MÉTODO Y SISTEMA DE DETECCIÓN DE PROXIMIDAD ENTRE OBJETOS DESPLAZABLES EN UN ÁREA DE COBERTURA.
Método y sistema de detección de proximidad entre objetos desplazables en un área de cobertura.
Los objetos comprenden balizas de generación y de recepción de señales en un área de cobertura. El nuevo método y sistema combinan la emisión de señales infrarrojas, indicativas de presencia de un objeto, con el envío de señales de radiofrecuencia que contienen identificación de la baliza, asegurando de esta forma la detección de los objetos.
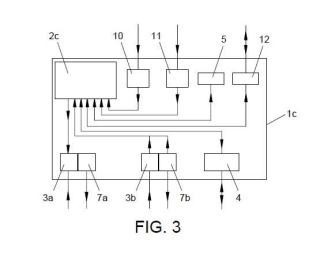
El sistema comprende tres tipos de balizas, una (1a) configurada para zonas de peligro, en las que al recibirse una señal infrarroja responde emitiendo una señal de radiofrecuencia para indicar su presencia. Otra baliza (1b) de operarios, que además genera una indicación al operario de qué objeto es el detectado en el área de cobertura. Y una baliza (1c) de vehículo en la que se emiten y reciben señales infrarrojas y de radiofrecuencia para detectar la proximidad de otros objetos en el área de cobertura.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201231299.
Solicitante: HERRERO DESARROLLO DE SISTEMAS, S.L.
Nacionalidad solicitante: España.
Inventor/es: MARTINEZ DOMINGUEZ,JOSE ANTONIO, HERRERO PUERTAS,JOSE ANTONIO, HERRERO PUERTAS,OSCAR.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G08G1/16 FISICA. › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › Sistemas anticolisión.
Fragmento de la descripción:
OBJETO DE LA INVENCiÓN
La invención se refiere a un método y a un sistema previstos para realizar señalizar y detectar la proximidad entre objetos desplazables en un área de cobertura, para lo que se prevé que los diferentes objetos comprendan balizas de generación de señales y balizas de recepción de las señales generadas por las balizas de otros objetos que se encuentren en el área de cobertura; y que tiene por objeto aumentar la velocidad y la fiabilidad de la detección, para lo que las balizas combinan el uso de señalización infrarroja con comunicación via radio.
Es otro objeto de la invención el proporcionar diferentes tipos de balizas en función del objeto a detectar del área de cobertura, como pueden ser máquinas o vehiculos en movimiento, operarios o peatones y zonas de control de paso, como pueden ser zonas de peligro.
También es objeto de la invención el detectar si los objetos se alejan o acercan entre si, de fonna que en caso de detectarse que se acerquen, y al menos uno de los objetos sea un vehiculo se actúa sobre su velocidad reduciéndola para reducir el riesgo de accidentes. Una vez que se detecta que los objetos se alejan, se restablece la velocidad a la que circulaba el vehiculo cuando inició la reducción de velocidad.
ANTECEDENTES DE LA INVENCiÓN
En la actualidad existen multitud de entomos en los que las máqUinas conviven con los operarios en una determinada zona de trabajo, tales como industrias, obras públicas, almacenes logísticos, mercados, etc. Esta circunstancia detennina que el riesgo de accidentes sea muy elevado. Asi, se da la circunstancia de que los atropellos por máquinas en movimiento son la primera causa de accidentes laborales, por lo que en la actualidad se utilizan diferentes métodos y sistemas para reducir estos accidentes.
En este sentido puede señalarse el uso de avisadores acústicos, combinados con el uso de avisadores 25 luminosos de marcha, asi como el empleo de chalecos reflectantes.
Además, en la actualidad se utilizan métodos y sistemas basados en identificación por radiofrecuencia (RFID) , (Radiofrecuency Identification) , que presentan el inconveniente de que la distancia de detección, por el empleo de la radiofrecuencia, sufre muchas variaciones con respecto al tipo de máquina, el entomo de trabajo, posición de los sensores, velocidad de la máqUina, etc., por lo que este tipo de sistemas no proporcionan la seguridad necesaria para evitar los accidentes, al no proporcionar fiabilidad en la detección.
