Procedimiento para determinar la longitud de un trayecto recorrido por un vehículo.
Procedimiento para determinar la longitud (1) de un trayecto recorrido por un vehículo (2) en una red de carreteras (1),
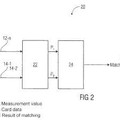
que está modelizada en forma de un mapa de carreteras digital (1') a partir de un gráfico de red de segmentos de carretera (sk) de 5 longitudes de segmento (lk) conocidas en cada caso, utilizando una unidad de a bordo (3) que lleva consigo el vehículo (2), que produce una secuencia (F) de valores de medición (pi) de su propia posición y para cada valor de medición de la posición (pi) de la secuencia (F) una medida de calidad de la posición correspondiente (qi), comprendiendo:
extracción de un conjunto (Sn) de valores de medición de la posición (pi) consecutivos de la secuencia (F), no teniendo en cuenta aquellos valores de medición de la posición (pi), cuya medida de calidad de la posición (qi) queda por debajo de un primer valor umbral (σ1) predeterminado, caracterizado por los pasos de procedimiento: determinación de una medida de calidad de conjunto (Qn) mediante la cantidad (A) de los valores de medición de la posición (pi) del conjunto (Sn) o mediante sus medidas de calidad de la posición (qi) y cuando la medida de calidad del conjunto (Qn) supera un segundo valor umbral (σ2) predeterminado: determinación de la longitud del trayecto (1) a partir de las distancias mutuas (ai) de valores de medición de la posición (pi) consecutivos del conjunto (Sn),
en otro caso: determinación de la longitud del trayecto (1) utilizando el mapa de carreteras digital (1') por asociación de los valores de medición de la posición (pi) del conjunto (Sn) a al menos un segmento de carretera (sk) y determinación de la longitud del trayecto (1) a partir de la longitud del segmento (lk) de este al menos un segmento de carretera (sk).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12180295.
Solicitante: KAPSCH TRAFFICCOM AG.
Nacionalidad solicitante: Austria.
Dirección: Am Europlatz 2 1120 Wien AUSTRIA.
Inventor/es: Tijink,Jasja, WEIMANN,FRANZ, SCHRÖDL,SÖREN, SCHEIDER,THOMAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C21/30 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › Comparación de planos o mapas topográficos.
- G01C22/00 G01C […] › Medida de la distancia recorrida sobre el suelo por vehículos, personas, animales u otros cuerpos sólidos en movimiento, p. ej. utilizando odómetros o usando podómetros.
PDF original: ES-2525867_T3.pdf
Fragmento de la descripción:
Procedimiento para determinar la longitud de un trayecto recorrido por un vehículo La presente invención se refiere a un procedimiento para determinar la longitud de un trayecto recorrido por un vehículo utilizando una Onboard-Unit (unidad de a bordo) que lleva consigo el vehículo, que produce una secuencia de valores de medición de su propia posición.
Las Onboard-Units (OBUs por sus siglas en inglés) se utilizan particularmente en sistemas de peaje de carreteras, para poder determinar los trayectos recorridos por un vehículo que lleva consigo la OBU, y a continuación poder cobrar el peaje. Para ello, una OBU se localiza por ejemplo en un sistema de navegación por satélite (global navigation satellite system (GNSS por sus siglas en inglés) ) o en una red de comunicaciones móviles terrestre con varios transceptores fijos mismos y produce de esta manera una secuencia de valores de medición de la posición ("position fixes" (posiciones fijas) ) . Cada uno de los valores de medición de la posición producidos está sujeto a inexactitudes de medición, por lo que la secuencia producida requiere una corrección posterior.
