Plataforma robótica móvil para la realización de misiones en entornos peligrosos.
Plataforma robótica móvil para la realización de misiones en entornos peligrosos.
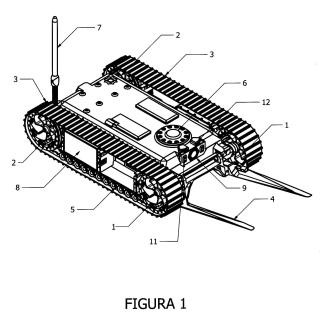
Consiste en una plataforma robótica móvil dotada de un sistema de tracción mediante dos orugas laterales (3), cada una de las cuales contiene en su interior una polea delantera (1), una polea trasera (2) conectada a un motor eléctrico, y un tren de rodadura (5) formado por una serie de rodillos adyacentes conectados a la estructura de la plataforma mediante piezas flexibles independientes que permiten a cada rodillo adaptarse a las irregularidades del terreno sin que la oruga pierda contacto con el suelo. Las poleas disponen de un sistema combinado de tracción y guiado de las orugas, de forma que minimizan la superficie de contacto entre oruga y polea, permitiendo la presencia de ranuras de evacuación de suciedad y materiales extraños en la superficie cilíndrica exterior de la sección central de la polea. Asimismo, la plataforma robótica posee dos palas frontales (4) que giran en torno al eje de rotación de las poleas delanteras, permitiendo la carga y transporte de objetos y quedando, cuando están en posición replegada, completamente contenidas en el interior del volumen delimitado por las superficies exteriores de la estructura central de la plataforma robótica.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201200732.
Solicitante: ROBOMOTION S.L.
Nacionalidad solicitante: España.
Inventor/es: GALBALLY HERRERO,David, ALEJANDRE GÓMEZ,Ángel.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J5/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad; manipuladores de control programado B25J 9/00).
- B62D55/12 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 55/00 Vehículos de orugas (bajo el aspecto de la dirección B62D 11/00). › Disposición, emplazamiento o adaptación de coronas dentadas para el enganche de eslabones de cadena.
- B62D55/125 B62D 55/00 […] › Accionamientos de extremos.
Fragmento de la descripción:
PLATAFORMA ROBÓTICA MÓVIL PARA LA REALIZACiÓN DE
MISIONES EN ENTORNOS PELIGROSOSSECTOR DE LA TÉCNICA
La presente invención se refiere a una plataforma robótica móvil autopropulsada mediante dos orugas laterales, manejada a distancia mediante una consola de mandos, y teniendo capacidad para transportar y controlar diferentes accesorios, tales como brazos articulados o cámaras móviles, que permiten llevar a cabo operaciones de riesgo, como por ejemplo la manipulación de explosivos o la exploración de zonas potencialmente peligrosas.
ANTECEDENTES DE LA INVENCiÓN
Es habitual la utilización de robots móviles autopropulsados mediante orugas para la realización de operaciones de riesgo, tales como la manipulación de explosivos o la exploración de áreas potencialmente peligrosas para el ser humano. Estos robots típicamente disponen de orugas o ruedas propulsadas por uno o varios motores que permiten su desplazamiento por terrenos variados, así como cámaras de visión y sensores diversos que suministran información del entorno al operador a través de una consola de control. Este tipo de robots permiten al operador humano la realización de misiones potencialmente peligrosas desde una distancia suficiente para garantizar su seguridad.
Los robots móviles utilizados actualmente para la realización de misiones en entornos peligrosos presentan diferentes deficiencias y posibilidades de mejora.
La primera de las deficiencias mencionadas anteriormente se refiere a la baja maniobrabilidad y movilidad en terrenos disgregados tales como arena, barro, nieve, polvo y tierra suelta. Es habitual que este tipo de materiales disgregados y de baja consistencia penetren entre las poleas de tracción del robot móvil y sus orugas, compactándose debido a la tensión de éstas, hasta alcanzar un espesor tal que provocan la aparición de una separación u holgura entre la oruga y los dientes de las poleas y, por tanto, el deslizamiento relativo de ambos componentes, y la consecuente pérdida de tracción del robot.
