Módulo transportador de rodillos para un sistema transportador de rodillos accionado por gravedad y método para el control de la velocidad.
Un módulo transportador de rodillos para un sistema trasportador de rodillos accionado por gravedad,
que comprende:
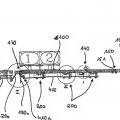
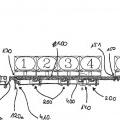
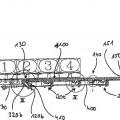
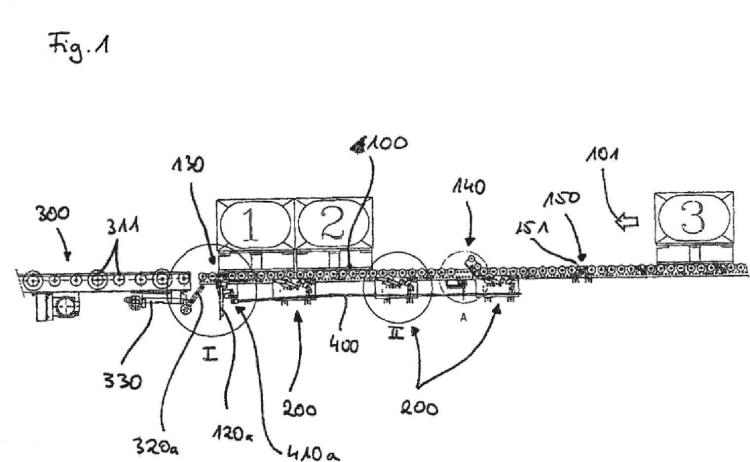
- una línea transportadora constituida por una pluralidad de rodillos transportadores (111) dispuestos uno detrás de otro, formando dicha línea transportadora una superficie de soporte superior (100) para artículos a transportar (1, 2, 3, 4) en una dirección de transporte (101) y definida por el perímetro de los rodillos transportadores;
- un mecanismo de control de la velocidad (200) con un controlador de la velocidad (210) móvil entre una primera posición engranada (210a) para controlar la velocidad de los artículos transportados (1, 2, 3, 4) y una segunda posición libre (210b) con la velocidad de los artículos transportados (1, 2, 3, 4) no controlada por el controlador de la velocidad (210);
- un accionador (120) dispuesto aguas abajo del mecanismo de control de la velocidad (200) en la dirección de transporte (101) del módulo transportador; siendo el accionador (120) móvil entre una posición de espera (120a) y una posición de accionamiento (120b);
- un mecanismo de acoplamiento (400) que acopla el accionador (120) con el mecanismo de control de la velocidad (200) de modo que el controlador de la velocidad (210) esté en la primera posición engranada (210a) cuando el accionador (120) está en su posición de espera (120a) y el controlador de la velocidad esté en la segunda posición libre (210b) cuando el accionador (120) está su posición de accionamiento (120b); en el que el controlador de la velocidad comprende un rodillo de control de la velocidad (210) que está en contacto con dos rodillos transportadores adyacentes (111) de la línea transportadora en su primera posición engranada (210a),
caracterizado porque se proporcionan dos, tres o más mecanismos de control de la velocidad (200), y porque el mecanismo de acoplamiento (400) acopla el accionador (120) con los dos, tres o más mecanismos de control de la velocidad (200),
en el que un mecanismo de detención (130) comprende un elemento de detención (131) móvil entre una posición de detención en la que el elemento de detención (131) se extiende a través de la superficie de soporte (100) y hace que un artículo transportado (1) sobre la superficie de soporte se detenga, y una posición de liberación en la que el elemento de detención (131) está ubicado por debajo de la superficie de soporte y no hace que un artículo transportado sobre la superficie de soporte se detenga, y
en el que el mecanismo de detención (130) está acoplado al accionador (120), de modo que el elemento de detención (131) esté en su posición de detención cuando el accionador (120) está su posición de espera (120a) y el elemento de detención (131) esté en su posición de liberación cuando el accionador (120) está en su posición de accionamiento (120b)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11164010.