Para la corrección posterior se conoce la comparación de los valores de medición de la posición producidos con un mapa de carreteras digital que modeliza la red de carreteras ("map-matching" (comparación de mapas) ) . En este caso se determinan como recorridos los segmentos de carretera correspondientemente más cercanos. Dependiendo del tipo de construcción, la OBU envía para ello, bien los valores de medición de la posición a una central del sistema de peaje de carreteras, donde se lleva a cabo el map-matching ("thin-client-OBU" (OBU de cliente ligero) ) , o el mapa de carreteras digital está almacenado en la OBU misma, donde también se lleva a cabo el map-matching ("thick-client-OBU" (OBU de cliente pesado) ) .
Los procesos de map-matching tienen no obstante la desventaja, de que la exactitud de la determinación de la longitud del trayecto está limitada por la resolución de los segmentos del mapa de carreteras digital. Las longitudes de los trayectos recorridos realmente por un vehículo, se diferencian a menudo de las longitudes de los segmentos de carretera modelizados digitalmente. De esta manera, por ejemplo en la zona de las curvas, cruces o rotondas, el trayecto recorrido realmente es dependiente de la dirección de circulación del vehículo, mientras que las longitudes de los segmentos del mapa de carreteras digital están modelizadas habitualmente con independencia de ello.
Por otro lado también sería problemático determinar las longitudes de los trayectos basándose en los valores de medición de la posición, dado que las frecuentes inexactitudes de los valores de medición de la posición irían en contra de una determinación de la longitud del trayecto fiable y robusta.
Del documento EP1736932 y del documento US2010/0106405 se conocen procedimientos para la determinación de la longitud de un trayecto recorrido por un vehículo, donde no se tienen en cuenta valores de medición de la posición cuya medida de calidad de la posición queda por debajo de un valor umbral predeterminado.
La invención tiene como objetivo proporcionar un procedimiento para determinar la longitud de un trayecto recorrido por un vehículo, que presente una exactitud mayor que los sistemas conocidos hasta ahora con la misma robustez frente a inexactitudes de mediciones de la posición.
Este objetivo se logra con un procedimiento del tipo nombrado, utilizando una unidad de a bordo, que produce una 45 secuencia de valores de medición de su propia posición y para cada valor de medición de la posición de la secuencia, una medida de calidad de la posición correspondiente, comprendiendo:
extracción de un conjunto de valores de medición de la posición consecutivos de la secuencia, sin tener en cuenta aquellos valores de medición de la posición cuya medida de calidad de la posición queda por debajo de un primer valor umbral predeterminado, determinación de una medida de calidad del conjunto mediante la cantidad de los valores de medición de la posición del conjunto o mediante sus medidas de calidad de la posición, y cuando la medida de calidad del conjunto supera un segundo valor umbral predeterminado: determinación de la longitud del trayecto a partir de las distancias mutuas de los valores de medición de la posición consecutivos del 55 conjunto, de no ser así: determinación de la longitud del trayecto utilizando un mapa de carreteras digital, que se compone de segmentos de carretera de longitud de segmento correspondientemente conocida, asociando los valores de medición de la posición del conjunto a al menos un segmento de carretera y determinación de la longitud del trayecto a partir de la longitud del segmento de este al menos un segmento de carretera.
El procedimiento de la invención se basa en una comparación de calidad de dos pasos. En un primer paso se adquieren valores de medición de la posición de una alta calidad de posición en un conjunto y se descartan en este caso valores de medición de la posición "malos"; a continuación, en un segundo paso se evalúa la calidad del conjunto completo: en caso de que ésta sea alta, se produce la determinación de la longitud del trayecto directamente basándose en los valores de medición de la posición reales "buenos" del conjunto, y es de esta 65 manera lo más precisa posible. En caso de que la calidad del conjunto no sea suficiente, se determina un segmento de carretera para este conjunto mediante map-matching, y se utiliza para precisar la longitud del trayecto. Cuando se
lleva a cabo el procedimiento de manera repetida para conjuntos consecutivos de valores de medición de la posición, entonces resulta para una longitud total del trayecto recorrido sumada a partir de varios conjuntos o segmentos, una exactitud particularmente alta debido a la utilización directa de los valores de medición de la posición "buenos" con una robustez del procedimiento aumentada al mismo tiempo frente a valores de medición de la posición "malos" en segmentos de carretera individuales debido al procedimiento de map-matching que allí se utiliza.