El fenómeno no deseable de pérdida de tracción del robot se produce debido a que la superficie de contacto entre las poleas y las orugas es elevada y, además, las poleas carecen de un método eficiente para la evacuación de la suciedad que se acumula entre su superficie exterior y la superficie interior de la oruga. Las poleas de tracción descritas en el documento de patente US7546891 adolecen de esta deficiencia debido a que dos tercios de la superficie exterior de la polea están en contacto con la oruga durante el giro y, además, la polea carece de un mecanismo de evacuación de la posible suciedad acumulada, tal y como se muestra en la figura 4g de dicho documento. Otros robots móviles similares, tales como los descritos en los documentos de patente US7926598 y US7654348 presentan la misma deficiencia
debido a la posibilidad de perder la tracción por acumulación de materiales disgregados entre sus orugas y las poleas de tracción.
La segunda deficiencia existente en los robots móviles utilizados actualmente para la realización de misiones en entornos peligrosos radica en su incapacidad para cargar y transportar objetos sin perder su capacidad de manipulación. Es habitual que los robots móviles utilizados en la exploración de zonas potencialmente peligrosas, como por ejemplo áreas contaminadas por sustancias químicas o radiactivas, tengan la necesidad de tomar muestras de materiales tales como piedras, plantas o tierra para su posterior análisis. De la misma forma, los robots de desactivación en ocasiones deben transportar artefactos no identificados o explosivos para minimizar los posibles daños que los mismos puedan ocasionar.
Los robots existentes en la actualidad pueden clasificarse en dos grupos: los que disponen de un brazo articulado con una pinza en su extremo para la manipulación de objetos y los que únicamente constan de una plataforma con varios sensores y cámaras de exploración pero sin capacidad de manipulación de objetos. Ninguno de estos dos tipos de robots tiene capacidad para cargar y transportar objetos sin perder parte de sus funcionalidades.
Los robots pertenecientes al segundo grupo, como por ejemplo el descrito en el documento de patente US7654348, no tienen capacidad de manipulación de objetos ya que, en el caso de disponer de un brazo articulado, éste únicamente es utilizado para posicionar los sensores y cámaras de visión con la orientación deseada. Por lo tanto, el brazo no puede ser utilizado para la carga y transporte de objetos. Aunque algunos de estos robots poseen un par de brazos o palas frontales que giran en torno a un eje paralelo al eje de rotación de las poleas anteriores del robot, la función de estas palas es la de facilitar la superación de obstáculos y no pueden utilizarse para la carga de objetos. La imposibilidad de cargar objetos con las palas frontales se debe a que éstas son gruesas y no pueden posicionarse de forma que su superficie superior sea paralela al suelo, con lo que es imposible deslizarlas por debajo de un objeto para cargarlo.
Los robots pertenecientes al primer grupo son aquellos que disponen de un brazo articulado con una pinza en su extremo de forma que pueden manipular y cargar objetos. Este tipo de robots pierden la funcionalidad de su brazo cuando son utilizados para transportar objetos de un lugar a otro, ya que se ven obligados a utilizar la pinza ubicada en el extremo del brazo articulado para sujetar los objetos durante su transporte.
Actualmente no existe una plataforma robótica móvil del tipo utilizado para la realización de misiones en entornos peligrosos que tenga capacidad para la carga y transporte de objetos por sí misma, sin necesidad de montar sobre ella un brazo articulado.
