selección de marcha depende del ángulo de giro del volante de tal modo que hay un límite aumentado de velocidad del motor para cambiar de marcha cuando hay un ángulo de giro
del volante aumentado.
5. Un sistema de grupo motopropulsor de acuerdo con la reivindicación 4, caracterizado porque no se autoriza subir de marcha cuando el ángulo de giro del volante se encuentra por encima de un límite predefinido.
6. Un sistema de grupo motopropulsor de acuerdo con cualquiera de las reivindicaciones 1 a 5, caracterizado porque se estima o se calcula un valor de la resistencia de desplazamiento a partir de datos recogidos por sensores relevantes de tal modo que un sistema de control en el vehículo predice que cuando la resistencia de desplazamiento está por encima de un cierto nivel durante un cierto período de tiempo, el grupo motopropulsor se controlará mediante el segundo algoritmo de control de selección de marcha, es decir, el modo de superficie blanda, y en otro caso se controlará mediante otro algoritmo de control de selección de marcha, por ejemplo, un modo normal.
7. Un sistema de grupo motopropulsor de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado porque dicha unidad de control comprende una tabla de referencia o una fórmula matemática.
8. Un sistema de grupo motopropulsor de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado porque se realiza una rampa más rápida del par de giro durante un cambio de marcha cuando el grupo motopropulsor se controla mediante el segundo algoritmo de control de selección de marcha que cuando se controla mediante el primer algoritmo de control de selección de marcha.
9. Un vehículo que comprende un sistema de grupo motopropulsor de acuerdo con cualquiera de las reivindicaciones 1 a 8.
1. Un procedimiento para controlar un grupo motopropulsor para un vehículo, en el que dicho grupo motopropulsor comprende algoritmos de control para generar una señal de control de selección de marcha, y en el que dicho algoritmo de control comprende límites para la velocidad de giro del motor para cuándo subir o bajar de marcha y para qué marcha seleccionar y acoplar, caracterizado el procedimiento por las etapas de:
- registrar un estado de carretera, registrando una resistencia de desplazamiento y un deslizamiento de rueda prevalentes;
- si dicho estado de carretera registrado se corresponde a un estado de carretera normal entonces se utiliza un primer algoritmo de control de selección de marcha destinado a accionar dicho vehículo en un modo normal que corresponde al estado de una carretera ordinaria;
- si dicho estado de carretera registrado se corresponde a un estado de carretera de superficie blanda, en el que dicha resistencia de desplazamiento es mayor que un valor predeterminado y el deslizamiento de rueda es mayor que otro valor predeterminado, entonces se utiliza un segundo algoritmo de control de selección de marcha destinado a accionar dicho vehículo en un modo de superficie blanda que corresponde al estado de una carretera de superficie blanda.
11. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque dicho segundo algoritmo de control de selección de marcha se programa para realizar un cambio a una marcha superior seleccionada a una velocidad de motor mayor que cuando se utiliza dicho primer algoritmo de control de selección de marcha.
12. Procedimiento de acuerdo con una de las reivindicaciones 1 y 11, caracterizado porque dicho segundo algoritmo de control de selección de marcha se programa para realizar pasos de cambio de marcha menores cuando se sube de marcha en comparación a cuando se utiliza la estrategia de cambio de marcha normal.
13. Procedimiento de acuerdo con una de las reivindicaciones 1 a 12, caracterizado porque dicho segundo algoritmo de control de selección de marcha depende del ángulo de giro del volante de tal modo que hay un límite de velocidad del motor aumentado para cambiar de marcha cuando hay un ángulo de giro aumentado del volante.
14. Procedimiento de acuerdo con la reivindicación 13, caracterizado porque no se autoriza una subida de marcha cuando el ángulo de giro del volante está por encima de un límite predefinido.
15. Procedimiento de acuerdo con una de las reivindicaciones 1 a 14, caracterizado porque se realiza una rampa de par de giro más rápida durante un cambio de marcha cuando el grupo motopropulsor se controla mediante el segundo algoritmo de control de selección de marcha que cuando se controla mediante el primer algoritmo de control de selección de marcha.
Patentes similares o relacionadas:
Dispositivo de control de cambio de marcha automático de vehículo, del 22 de Mayo de 2019, de HONDA MOTOR CO., LTD.: Un dispositivo de control de cambio de marcha automático de un vehículo que comprende: una parte de control para ejecutar una operación […]
Unidad de control, vehículo equipado con unidad de control, programa de control y método de control, del 16 de Agosto de 2017, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: El conmutador de cambio 19f es un interruptor que es pulsado por el motorista, y envía una orden de cambio de engranaje (señal que corresponde […]
Medición de esfuerzo sobre el pedal de una bicicleta o similar, del 7 de Diciembre de 2016, de LOPEZ-ARAQUISTAIN BERICOCHEA, ALFREDO: 1. Regulador de esfuerzo sobre el pedal de una bicicleta o similar, consistente en un dispositivo instalado en una bicicleta o vehículo similar, […]
Transmisión, del 22 de Junio de 2016, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Una transmisión incluyendo: al menos un accionador de embrague configurado para desenganchar al menos un embrague de un mecanismo de transmisión […]
Vehículo del tipo de montar a horcajadas incluyendo una transmisión con modo automático y manual, del 18 de Mayo de 2016, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo del tipo de montar a horcajadas incluyendo: una transmisión ; un accionador configurado para accionar la transmisión […]
Un procedimiento para la selección de las velocidades durante la conducción de un vehículo en una condición de conducción en pendiente pronunciada, del 2 de Abril de 2014, de VOLVO LASTVAGNAR AB: Un procedimiento para la selección de velocidades durante la conducción de un vehículo en una condición de conducción en pendiente pronunciada, dicho vehículo comprendiendo […]
 Procedimiento para el accionamiento de una transmisión automática o semiautomática manual de un vehículo pesado, en modalidad de marcha en vacío, del 26 de Marzo de 2013, de VOLVO LASTVAGNAR AB: Procedimiento para el accionamiento de una transmisión manual, automática o semiautomática de unvehículo pesado, en modalidad de velocidad en vacío, cuyo procedimiento comprende:
suministrar […]
Procedimiento para el accionamiento de una transmisión automática o semiautomática manual de un vehículo pesado, en modalidad de marcha en vacío, del 26 de Marzo de 2013, de VOLVO LASTVAGNAR AB: Procedimiento para el accionamiento de una transmisión manual, automática o semiautomática de unvehículo pesado, en modalidad de velocidad en vacío, cuyo procedimiento comprende:
suministrar […]
ACTUADOR PARA SISTEMA DE TRANSMISIÓN AUTOMÁTICA CONTROLADO ELECTRÓNICAMENTE, del 7 de Diciembre de 2011, de DURA GLOBAL TECHNOLOGIES, INC.: Un sistema de transmisión automática que comprende, en combinación: una transmisión automática que tiene un retén que gira para realizar un cambio entre engranajes […]