MÉTODO Y SISTEMA PARA REPLANTEO AUTOMÁTICO Y CONTINUO EN OBRAS DE EXCAVACIÓN/PERFORACIÓN DE UN TÚNEL Y PROGRAMA DE ORDENADOR PARA EJECUTAR DICHO MÉTODO.
Método y sistema para replanteo automático y continuo en obras de excavación/perforación de un túnel y programa de ordenador para ejecutar dicho método.
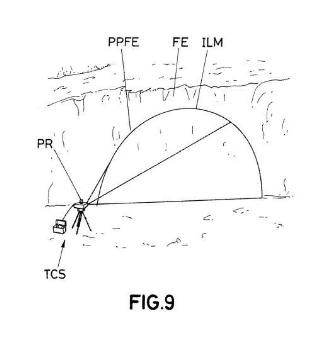
Se propone un método para replantear sobre el frente de excavación (FE) de un túnel puntos de control representativos de la sección, recorrido y bóveda ideales del mismo. Sobre el frente de excavación se forman imágenes luminosas de marcado (IML) del perfil de túnel a excavar, proyectando luz láser sobre dicho frente; estas imágenes son calculadas y proyectadas basándose en la intersección entre una superficie mallada, modelada a partir de datos medidos, mediante escaneado láser, sobre puntos del frente de excavación (PPFE) y otra superficie mallada, modelada a partir de datos topográficos (DTP) previamente determinados a través del proyecto de excavación del túnel y que define la bóveda ideal o teórica de dicho túnel. Se proporciona un sistema (TCS) para medir, calcular y proyectar las imágenes permitiendo la ejecución del método.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201030861.
Solicitante: SACYR S.A.U..
Nacionalidad solicitante: España.
Inventor/es: GONZALEZ JIMENEZ,JAVIER, GALINDO ANDRADES,CIPRIANO, BLANCO CLARACO,JOSE LUIS, ESTEBAN HOYAS,ANTONIO, RAMIREZ RODRIGUEZ,ANTONIO, AREVALO ESPEJO,VICENTE, MATEOS ARMESTO,Francisco Javier, MORENO DUEÑAS,Francisco A.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- E21D11/00 CONSTRUCCIONES FIJAS. › E21 PERFORACION DEL SUELO O DE LA ROCA; EXPLOTACION MINERA. › E21D POZOS; TUNELES; GALERIAS; GRANDES CAMARAS SUBTERRANEAS (materiales para acondicionar o estabilizar el suelo C09K 17/00; máquinas cortantes para la explotación de minas o canteras E21C; dispositivos de seguridad, de transporte, de salvamento, de ventilación o de drenaje E21F). › Revestimiento de túneles o galerías u otras cavidades subterráneas, p. ej. grandes cámaras subterráneas; Revestimientos a este efecto; Ejecución de tales revestimientos in situ , p. ej. por ensamblaje (E21D 15/00 - E21D 23/00 tienen prioridad; especialmente para pozos E21D 5/00; revestimientos de galerías de agua a presión, revestimientos a este efecto E02B 9/06).
- E21D9/00 E21D […] › Túneles o galerías, con o sin revestimientos; Procedimientos o aparatos para su ejecución (revestimientos en sí E21D 11/00; galerías de protección contra la caída de rocas o las avalanchas E01F 7/04 ); Trazado de túneles o de galerías.
- G01C15/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Instrumentos o accesorios topográficos no previstos en los grupos G01C 1/00 - G01C 13/00.