Por ello también se han creado otro tipo de métodos y sistemas que se emplean GPS (Global Positions System) , los cuales tienen una precisión que depende directamente del número de satélites, pudiendo originar errores en la precisión de esta decenas de metros, y además tienen el inconveniente de que únicamente se pueden utilizar al aire libre Adicionalmente se da la circunstancia de que en la operativa con las máquinas, existe el problema de que en ocasiones transportan una carga que limita el radio de visión de los conductores, por lo que necesitan sistemas de ayuda externa que avisen de la proximidad de otras máqU inas, operarios o zonas de riesgo.
Como problema añadido, además se da la circunstancia de que los entomos descritos, en muchas ocasiones tienen altos niveles de ru ido, con lo que los avisadores acústicos pierden su eficacia al no avisar a los 40 conductores y peatones de fonna eficaz evitando que dicho aviso se vea afectado por el ruido ambiental.
DESCRIPCiÓN DE LA INVENCiÓN
La presente invención busca resolver todos los inconvenientes expuestos anteriormente de un modo fiable y repercutiendo de manera minima en la productividad del área de cobertura.
Para ello la invención ha desarrollado un nuevo método de detección de proximidad entre objetos 45 desplazables en una área de cobertura, en el que los diferentes objetos están dotados de balizas de generación de señales y de recepción de señales generadas por balizas de otros objetos que se encuentren en el área de cobertura, y que se caracteriza por que comprende genera señales infrarrOjas, mediante una primera baliza de un primer objeto, de señalización de presencia de dicho primer objeto en el área de cobertura, y seguidamente se activa un emisorfreceptor de radiofrecuencia de dicha primera baliza y genera 50 una señal de radiofrecuencia que contiene infonnación de identificación del primer objeto, de manera que las señales infrarrojas de señalización de presencia del primer objeto, se reciben en una segunda baliza, prevista en un segundo objeto, de modo que esta recepción produce la activación en la segunda baliza de un receptor
de radiofrecuencia, incorporado en esta segunda baliza, cuya activación permite efectuar la detección de la señal de radiofrecuencia de la primera baliza y por tanto permite efectuar la identificación del primer objeto, a partir de la señal de radiofrecuencia detectada. A continuación se genera en la segunda baliza al menos una respuesta de radiofrecuencia que contiene información de identificación de dicho segundo objeto, y que 5 además contiene información de identificación de la primera baliza, de manera que en dicha información de identificación de dicho segundo objeto únicamente se recibe en dicha primera bal iza, en la que a partir de dicha información de identificación de dicho segundo objeto, se permite identificar dicho segundo objeto. A continuación se genera en la primera baliza una indicación al primer objeto de que se ha detectado la presencia de un segundo objeto en el área de cobertura, de manera que el primer objeto sabe de la existencia de un segundo objeto en el área de cobertura , siendo, por tanto alertado para que extreme la precaución y asi reducir el riesgo de colisión entre el primer y segundo objeto.
En una realización de la invención se prevé que el primer objeto sea un vehiculo, como por ejemplo una máquina desplazable, y el segundo objeto pueda ser un peatón, como por ejemplo un operario, o una zona de peligro, con lo que con el método descrito el conductor del vehículo es avisado de la presencia de un peatón o de una zona de peligro, poniéndole en sobre aviso de esta circunstancia, con la consiguiente ventaja de mejora de la seguridad que ello representa.
En otra realización el primer y segundo objeto son vehículos, en cuyo caso, cuando la segunda baliza del segundo objeto identifica el primer objeto a partir de la señal de radiofrecuencia detectada, dicha segunda baliza del segundo objeto, o segunda vehículo, tal y como fue descrito anteriormente, genera una respuesta 20 de radiofrecuencia que contienen los datos de identificación del segundo vehículo y la información de identificación del primer vehículo, de forma que estas señales se reciben en la primera baliza del primer vehículo que identifica el segundo objeto, generando la segunda baliza del segundo vehiculo una indicación al conductor de la presencia de un primer vehículo del área de cobertura, de forma que ambos conductores del primer y segundo vehículo conocen la existencia del otro vehículo en el área de cobertura,
manteniéndoles en alerta frente a posibles colisiones.