Solicitante: INTERROLL HOLDING AG.
Nacionalidad solicitante: Suiza.
Dirección: Zona Industriale 6592 Sant' Antonino SUIZA.
Inventor/es: RAMBAUD,FRANCIS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G13/075 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 13/00 Caminos de rodadura (dispositivos de almacenamiento que tienen caminos de rodadura B65G 1/02; transportadores de cadenas sin fin que tienen rodillos que soportan la carga B65G 17/00; rodillos o sus instalaciones B65G 39/00). › Medios de frenado.
PDF original: ES-2512244_T3.pdf
Fragmento de la descripción:
Módulo transportador de rodillos para un sistema trasportador de rodillos accionado por gravedad y método para el control de la velocidad.
La invención se refiere a un módulo transportador de rodillos para un sistema trasportador de rodillos accionado por gravedad, que comprende: una línea transportadora constituida por una pluralidad de rodillos transportadores dispuestos uno detrás de otro, formando dicha línea transportadora una superficie de soporte superior para transportar artículos en una dirección de transporte y definida por el perímetro de los rodillos transportadores.
La invención se refiere, además, a un método para el control de la velocidad en un sistema trasportador de rodillos accionado por gravedad, que comprende las etapas: transportar artículos en una dirección de transporte sobre una superficie de soporte superior definida por el perímetro de una pluralidad de rodillos transportadores de una línea transportadora dispuestos uno detrás de otro.
Los sistemas trasportadores de rodillos accionados por gravedad se usan para transportar artículos, es decir, en el almacenamiento de palés, contenedores, cajas o similares. Los módulos transportadores de rodillos para un sistema trasportador de rodillos accionado por gravedad están compuestos por una pluralidad de rodillos transportadores adyacentes que forman una línea transportadora. El perímetro externo de los rodillos transportadores define una superficie de soporte superior en la que artículos a transportar, por ejemplo palés o contenedores, se colocan y son transportados en una dirección de transporte. En condiciones operativas, el módulo transportador de rodillos está habitualmente dispuesto de modo que la dirección de transporte está ligeramente en ángulo hacia abajo de modo que los artículos transportados sean transportados a lo largo de la dirección de transporte gracias a la gravedad. En el extremo aguas abajo de un sistema trasportador de rodillos accionado por gravedad, los artículos transportados típicamente son transferidos a un sistema de manipulación adicional, por ejemplo una carretilla elevadora de horquilla, transelevador u otro sistema de transporte, particularmente a un transportador adicional de una carretilla elevadora de horquilla, transelevador u otro sistema de transporte.
El documento JP-H-05-56819-U desvela un dispositivo de detención temporal para un artículo portado sobre un transportador de rodillos para impedir la deformación o el daño de un artículo portado. El documento JP-H-05568119-U desvela que un tope, que permanecía por debajo de la superficie de transferencia, es alzado antes de que un artículo alcance la posición del tope. Al mismo tiempo que esta acción, dos rodillos portadores que están detrás del tope son detenidos por una zapa de freno. Por consiguiente, el artículo que era transferido hacia el tope es llevado a un estado de freno aplicado cuando el artículo se monta sobre los dos rodillos portadores detenidos.
El documento JP 63-100413 desvela un módulo transportador de rodillos según el preámbulo de la reivindicación 1.
En sistemas trasportadores de rodillos accionados por gravedad y módulos transportadores de rodillos para dichos sistemas, se buscan mejoras continuas relacionadas con el control del flujo de artículos. Además, se buscan mejoras 40 continuas para un funcionamiento seguro para sistemas trasportadores de rodillos accionados por gravedad.
Es un objeto de la presente invención mejorar módulos transportadores de rodillos existentes y métodos para el control de la velocidad en sistemas trasportadores de rodillos accionados por gravedad en una o más de las direcciones de mejora deseadas mencionadas anteriormente.
Este objetivo se resuelve mediante un módulo transportador de rodillos para un sistema trasportador de rodillos accionado por gravedad según la reivindicación 1 y mediante un método según la reivindicación 11.