Fragmento de la descripción:
Método y sistema para replanteo automático y continuo en obras de excavación/perforación de un túnel y programa de ordenador para ejecutar dicho método. Ámbito y técnica anterior La invención se refiere de manera general a un método y a un sistema para el replanteo de puntos de control en obras de excavación/perforación de túneles. El replanteo es una operación necesaria en cualquier obra de construcción para trasladar sobre el terreno de la manera más fielmente posible las dimensiones y formas indicadas en el proyecto técnico de la obra. En particular en la construcción de túneles, la operación de replanteo supone la señalización de manera material de puntos de apoyo, puntos de referencia y de control de la obra tanto en la bóveda como en los hastiales y en la rasante de la excavación. La operación de replanteo implica por una parte la localización sobre el terreno de los puntos de referencia que figuran en la documentación técnica de la obra y la posterior señalización material sobre el terreno de los puntos localizados. Aunque en la actualidad se encuentran disponibles las llamadas estaciones totales robotizadas incluso con capacidad de medir a sólido, es decir sin necesidad de prismas reflectores, que permiten la identificación
automática de los puntos de referencia del proyecto y su señalización sobre el terreno mediante un puntero láser, la marcación de estos puntos se realiza con la ayuda de clavos metálicos y marcas de pintura para su 5 utilización como referencias planimétricas y/o altimétricas para la obra. El método operativo de replanteo actualmente utilizado, conforme se ha descrito anteriormente, presenta numerosos inconvenientes. En efecto los 1 O técnicos topógrafos calculan y marcan los puntos del arco de la bóveda, lo que de manera general exige la utilización de plataformas elevadoras, escaleras y estructuras de andamio que deben retirarse y/o desmontarse para efectuar la perforación, y ello de 15 manera repetitiva a medida que la excavación del túnel progresa. Estas tareas además de requerir intensivamente tiempo y mano de obra especializada así como la utilización de equipamiento auxiliar, resultan 20 potencialmente peligrosas para los operarios que deben trabajar en altura para ejecutar materialmente las marcas de referencia. Además, como las marcas de pintura quedan borradas tan pronto como la maquinaria de excavación comienza a trabajar, pueden originarse 25 sobre-excavaciones que para ser evitadas exigen la materialización de mayor número de puntos de control y de manera más frecuente. Sumario de la invención 30Partiendo del estado de la técnica precedentemente descrito, la invención se plantea como objetivo el
desarrollo de un método y un sistema de replanteo conforme se indicó en un principio que permitan solucionar los problemas planteados. La invención parte de la idea de formar sobre el frente de excavación o frente de obra imágenes de marcado del perfil de túnel a excavar mediante la proyección de luz láser sobre dicho frente de obra, siendo dichas imágenes luminosas de marcado calculadas y proyectadas basándose en datos medidos sobre puntos del frente de excavación y datos topográficos de la sección y recorrido del túnel
previamente determinados a través del proyecto de excavación del túnel. De acuerdo con la invención este objetivo se alcanza, en cuanto al método se refiere, a través de las características indicadas en la reivindicación l.Ventajas y objetivos adicionales del método se alcanzan a través de las características indicadas en las reivindicaciones de método dependientes.
El método conforme a la invención se caracteriza porque sobre el frente de excavación se forman imágenes de marcado del perfil de túnel a excavar mediante la proyección de luz láser sobre dicho frente de excavación, siendo dichas imágenes luminosas de marcado calculadas y proyectadas basándose en la intersección entre una superficie mallada poligonalmente, modelada a partir de datos medidos, mediante escáner láser, sobre puntos pertenecientes al frente de excavación y otra superficie también mallada poligonalmente modelada, a partir de los datos topográficos del proyecto de excavación y que define la bóveda teórica o ideal del túnel. Según una característica adicional de la invención, dicho método comprende etapas de: - medición, mediante escáner láser, del frente de excavación para obtener un conjunto denso de puntos 5 pertenecientes a dicho frente de excavación, estando expresado dicho conjunto denso de puntos mediante un primer conjunto de datos referidos a un sistema referencia de medición con origen en un punto de medición; 1 O adquisición de dicho primer conjunto de datos obtenido en la etapa de medición; lectura desde un fichero de los datos topográficos del proyecto representativos del perfil y recorrido ideales del túnel; 15 -transformación de dichos datos topográficos del proyecto leídos al sistema de referencia de medición para obtener un segundo conjunto de datos transformados; combinación del primer conjunto de datos 20 relativo a los puntos pertenecientes al frente de excavación obtenido en la etapa de medición con el segundo conjunto de datos relativos a los datos topográficos del proyecto obtenido en la etapa de transformación, para obtener la intersección entre una 25 superficie mallada poligonalmente, modelada a partir de dicho primer conjunto datos y otra superficie también mallada poligonalmente, modelada a partir de dicho segundo conjunto de datos; desde un punto de proyección origen de un 30 sistema de referencia de proyección, proyectar sobre el frente de excavación haces coherentes de luz láser para formar sobre dicho frente de excavación imágenes
luminosas de marcado representativas del perfil a excavar, siendo controlada la proyección de los haces de luz láser por información de control generada en una etapa de generación a partir de los datos resultantes de la citada intersección previamente transformados al sistema de referencia de proyección en una etapa de transformación adicional.