En una forma de realización ventajosa de la invención se determina la medida de calidad del conjunto a partir de medidas de calidad de la posición del conjunto como media de las mismas. De esta manera la medida de calidad de la posición de cada uno de los valores de medición de la posición que se han tenido en cuenta en el conjunto, tienen cabida en la medida de calidad del conjunto. La decisión sobre si los valores de medición de la posición han de utilizarse para la determinación de la longitud del trayecto, o si ha de utilizarse el procedimiento de map-matching más robusto, se toma de esta manera precisamente mediante las medidas de calidad de la posición relevantes de los valores de medición de la posición tenidos en cuenta.
Alternativamente a ello, puede determinarse la medida de calidad del conjunto como relación de las cantidades de los valores de medición de la posición tenidos en cuenta en el conjunto con respecto a la suma de valores de medición de la posición tenidos en cuenta más no tenidos en cuenta. De esta manera también se tienen en cuenta indirectamente inexactitudes de medición de los valores de medición de la posición que no se tienen en cuenta y de esta manera forman una base de decisión mayor. Además de ello, la medida de calidad del conjunto se determina mediante una comparación sencilla de este tipo de las cantidades, de manera eficiente en recursos y rápida.
En caso de desearse, los valores de medición de la posición pueden producirse mediante un receptor de comunicaciones móviles de la unidad de a bordo por localización en una red de comunicaciones móviles terrestre.
Es especialmente ventajoso, cuando los valores de medición de la posición se producen mediante un receptor de navegación por satélite de la unidad de a bordo por localización en un sistema de navegación por satélite (global navigation satellite system (GNSS por sus siglas en inglés) ) .
La determinación de la medida de calidad de la posición es posible en diferentes variantes, que también pueden combinarse entre sí o utilizarse unas tras otras. Una primera forma de realización, que es especialmente adecuada para OBUs basadas en GNSS, consiste en que el receptor de navegación por satélite emite para cada valor de medición de la posición un valor DOP correspondiente ("dilution of precision" (valor de dilución de precisión -DOP por sus siglas en inglés) ) , preferiblemente un valor HDOP ("horizontal dilution of precision" (valor de dilución de precisión horizontal -HDOP por sus siglas en inglés) ) , como base para... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para determinar la longitud (1) de un trayecto recorrido por un vehículo (2) en una red de carreteras (1) , que está modelizada en forma de un mapa de carreteras digital (1') a partir de un gráfico de red de segmentos de carretera (sk) de longitudes de segmento (lk) conocidas en cada caso, utilizando una unidad de a bordo (3) que lleva consigo el vehículo (2) , que produce una secuencia (F) de valores de medición (pi) de su propia posición y para cada valor de medición de la posición (pi) de la secuencia (F) una medida de calidad de la posición correspondiente (qi) , comprendiendo:
extracción de un conjunto (Sn) de valores de medición de la posición (pi) consecutivos de la secuencia (F) , no teniendo en cuenta aquellos valores de medición de la posición (pi) , cuya medida de calidad de la posición (qi) queda por debajo de un primer valor umbral (Ï1) predeterminado, caracterizado por los pasos de procedimiento:
determinación de una medida de calidad de conjunto (Qn) mediante la cantidad (A) de los valores de medición de la posición (pi) del conjunto (Sn) o mediante sus medidas de calidad de la posición (qi) y cuando la medida de calidad del conjunto (Qn) supera un segundo valor umbral (Ï2) predeterminado: determinación de la longitud del trayecto (1) a partir de las distancias mutuas (ai) de valores de medición de la posición (pi) consecutivos del conjunto (Sn) , en otro caso: determinación de la longitud del trayecto (1) utilizando el mapa de carreteras digital (1') por asociación de los valores de medición de la posición (pi) del conjunto (Sn) a al menos un segmento de carretera (sk) y determinación de la longitud del trayecto (1) a partir de la longitud del segmento (lk) de este al menos un segmento de carretera (sk) .