Cabe señalar que la realización en la que el primer objeto es un vehículo y el segundo objeto puede ser un peatón o una zona de peligro, tras la identificación del segundo objeto (peatón o zona de peligro) por parte de la primera baliza de dicho primer objeto (vehiculo) , además comprende efectuar la detección de si el vehículo se aleja o acerca al peatón o zona de peligro, de forma que en caso de que se acerque se baja automáticamente la velocidad del vehículo, reduciéndose el riesgo de colisión En el caso en el que el primer objeto sea un vehiculo y el segundo objeto sea un peatón, una vez que se ha efectuado la identificación del primer objeto, por parte de la segunda baliza del segundo objeto (peatón) , comprende generar en dicha segunda baliza una indicación al peatón de la presencia del vehículo en el área de cobertura, quedando por tanto en este caso, tanto el conductor del vehículo como el peatón avisados de que ambos se encuentran en el área de cobertu ra.
El método de la invención también prevé que cuando ambos objetos sean vehículos, y la primera baliza haya generado una indicación a dicho primer objeto de la presencia de un segundo objeto, y la segunda baliza ha generado una indicación a dicho segundo objeto de presencia de un primer objeto, es decir el conductor del primer vehiculo ha sido avisado de la presencia del segundo vehículo y el conductor del segundo vehiculo ha sido avisado de la presencia del primer vehículo, se prevé que se efectúe la detección de si el primer y el segundo objeto se alejan...
Reivindicaciones:
1. MÉTODO DE DETECCiÓN DE PROXIMIDAD ENTRE OBJETOS DESPlAZABlES EN UN AREA DE COBERTURA, en el que los diferentes objetos comprenden balizas de generación de señales y de recepción de las señales generadas por balizas de otros objetos que se encuentren en el área de cobertura; caracterizado por que comprende:
-Genera señales infrarrojas, mediante una primera baliza de un primer objeto, de señalización de 10 presencia de dicho primer objeto en el área de cobertura, y seguidamente
-Activar un emisor receptor de radiofrecuencia de dicha primera baliza, y generar una señal de radiofrecuencia que contiene información e identificación del primer objeto
-Recibir en una segunda baliza de un segundo objeto las señales infrarrojas de señalización de presencia del primer objeto,
- Activar en la segunda baliza un receptor de radiofrecuencia para detectar la señal de radiofrecuencia de la primera baliza e identificar el primer objeto, a partir de la señal de radiofrecuencia detectada,
Generar en la segunda baliza al menos una respuesta de radiofrecuencia que contiene información de identificación de dicho segundo objeto, y que además contiene información de identificación de la primera baliza, para que dicha información de identificación de dicho segundo objeto sea recibida exclusivamente por dicha primera baliza,
Recibir la primera baliza la información de identificación de dicho segundo objeto, e identificar dicho segundo objeto,
Generar en la primera baliza una indicación al primer objeto de presencia de un segundo objeto en el área de cobertura 2. MÉTODO DE DETECCiÓN DE PROXIMIDAD ENTRE OBJETOS DESPLAZABLES EN UN AREA DE COBERTURA, según reivindicación 1, caracterizado porque el primer objeto es un vehículo y el segundo objeto esta seleccionado entre un peatón y una zona de peligro 3. MÉTODO DE DETECCiÓN DE PROXIMIDAD ENTRE OBJETOS DESPLAZABLES EN UN AREA DE COBERTURA, según reivindicación 1, caracterizado porque el primer y segundo objetos son vehículos, en cuyo caso cuando la segunda baliza del segundo objeto identifica el primer objeto a partir de la señal de radiofrecuencia detectada, dicha segunda baliza genera una señal de radiofrecuencia que contiene información de identificación del segundo objeto, generando la primera baliza una indicación al primer objeto de presencia de un segundo objeto en el área de cobertura.