De acuerdo con una característica adicional de la invención resulta ventajoso que el mallado poligonal sea un mallado triangular.
Aún de acuerdo con una característica adicional de la invención el método incluye una etapa posicionamiento relativo de los sistemas de referencia de medición y proyección.
Conforme con otra característica adicional de la invención resulta ventajoso llevar a cabo la etapa de
posicionamiento mediante técnicas de calibración de cámaras de visión por computador. También de acuerdo con una característica adicional de la invención la etapa de posicionamientose realiza mediante proyección de patrones de luz sobre puntos previamente levantados y aplicando técnicas de calibración de cámaras de visión por computador.
Además, de acuerdo con una característica adicional de la invención la imagen luminosa de marcado se proporciona como un arco o conjunto de puntos más o menos denso que bordea el exterior del túnel.
También de acuerdo con una característica adicional de la invención la imagen luminosa de marcado puede incluir información adicional contenida en los datos topográficos del proyecto de excavación del túnel.
Además de acuerdo con una característica adicional
de la invención la información adicional incluida en la imagen luminosa de marcado puede ser el punto kilométrico de la excavación. 5 Aún de acuerdo con una característica adicional de la invención la imagen luminosa de marcado se forma con zonas de coloración diversa para indicar las diferencias de posición entre puntos pertenecientes al frente de excavación y puntos de control del perfil a 1 O excavar. Otro objetivo de la invención...
Reivindicaciones:
- lectura (13) desde un fichero (FI) de los datos
topográficos del proyecto (DTP) representativos del perfil y recorrido ideales del túnel;
- transformación (14) de dichos datos topográficos
(DTP) del proyecto leídos al sistema de referencia de medición (SRM) para obtener un segundo conjunto de datos transformados (CD2) ;
- combinación (15) del primer conjunto de datos
(CD1) relativo a los puntos pertenecientes al frente de excavación (PPFE) obtenido en la etapa de medición con el segundo conjunto de datos (CD2) relativo a los datos topográficos del proyecto obtenido en la etapa de transformación (14) , para obtener la intersección entre una superficie mallada poligonalmente, modelada a partir de dicho primer conjunto de datos (CD1) y otra superficie también mallada poligonalmente, modelada a partir de dicho segundo conjunto de datos (CD2) ;
- desde un punto de proyección (Op) origen de un sistema de referencia de proyección (SRP) , proyectar
(18) sobre el frente de excavación (FE) haces coherentes de luz láser para formar sobre dicho frente de excavación imágenes luminosas de marcado (ILM) representativas del perfil a excavar, siendo controlada la proyección de los haces de luz láser por información de control (IC) generada en una etapa de generación
(17) a partir de los datos resultantes de la citada la intersección previamente transformados al sistema de referencia de proyección ( SRP) en una etapa de transformación adicional (16)3.
4. Método de acuerdo las reivindicaciones precedentes caracterizado por que incluye una etapa de posicionamiento para posicionamiento relativo de los sistemas de referencia de medición y proyección (SRM, SRP)
5. Método de acuerdo con la reivindicación 4, caracterizado por que la etapa de posicionamiento se lleva a cabo mediante técnicas de calibración de cámaras de visión por computador.