Un módulo transportador de rodillos según la invención comprende un mecanismo de control de la velocidad que 50 puede encenderse y apagarse, es decir el mecanismo de control de la velocidad tiene dos modos de funcionamiento, un modo de control de la velocidad y un modo de flujo libre que se explicarán con más detalle a continuación.
Durante el funcionamiento del sistema trasportador de rodillos accionado por gravedad, es preferente que un módulo transportador de rodillos controle la velocidad de los artículos transportados, es decir frene los artículos y ralentice su 55 velocidad para evitar un movimiento a alta velocidad incontrolado de los artículos transportados. Esto es particularmente preferente para un módulo transportador de rodillos que está situado en el extremo aguas abajo en la dirección de transporte de un sistema trasportador de rodillos accionado por gravedad, donde los artículos transportados son transferidos a otro sistema de manipulación o traslado de artículos, por ejemplo una carretilla elevadora de horquilla, transelevador u otro sistema de transporte. Esta transferencia a un sistema de manipulación
tienen que almacenarse en el extremo aguas abajo del sistema trasportador de rodillos accionado por gravedad. Por lo tanto, es preferente controlar la velocidad de transporte, particularmente en un módulo transportador de rodillos ubicado en el extremo aguas abajo de un sistema trasportador de rodillos accionado por gravedad. Sin embargo, para acelerar el proceso de transferencia y para reducir el tiempo necesario para que uno o varios artículos sean transferidos desde un módulo transportador de rodillos en el extremo aguas abajo del sistema trasportador de rodillos accionado por gravedad a un sistema de manipulación o traslado de artículos adicional, es preferente que los artículos puedan moverse a una velocidad elevada sobre la sección restante de la línea transportadora. El módulo transportador de rodillos según la invención tiene la ventaja de permitir que un mecanismo de control de la velocidad funcione en un modo de control de la velocidad, es decir en un modo de funcionamiento donde la velocidad de los artículos está controlada directa o indirectamente. En un sistema trasportador de rodillos accionado por gravedad, control de la velocidad significa principalmente frenar o retardar los artículos a transportar. Un control de la velocidad directo controla directamente la velocidad de los artículos transportados sobre la superficie de soporte superior de la línea transportadora para transportar artículos en la dirección de transporte. Un control de la velocidad indirecto, por ejemplo, controla la velocidad de los rodillos transportadores y, por lo tanto, controla sólo indirectamente la velocidad de los artículos. Además, el mecanismo de control de la velocidad del módulo transportador de rodillos según la invención puede funcionar en a modo de flujo libre durante periodos en los que no tiene lugar ninguna transferencia de artículos, es decir en un modo de funcionamiento sin ningún control de velocidad y, por lo tanto, con una movimiento a alta velocidad de los artículos transportados. En este caso, la velocidad de los artículos transportados está limitada solamente por la velocidad de transporte (máxima o deseada) de cualquier sistema de manipulación o traslado de artículos adicional al que son transferidos los artículos. Estos dos modos de funcionamiento del mecanismo de control de la velocidad son ejecutados por el controlador de la velocidad: en el modo de control de la velocidad, el controlador de la velocidad está en su primera posición engranada y controla la velocidad de los artículos transportados, es decir frena los artículos de modo que su velocidad no supere cierta velocidad deseada. En el modo de flujo libre, el controlador de la velocidad está en una segunda posición libre y no controla la velocidad de los artículos transportados, es decir los artículos se mueven con una velocidad que depende del ángulo de la dirección de transporte así como de las características de los artículos transportados y la línea transportadora. El modo de funcionamiento encendido del controlador de la velocidad es accionado por un accionador que está acoplado al mecanismo de control de la velocidad mediante un mecanismo de acoplamiento.... [Seguir leyendo]o traslado de artículos adicional en el extremo aguas abajo de un sistema trasportador de rodillos accionado por gravedad normalmente es un proceso discontinuo, es decir los artículos son transferidos al sistema de manipulación