2. Procedimiento según la reivindicación 1, caracterizado por que la medida de calidad del conjunto (Qn) se determina a partir de las medidas de calidad de la posición (qi) del conjunto (Sn) como media de las mismas.
3. Procedimiento según la reivindicación 1, caracterizado por que la medida de calidad del conjunto (Qn) se determina como relación de las cantidades (A) de valores de medición de la posición (pi) tenidos en cuenta en el conjunto (Sn) con respecto a la suma de valores de medición de la posición (pi) tenidos en cuenta más no tenidos en cuenta.
4. Procedimiento según una de las reivindicaciones 1 a 3, caracterizado por que los valores de medición de la
posición (pi) se producen mediante un receptor de comunicaciones móviles (9) de la unidad de a bordo (3) por 35 localización en una red de comunicaciones móviles terrestre (10) .
5. Procedimiento según una de las reivindicaciones 1 a 3, caracterizado por que los valores de medición de la posición (pi) se producen mediante un receptor de navegación por satélite (6) de la unidad de a bordo (3) por localización en un sistema de navegación por satélite (8) .
6. Procedimiento según la reivindicación 5, caracterizado por que el receptor de navegación por satélite (6) emite para cada valor de medición de la posición (pi) un valor DOP correspondiente, preferiblemente un valor HDOP, como base para su medida de calidad de la posición (qi) .
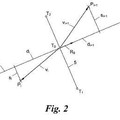
7. Procedimiento según una de las reivindicaciones 1 a 6, caracterizado por que la medida de calidad de la posición (qm) de un valor de medición de la posición (pm) se produce dependiendo de su distancia (Îm) a un segmento de carretera (sk) próximo del mapa de carreteras digital (1') .
8. Procedimiento según una de las reivindicaciones 1 a 7, caracterizado por que la medida de calidad de la posición (qk) de un valor de medición de la posición (pk) se produce dependiendo de su distancia (Îk) a un valor previsto (ek) , que se forma para el valor de medición de la posición (pk) nombrado mediante interpolación a partir de valores de medición de la posición vecinos de la secuencia (F) .
9. Procedimiento según una de las reivindicaciones 1 a 7, caracterizado por que la medida de calidad de la
posición (qj, ql) de un valor de medición de la posición (pj, pl) se produce dependiendo de su distancia (Îj, Îl) a un valor previsto (ej, el) , que se forma para el valor de medición de la posición (pj, pl) nombrado mediante extrapolación a partir de valores de medición de la posición anteriores de la secuencia (F) .
10. Procedimiento según la reivindicación 9 en conexión con la reivindicación 5, caracterizado por que el receptor de navegación por satélite (9) emite para cada valor de medición de la posición (pj) un correspondiente vector de movimiento (vj) , el cual se utiliza para la extrapolación del valor previsto (ej) .
11. Procedimiento según la reivindicación 9, caracterizado por que la unidad de a bordo (3) recibe para cada valor
de medición de la posición (pj) un valor de medición de movimiento (mj) de un sensor del vehículo, que se utiliza 65 para la extrapolación del valor previsto (ej) .
12. Procedimiento según una de las reivindicaciones 1 a 11, caracterizado por que conjuntos (Sn) consecutivos de valores de medición de la posición (pi) se extraen sin solaparse de la secuencia (F) de valores de medición de la posición (pi) .
13. Procedimiento según una de las reivindicaciones 1 a 12, caracterizado por que las distancias mutuas (ai) se determinan a partir de los valores de medición de la posición (pi) mismos.