La tercera deficiencia existente en las plataformas robóticas móviles propulsadas por orugas radica en la mala adaptación a terrenos abruptos debido a la utilización de trenes de rodadura rígidos. Los robots móviles del tipo descrito en los documentos de patente US7546891, US7597162, US2009/0314554 y US7654348 disponen de dos orugas a ambos lados del cuerpo. Cada oruga se mantiene tensa gracias a la presencia de dos poleas cilíndricas. La primera de dichas poleas está conectada mediante un eje a la parte lateral anterior del cuerpo del robot y la segunda a la parte posterior. Típicamente sólo una de las dos poleas de cada oruga está conectada a un motor que proporciona la tracción al robot.
La distancia entre los ejes de las dos poleas de un mismo lado es tal que la oruga de dicho lado se mantiene tensa cuando el robot circula por una superficie plana. Sin embargo, cuando el robot circula por terreno abrupto, las irregularidades superficiales pueden deformar la oruga al presionar hacia arriba en puntos intermedios de la oruga que están alejados de ambas poleas. Para evitar una deformación excesiva de la oruga, que podría dificultar su tracción o incluso dañarla, los robots móviles actuales disponen de un tren de rodadura entre ambas poleas. Este tren de rodadura consta de una serie de rodillos cilíndricos que presionan la superficie interior de la oruga, impidiendo su deformación debido a irregularidades locales del terreno. De esta forma la superficie inferior de la oruga siempre se mantiene paralela a la línea imaginaria que une los centros de las poleas que mantienen tensa la oruga.
Tal y como se ha comentado anteriormente, los trenes de rodadura existentes en los robots actuales tienen sus rodillos cilíndricos rígidamente unidos al cuerpo del robot, de forma que la superficie inferior de la oruga siempre se mantiene en un mismo plano paralelo a la línea imaginaria que une los centros de las poleas que mantienen tensa la oruga. Esta rigidez del tren de rodadura impide que las orugas absorban irregularidades pequeñas del terreno, generando un movimiento de cabeceo excesivo y vibraciones elevadas en el robot cuando se desplaza. Asimismo, la rigidez del tren de rodadura limita la superficie de contacto de la oruga, que únicamente se produce con los puntos más elevados de la superficie del suelo, lo que a su vez reduce la capacidad de tracción del robot al aumentar el deslizamiento.
A partir de la descripción del estado del arte anterior se concluye que existen limitaciones importantes en las plataformas robóticas móviles que se utilizan actualmente para realizar misiones en entornos peligrosos. Estas limitaciones están vinculadas principalmente a las dificultades de desplazamiento por terrenos abruptos y a la dificultad o imposibilidad para la carga y transporte de objetos.
A la vista de lo expuesto anteriormente, un objeto de la presente invención es proporcionar un robot móvil que sea capaz de desplazarse sin dificultad por...
Reivindicaciones:
1. Una plataforma robótica móvil para la realización de misiones en entornos peligrosos que contiene un sistema de tracción mediante orugas propulsadas por poleas, caracterizado porque: -cada polea dispone de dos canales laterales (104) en los que se alojan dos guías de sección trapezoidal (301) que sobresalen de la superficie interior de la oruga, estando los canales de la polea atravesados a intervalos regulares por una serie de piezas cilíndricas de tracción (101) en las que encajan las ranuras de sección circular (302) existentes en las guías de la oruga, de forma que el engranaje entre ambas permite transmitir el movimiento de rotación de la polea a la oruga. -la superficie cilíndrica exterior comprendida entre los dos canales de cada polea es superior al 50% de la superficie cilíndrica exterior total de la polea, disponiendo dicha superficie de una serie de ranuras espaciadas a intervalos regulares que permiten la evacuación de suciedad o materiales extraños que puedan ser arrastrados por las orugas, evitando así la acumulación de los mismos entre la polea y la oruga.