Reivindicaciones:
1. Un módulo transportador de rodillos para un sistema trasportador de rodillos accionado por gravedad, que comprende: 5
- una línea transportadora constituida por una pluralidad de rodillos transportadores (111) dispuestos uno detrás de otro, formando dicha línea transportadora una superficie de soporte superior (100) para artículos a transportar (1, 2, 3, 4) en una dirección de transporte (101) y definida por el perímetro de los rodillos transportadores;
- un mecanismo de control de la velocidad (200) con un controlador de la velocidad (210) móvil entre una primera posición engranada (210a) para controlar la velocidad de los artículos transportados (1, 2, 3, 4) y una segunda posición libre (210b) con la velocidad de los artículos transportados (1, 2, 3, 4) no controlada por el controlador de la velocidad (210) ;
- un accionador (120) dispuesto aguas abajo del mecanismo de control de la velocidad (200) en la dirección de transporte (101) del módulo transportador; siendo el accionador (120) móvil entre una posición de espera (120a) y una posición de accionamiento (120b) ;
- un mecanismo de acoplamiento (400) que acopla el accionador (120) con el mecanismo de control de la velocidad (200) de modo que el controlador de la velocidad (210) esté en la primera posición engranada (210a) cuando el accionador (120) está en su posición de espera (120a) y el controlador de la velocidad esté en la segunda posición libre (210b) cuando el accionador (120) está su posición de accionamiento (120b) ;
en el que el controlador de la velocidad comprende un rodillo de control de la velocidad (210) que está en contacto 25 con dos rodillos transportadores adyacentes (111) de la línea transportadora en su primera posición engranada (210a) , caracterizado porque se proporcionan dos, tres o más mecanismos de control de la velocidad (200) , y porque el mecanismo de acoplamiento (400) acopla el accionador (120) con los dos, tres o más mecanismos de control de la 30 velocidad (200) , en el que un mecanismo de detención (130) comprende un elemento de detención (131) móvil entre una posición de detención en la que el elemento de detención (131) se extiende a través de la superficie de soporte (100) y hace que un artículo transportado (1) sobre la superficie de soporte se detenga, y una posición de liberación en la que el elemento de detención (131) está ubicado por debajo de la superficie de soporte y no hace que un artículo transportado sobre la superficie de soporte se detenga, y en el que el mecanismo de detención (130) está acoplado al accionador (120) , de modo que el elemento de detención (131) esté en su posición de detención cuando el accionador (120) está su posición de espera (120a) y el 40 elemento de detención (131) esté en su posición de liberación cuando el accionador (120) está en su posición de accionamiento (120b)
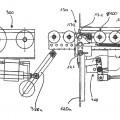
2. El módulo transportador de rodillos de la reivindicación anterior, 45 caracterizado porque el mecanismo de control de la velocidad (200) comprende un mecanismo de palanca (221, 222, 223, 224, 225) que conecta el mecanismo de acoplamiento (400) con el controlador de la velocidad (210) .
3. El módulo transportador de rodillos de cualquiera de las reivindicaciones anteriores, 50 caracterizado porque el mecanismo de control de la velocidad (200) comprende al menos un elemento elástico (250) , preferentemente al menos un muelle, que empuja al controlador de la velocidad (210) a su primera posición engranada (210a) .
4. El módulo transportador de rodillos de cualquiera de las reivindicaciones anteriores, 55 caracterizado porque el accionador (120) comprende una palanca de accionamiento pivotable alrededor de un punto pivotante (121) .
5. El módulo transportador de rodillos de cualquiera de las reivindicaciones anteriores,
caracterizado porque el mecanismo de acoplamiento (400) comprende una biela de acoplamiento móvil en una dirección de engrane (A) y en una dirección de desengrane (B) , en el que preferentemente la dirección de engrane es opuesta a la dirección de desengrane.