6. Método de acuerdo con la reivindicación 4, caracterizado por que la etapa de posicionamiento se realiza mediante proyección de patrones de luz sobre puntos previamente levantados y aplicando técnicas de calibración de cámaras de visión por computador.
7. Método de acuerdo con al menos una de las reivindicaciones precedentes, caracterizado por que la imagen luminosa de marcado (IML) es un arco continuo o secuencia de puntos que bordea el exterior del túnel.
8. Método de acuerdo con al menos una de las reivindicaciones precedentes caracterizado por que la imagen luminosa de marcado (IML) incluye información adicional contenida en los datos topográficos (DTP) del proyecto de excavación del túnel.
9. Método de acuerdo con la reivindicación 8, caracterizado por que la información adicional incluida en la imagen luminosa de marcado es un punto kilométrico de la excavación.
1O. Método de acuerdo con al menos una de las reivindicaciones 7 a 9 caracterizado por que la imagen luminosa de marcado se forma con zonas de coloración diversa para indicar las diferencias de posición entre
puntos pertenecientes al frente de excavación (PPFE) y
puntos de control del perfil a excavar.
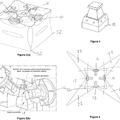
11. Sistema para replanteo automático en obras de excavación/perforación de un túnel para ejecutar el método conforme a las reivindicaciones 1 a 1O caracterizado dicho sistema (TCS) por que comprende:
un subsistema de medición láser (SML) que mediante escaneado láser del frente de excavación permite obtener un conjunto denso de puntos pertenecientes a dicho frente de excavación (PPFE) , expresándose dicho conjunto denso de puntos mediante un primer conjunto de datos (CD1) referidos a un sistema
referencia de medición (SRM) con origen en un punto de medición (Oe) ; un subsistema de marcado continuo (SMC)incluyendo un proyector láser (PYL) que desde un punto de proyección (Op) origen de un sistema de referencia de proyección ( SRP) permite proyectar de manera continua sobre el frente de excavación una luz láser y formar sobre dicho frente de excavación imágenes luminosas de marcado (ILM) representativas del perfil de túnel a excavar; y
- un subsistema de control y procesamiento (SCP) que comprende:
medios de adquisición (1) para adquirir el primer conjunto de datos (CD1) de puntos pertenecientes a dicho frente de excavación (PPFE) obtenidos a través del sistema de medición láser (SML) ;
-medios de lectura (2) para leer desde un fichero (FI) los datos topográficos (DTP) del proyecto de excavación de dicho túnel; - medios de transformación (3) para transformar al sistema de referencia de medición (SRM) dichos datos topográficos del proyecto leídos, para así obtener un segundo conjunto de datos transformados (CD2) ; 5 medios de combinación (4) para combinar el primer conjunto de datos (CD1) relativo a los puntos pertenecientes al frente de excavación (PPFE) obtenido con el subsistema de medición láser con el segundo conjunto de datos (CD2) relativo a los datos 1 O topográficos del proyecto obtenido por los medios de transformación (3) , para obtener la intersección entre una superficie mallada poligonalmente, modelada a partir de dicho primer conjunto de datos (CD1) y otra malla superficie también mallada poligonalmente, 15 modelada a partir de dicho segundo conjunto de datos (CD2) ; medios de transformación adicionales (5) para transformar al sistema de referencia de proyección (SRP) del subsistema de marcado continuo (SMC) los 20 datos de dicha intersección; y medios de generación (6) para generar información de control (IC) para el subsistema de marcado continuo (SMC) a partir de los datos de dicha intersección transformados por los medios de 25 transformación adicionales (5) , estando dicha información de control adaptada para control del proyector láser (PYL) del subsistema de marcado continua (SMC) permitiendo así la proyección mediante dicho proyector láser (PYL) de las imágenes luminosas 30 de marcado ( ILM) 12. Sistema de acuerdo con la reivindicación 11 caracterizado por que el subsistema de medición láser
(SML) incluye un escáner (ES) que está montado para desplazarse sobre un dispositivo de motorización (DM) ambos controlados por el subsistema de control y procesamiento (SCP) para el barrido de la totalidad del
frente de excavación (FE) .