2. Una plataforma robótica móvil para la realización de misiones en entornos peligrosos, según la reivindicación 1, que contiene un tren de rodadura en la parte interior inferior de cada una de sus orugas, estando formado dicho tren de rodadura por varias parejas de rodillos próximas entre sí y tangentes a la cara interna de la superficie interior de la oruga, de forma que cada pareja de rodillos consta de dos rodillos (501) conectados entre sí mediante un eje cilíndrico (506) , disponiendo cada rodillo de una ranura de sección trapezoidal en la que se aloja una de las guías (301) de la oruga y estando cada rodillo unido a la estructura del robot (502) mediante una pieza flexible (503) que permite el desplazamiento vertical del rodillo de forma independiente al desplazamiento de los rodillos adyacentes, lo que permite que la oruga se adapte a las irregularidades del terreno sin perder capacidad de tracción.
3. Una plataforma robótica móvil para la realización de misiones en entornos peligrosos, según las reivindicaciones anteriores, que contiene dos palas frontales (4) capaces de girar en torno al eje de giro de las poleas delanteras, de forma que cuando las palas están completamente replegadas quedan contenidas a ambos lados de la estructura robótica, de forma que su punto más elevado no sobresale por encima del plano superior de la estructura, siendo además su anchura total inferior a la anchura de la estructura central de la plataforma robótica, por lo que las palas en posición replegada quedan completamente contenidas entre ambas orugas.
4. Una plataforma robótica móvil para la realización de misiones en entornos peligrosos, según las reivindicaciones anteriores, caracterizada porque las palas tienen sección variable con forma de cuña, de forma que su espesor es mayor en la zona próxima a la base y se reduce cerca del extremo, pudiendo posicionarse formando cualquier ángulo con respecto a la horizontal, siendo posible colocarlas de forma que su superficie inferior quede contenida en el mismo plano que la superficie inferior de las orugas.
5. Una plataforma robótica móvil para la realización de misiones en entornos peligrosos, según las reivindicaciones anteriores, que contiene una tapa que da
acceso a las conexiones de los sistemas de control y alimentación eléctrica de la plataforma, permitiendo así el montaje de módulos externos que aumentan las funcionalidades del sistema, tales como brazos articulados, cámaras y sensores.
FIGURA 1
x
ru E
"'C
DETALLE D
L
E
501
301 301
3
SECCIÓN E -E
FIGURA 2
104~ 104
r
102
FIGURA 3
r301
e ~
FIGURA 4
FIGURA 5
FIGURA 6
FIGURA 7
FIGURA 8
FIGURA 9
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Procedimiento de tratamiento de una superficie, y autómata correspondiente, del 20 de Mayo de 2020, de Les Companions: Procedimiento de tratamiento de una superficie a tratar, por medio de un autómata que consta de: - una base configurada para […]
Manipulador de alimentos en un almacén, del 13 de Mayo de 2020, de Imaginalis S.r.l: Un manipulador de alimentos (1a) en un almacén ; comprendiendo dicho almacén una pluralidad de estaciones de almacenamiento (1b) en las que […]
Mecanismo de despliegue para normalización pasiva de un instrumento con relación a la superficie de una pieza de trabajo, del 1 de Enero de 2020, de SAUDI ARABIAN OIL COMPANY: Un aparato que se configura para transportar un instrumento y desplegar opcionalmente el instrumento en relación con una superficie que comprende: […]
Fabricación de producción ultraflexible, del 13 de Noviembre de 2019, de ABB SCHWEIZ AG: Un sistema de fabricacion que comprende: una pluralidad de celdas de trabajo , donde cada una de dichas celdas realiza uno o mas procesos […]
Aparato de distribución de carga de rueda magnética, del 21 de Agosto de 2019, de Tas Global Co., Ltd: Un aparato para limpiar el fondo de un barco en el que un aparato de distribución de carga comprende: una pluralidad de ruedas magnéticas para […]
Cortadora de alto rendimiento con pinza adaptada por unión de materiales, del 7 de Agosto de 2019, de GEA Food Solutions Germany GmbH (100.0%): Cortadora de alto rendimiento que presenta una cuchilla que corta lonchas de producto alimenticio de uno de los extremos de […]