6. El módulo transportador de rodillos de cualquiera de las reivindicaciones anteriores, caracterizado por un mecanismo de separación (150) que comprende un elemento separador (151) móvil entre una posición de detención en la que el elemento separador (151) se extiende a través de la superficie de soporte (100) y hace que un artículo transportado (5) sobre la superficie de soporte se detenga, y una posición de liberación en la que el elemento separador (151) está ubicado por debajo de la superficie de soporte y no hace que un artículo transportado sobre la superficie de soporte se detenga.
7. El módulo transportador de rodillos de la reivindicación anterior, caracterizado porque el mecanismo de separación (150) está acoplado a un mecanismo de pedal (140) , de modo que el elemento separador (151) se mueva a su posición de detención cuando un pedal (140a) del mecanismo de pedal (140) es activado y el elemento separador (151) puede moverse a su posición de liberación cuando el pedal (140a) del mecanismo de pedal (140) se mueve a una posición de liberación.
8. El módulo transportador de rodillos de la reivindicación anterior, caracterizado porque el mecanismo de separación (150) está acoplado al mecanismo de acoplamiento (400) mediante el mecanismo de pedal (140) , de modo que el elemento separador (151) esté bloqueado en su posición de detención cuando el accionador (120) está en su posición de accionamiento (120b) y el mecanismo de pedal (140) está bloqueado en una posición activada.
9. El módulo transportador de rodillos de una de las dos reivindicaciones anteriores, caracterizado porque el mecanismo de pedal (140) está acoplado al mecanismo de acoplamiento (400) mediante un conector (420) del mecanismo de acoplamiento (400) y un elemento de conexión (142) del elemento de bloqueo (140b) , de modo que el mecanismo de pedal esté bloqueado en su posición activada cuando el accionador (120) está en su posición de accionamiento (120b) .
10. El módulo transportador de rodillos de cualquiera de las reivindicaciones anteriores, caracterizado porque los dos, tres o varios mecanismos de control de la velocidad (200) están, cada uno, acoplados al accionador (120) mediante la misma biela de acoplamiento.
11. Un método para el control de la velocidad en un sistema trasportador de rodillos accionado por gravedad, que comprende las etapas:
- transportar los artículos (1, 2, 3, 4) en una dirección de transporte (101) sobre una superficie de soporte superior (100) definida por el perímetro de una pluralidad de rodillos transportadores (111) de una línea transportadora 45 dispuestos uno detrás de otro;
- controlar la velocidad de los artículos transportados mediante un mecanismo de control de la velocidad (200) que comprende un controlador de la velocidad (210) en una primera posición engranada (210a) mientras un accionador (120) dispuesto aguas abajo del mecanismo de control de la velocidad (200) en la dirección de transporte (101) y 50 acoplado al mecanismo de control de la velocidad (200) mediante un mecanismo de acoplamiento (400) está en una posición de espera (120b) ;
- dejar de controlar la velocidad de los artículos transportados moviendo los controladores de la velocidad (210) a una segunda posición libre (210b) cuando el accionador (120) se mueve a una posición de accionamiento (120b) ; 55
- comprendiendo el controlador de la velocidad un rodillo controlador de la velocidad (210) que está en contacto con dos rodillos transportadores adyacentes (111) de la línea transportadora en su primera posición engranada (210a) , caracterizado por que la velocidad es controlada por dos, tres o más mecanismos de control de la velocidad (200) acoplados al accionador (120) mediante el mecanismo de acoplamiento (400)
- y en el que un mecanismo de detención (130) comprende un elemento de detención (131) móvil entre una posición de detención en la que el elemento de detención (131) se extiende a través de la superficie de soporte (100) y hace que un artículo transportado (1) sobre la superficie de soporte se detenga, y una posición de liberación en la que el elemento de detención (131) está ubicado por debajo de la superficie de soporte y no hace que un artículo transportado sobre la superficie de soporte se detenga, - en el que el mecanismo de detención (130) está acoplado al accionador (120) , de modo que el elemento de detención (131) esté en su posición de detención cuando el accionador (120) está su posición de espera (120a) y el elemento de detención (131) esté en su posición de liberación cuando el accionador (120) está en su posición de accionamiento (120b) .