13. Sistema de acuerdo con la reivindicación 12 caracterizado por que el escáner (ES) es un escáner de barrido radial, siendo el dispositivo de motorización
(DM) una unidad giratoria dispuesta para mover 1 O verticalmente el escáner y así realizar el barrido de la totalidad del frente de excavación (FE)
14. Sistema de acuerdo al menos una de las reivindicaciones 11 a 13 caracterizado porque el subsistema de medición láser (SML) y el subsistema de
marcado continuo (SMC) están montados sobre una estructura fija (EF) .
15. Sistema de acuerdo con la reivindicación 14 caracterizado porque la estructura fija (EF) lleva montados prismas reflectores (PR) que permiten el
posicionamiento mediante técnicas topográficas.
16. Sistema de acuerdo con la reivindicación 11 caracterizado porque el subsistema de control y procesamiento (SCP) se implementa como un ordenador de abordo.
17. Sistema de acuerdo con la reivindicación 16, caracterizado por que el ordenador de abordo está previsto con capacidad de conexión inalámbrica para formar una red de comunicaciones inalámbricas (RCI) con equipos de usuario (EU) remotos.
30 18. Programa de ordenador que comprende instrucciones de código de programa para la ejecución de al menos una de las etapas del método de acuerdo las
reivindicaciones 1 a 10, cuando dicho programa se ejecuta en un ordenador.
Patentes similares o relacionadas:
Nivel láser con soporte ajustable, del 22 de Julio de 2020, de KAPRO INDUSTRIES LTD.: Un nivel láser para ser colocado sobre una superficie de referencia horizontal, comprendiendo el nivel láser: (a) un cuerpo de nivel láser para proyectar […]
APARATO ASISTENTE DE LA ESTACIÓN TOTAL PARA LA MEDICIÓN CON OBSTÁCULOS, APLICADO A TOPOGRAFÍA, del 4 de Junio de 2020, de GÓMEZ PALACIO, Sergio: La presente invención se refiere a un dispositivo o aparato asistente de la estación total en topografía, el cual es usado para la medición con obstáculos, […]
Sistema de corrección de alineación y métodos de uso del mismo, del 6 de Mayo de 2020, de GILSON, INC.: Un sistema de corrección de alineación que comprende (a) una base que tiene una superficie base con una o más ubicaciones objetivo, en donde cada ubicación […]
Sistema de medición de desplazamiento de vía férrea y procedimiento para mantenimiento proactivo, del 5 de Febrero de 2020, de Siemens Mobility Pty Ltd: Un sistema de medición para determinar el desplazamiento físico de una vía férrea durante el uso de la vía férrea , […]
Procedimiento y sistema para determinar un objetivo, del 18 de Diciembre de 2019, de Vricon Systems Aktiebolag: Un procedimiento de determinación de la posición de un blanco, comprendiendo el procedimiento las etapas de: - medir con un dispositivo de […]
 Cámara, del 27 de Noviembre de 2019, de Nctech Ltd: Cámara panorámica que presenta un campo de visión global de 360° y configurada para capturar una imagen de 360° de una escena que se extiende alrededor […]
Cámara, del 27 de Noviembre de 2019, de Nctech Ltd: Cámara panorámica que presenta un campo de visión global de 360° y configurada para capturar una imagen de 360° de una escena que se extiende alrededor […]
Encofrado ascendente y procedimiento para la erección de una estructura de hormigón, del 2 de Octubre de 2019, de DOKA GmbH: Un encofrado ascendente para la erección de una estructura de hormigón vertiendo sucesivamente una pluralidad de segmentos de colada, comprendiendo […]
Dispositivo de nivelación láser basado en acelerómetro, del 4 de Septiembre de 2019, de MEDTRONIC XOMED, INC.: Un sistema de nivelación láser para su uso con un sistema de drenaje de paciente , que comprende: una carcasa ; un soporte de montaje acoplado a la carcasa […]