14. Procedimiento según una de las reivindicaciones 1 a 12, caracterizado por que la unidad de a bordo (3) produce para cada valor de medición de la posición (pi) un par (gi, ti) correspondiente de velocidad (gi) y momento de medición (ti) , y por que las distancias mutuas (ai) de respectivamente dos valores de medición de la posición (pi) consecutivos se determinan a partir de la velocidad (gi) en el primero de los dos valores de medición de la posición (pi) y de la diferencia de los momentos de medición (ti, ti+1) de los dos valores de medición de la posición (pi, pi+1) .
Patentes similares o relacionadas:
 Procedimiento para mejorar la precisión de un sistema de navegación en base a radio, del 25 de Marzo de 2020, de SAAB AB: Un procedimiento para mejorar la precisión de un sistema de navegación en base a radio para corregir una posición dada por dicho sistema […]
Procedimiento para mejorar la precisión de un sistema de navegación en base a radio, del 25 de Marzo de 2020, de SAAB AB: Un procedimiento para mejorar la precisión de un sistema de navegación en base a radio para corregir una posición dada por dicho sistema […]
Detección de zona en un sistema de GNSS, del 7 de Diciembre de 2018, de Q-Free ASA: Método para detección basada en zona de vehículos que pasan dentro y fuera de una zona geográfica usando polígonos para definir el borde de dicha zona, en el […]
Método de actualización de datos de mapa, del 4 de Octubre de 2017, de ROBERT BOSCH GMBH: Un método de actualización de datos de mapa que comprende: recuperar (S400) a partir de un centro de información unos datos de mapa de actualización de todas las […]
 Sistema de mezclado de razón variable de múltiples productos agrícolas para el suministro a través de una abridora con orificios, del 23 de Marzo de 2016, de Clean Seed Agricultural Technologies Ltd: Sistema de mezclado de razón variable de múltiples productos agrícolas para el suministro desde un aplicador al terreno a través de una abridora con múltiples […]
Sistema de mezclado de razón variable de múltiples productos agrícolas para el suministro a través de una abridora con orificios, del 23 de Marzo de 2016, de Clean Seed Agricultural Technologies Ltd: Sistema de mezclado de razón variable de múltiples productos agrícolas para el suministro desde un aplicador al terreno a través de una abridora con múltiples […]
 Dispositivo y procedimiento de asignación de un valor de medida real de una posición geográfica a un objeto de mapa, del 28 de Agosto de 2013, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Dispositivo para corregir datos de referencia memorizados en una base de datos de referencia que presentancoordenadas medidas de una posición de […]
Dispositivo y procedimiento de asignación de un valor de medida real de una posición geográfica a un objeto de mapa, del 28 de Agosto de 2013, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Dispositivo para corregir datos de referencia memorizados en una base de datos de referencia que presentancoordenadas medidas de una posición de […]
 Procedimiento para detectar un paso de frontera, del 15 de Julio de 2013, de KAPSCH TRAFFICCOM AG: Procedimiento para detectar un paso de frontera de un objeto , cuyo movimiento se representamediante una secuencia de posiciones (Pi) en un mapa de carreteras […]
Procedimiento para detectar un paso de frontera, del 15 de Julio de 2013, de KAPSCH TRAFFICCOM AG: Procedimiento para detectar un paso de frontera de un objeto , cuyo movimiento se representamediante una secuencia de posiciones (Pi) en un mapa de carreteras […]
Método de transmitir información de posición de mapa digital y aparato utilizado para el método, del 4 de Julio de 2013, de PANASONIC CORPORATION: Un sistema incluyendo un aparato transmisor y un aparato receptor, almacenando el aparato transmisor un primermapa digital incluyendo una primera sección de carretera […]
MÉTODO Y APARATO PARA TRANSMITIR INFORMACIÓN DE POSICIÓN EN UN MAPA DIGITAL, del 17 de Febrero de 2012, de PANASONIC CORPORATION: Un sistema para identificar una segunda posición de evento en un segundo mapa digital que corresponde a una primera posición de evento en un primer mapa digital, […]