Patentes similares o relacionadas:
 Rodillo con un freno de corriente parásita, del 28 de Septiembre de 2016, de INTERROLL HOLDING AG: Rodillo (5; 5a; 5b) con las siguientes características:
- una envoltura de rodillo tubular montada en un cojinete fijo de manera giratoria alrededor […]
Rodillo con un freno de corriente parásita, del 28 de Septiembre de 2016, de INTERROLL HOLDING AG: Rodillo (5; 5a; 5b) con las siguientes características:
- una envoltura de rodillo tubular montada en un cojinete fijo de manera giratoria alrededor […]
 RUEDA DE FRENADO PARA UN CARRIL DE TRANSPORTE DE MERCANCÍAS Y SISTEMA PARA DESPLAZAR POR GRAVEDAD MERCANCÍAS QUE INCLUYE DICHA RUEDA DE FRENADO, del 9 de Abril de 2015, de DINALAGER, S.L.: Rueda de frenado para un carril de transporte por gravedad que comprende un cuerpo sustancialmente cilíndrico dispuesto para rodar alrededor de un […]
RUEDA DE FRENADO PARA UN CARRIL DE TRANSPORTE DE MERCANCÍAS Y SISTEMA PARA DESPLAZAR POR GRAVEDAD MERCANCÍAS QUE INCLUYE DICHA RUEDA DE FRENADO, del 9 de Abril de 2015, de DINALAGER, S.L.: Rueda de frenado para un carril de transporte por gravedad que comprende un cuerpo sustancialmente cilíndrico dispuesto para rodar alrededor de un […]
 Rodillo de transporte con freno y regulador de la inhibición, del 9 de Julio de 2014, de BITO-LAGERTECHNIK BITTMANN GMBH: Rodillo de transporte con freno con un tambor , un eje de rotación del tambor y un regulador de la inhibición, poseyendo el regulador de […]
Rodillo de transporte con freno y regulador de la inhibición, del 9 de Julio de 2014, de BITO-LAGERTECHNIK BITTMANN GMBH: Rodillo de transporte con freno con un tambor , un eje de rotación del tambor y un regulador de la inhibición, poseyendo el regulador de […]
 Rodillo de frenado, del 23 de Octubre de 2013, de INTERROLL HOLDING AG: Rodillo transportador , que comprende un elemento de camisa cilíndrico , al menos una cubierta lateral que cubre una cara lateral del rodillo transportador , […]
Rodillo de frenado, del 23 de Octubre de 2013, de INTERROLL HOLDING AG: Rodillo transportador , que comprende un elemento de camisa cilíndrico , al menos una cubierta lateral que cubre una cara lateral del rodillo transportador , […]
Rodillo transportador con freno magnético que funciona con fuerza centrífuga, del 10 de Octubre de 2012, de INTERROLL HOLDING AG: Un rodillo de avance , que comprende un elemento de cubierta , un eje y un frenomagnético que tiene un componente magnético y un componente […]
APARATO DE ROTACIÓN DE ARTÍCULOS, del 13 de Enero de 2012, de FKI LOGISTEX INC: Un aparato que rota de forma selectiva artículos sin impactar ni contactar con sus frontales o laterales, que comprende un primer transportador que […]
TRANSPORTADOR SOBRE RODILLOS., del 16 de Mayo de 2004, de TGW-TRANSPORTGERITE GMBH: Transportador sobre rodillos con una serie de rodillos sustentados por un bastidor , que se asignan a diferentes secciones y a cada sección se […]
 TRANSPORTADOR DE RODILLOS CON FRENO, del 14 de Octubre de 2010, de MIRANDA I VILAGRASA,RICARD: 1. Transportador de rodillos con freno, del tipo que comprende un bastidor con unos rodillos sobre los que se disponen unos paquetes […]
TRANSPORTADOR DE RODILLOS CON FRENO, del 14 de Octubre de 2010, de MIRANDA I VILAGRASA,RICARD: 1. Transportador de rodillos con freno, del tipo que comprende un bastidor con unos rodillos sobre los que se disponen unos paquetes […]