4. MÉTODO DE DETECCiÓN DE PROXIMIDAD ENTRE OBJETOS DESPLAZABLES EN UN AREA DE
COBERTURA, según reivindicación 2, caracterizado porque cuando el primer objeto es un vehículo y el segundo objeto es un objeto seleccionado entre un peatón y una zona de peligro, tras la identificación del segundo objeto por parte de una primera baliza de dicho primer objeto, además comprende detectar si dicho primer objeto se aleja o acerca al segundo objeto, y en caso de que se acerque ademas comprende bajar automáticamente la velocidad del primer objeto 5. MÉTODO DE DETECCiÓN DE PROXIMIDAD ENTRE OBJETOS DESPlAZABlES EN UN AREA DE COBERTURA, según reivindicación 4, caracterizado porque cuando el primer objeto es un vehículo y el segundo objeto es un peatón, tras la identificación del primer objeto, por parte de la segunda baliza del segundo objeto, comprende generar en dicha segunda baliza una indicación al segundo objeto de presencia del primer objeto en el area de cobertura 45 6. MÉTODO DE DETECCiÓN DE PROXIMIDAD ENTRE OBJETOS DESPLAZABLES EN UN AREA DE COBERTURA, según reivind icación 3, caracterizado porque cuando el primer y segundo objetos son vehículos y la primera baliza ha generado una indicación a dicho primer objeto de presencia de un segundo objeto, y la segunda baliza ha generado una indicación a dicho segundo objeto de presencia de un primer objeto, comprende detectar si el primer y segundo objetos se alejan o se acercan entre si. para que en caso 50 de se acerquen, además, comprende bajar automaticamente la velocidad de un vehículo seleccionado entre el primer objeto, segundo objeto y combinación de ambos 7. MÉTODO DE DETECCiÓN DE PROXIMIDAD ENTRE OBJETOS DESPlAZABlES EN UN AREA DE COBERTURA, según reivindicaciones 4 ó 6, caracterizado porque la detección de acercamiento o alejamiento del primer objeto al segundo objeto comprende 55 -Emitir y recibir señales infrarrojas por la zona delantera y trasera del primer objeto, donde las emisiones delantera y trasera se realiza de forma alterna,
Detectar qué emisión infrarroja de la parte delantera o trasera obtiene una respuesta de rad iofrecuencia de las bal izas de los objetos situados en su área de cobertura , Detectar el sentido de marcha de avance o retroceso del primer objeto,
Verificar si el sentido de marcha coincide con la zona que obtiene una respuesta de radiofrecuencia,
yen caso afirmativo establecer que el primer objeto se acerca al segundo objeto; y donde la detección de acercamiento o alejamiento del segundo objeto al primer objeto comprende la realización de las fases anteriores por parte de la baliza del segundo objeto.
8. MÉTODO DE DETECCiÓN DE PROXIMIDAD ENTRE OBJETOS DESPLAZABLES EN UN ÁREA DE
COBERTURA, según reivindicaciones 4, 6 ó 7, caracterizado por que en caso de haberse reducido la velocidad de un objeto, y con posterioridad su baliza detecte que se aleja del objeto que produjo su reducción de velocidad, comprende restablecer la velocidad a la que circulaba cuando inició la reducción de velocidad.
9. MÉTODO DE DETECCiÓN DE PROXIMIDAD ENTRE OBJETOS DESPLAZABLES EN UN ÁREA DE COBERTURA, según reivindicaciones 4, 6 ó 7, caracterizado por que comprende variar el alcance del área de cobertura infrarroja de un objeto en función de su velocidad de desplazamiento, mediante la aplicación a los emisores infrarrojos, de los pulsos generados por un velocímetro de un objeto correspondiente a un vehículo, proporcionando una mayor potencia de alimentación a los infrarrojos a mayor velocidad.
10. SISTEMA DE DETECCiÓN DE PROXIMIDAD ENTRE OBJETOS DESPLAZABLES EN UN ÁREA DE COBERTURA, en el que los diferentes objetos comprenden balizas de generación de señales y de recepción 20 de señales generadas por balizas de otros objetos que se encuentren en el área de cobertura; de acuerdo con el procedimiento de las reivindicaciones 1 a 9, caracterizado por que las balizas comprenden:
Al menos un receptor de señales infrarrojas, para la recepción de señales infrarrojas generadas por otra baliza de señalización de la presencia de dicha otra baliza,
Un emisor/receptor de rad iofrecuencia, y
Un circuito de control configurado para:
-gobernar que el emisor de radiofrecuencia emita una señal que contiene información de identificación del objeto en el que está instalada la baliza,
-activar el receptor de radiofrecuencia al detectar señales infrarrojas procedentes de otra baliza, permitiendo la recepción de señales de radiofrecuencia,
identificar el objeto del que recibió una señal de radiofrecuencia a partir de la información de identificación recibida.
. SISTEMA DE DETECCiÓN DE PROXIMIDAD ENTRE OBJETOS DESPLAZABLES EN UN ÁREA DE COBERTURA, según reivindicación 10, caracterizado por que la baliza comprende un avisador seleccionado entre óptico, acústico de vibración y una combinación de los anteriores; que es activado por el circuito de control para identificar al objeto portador de la baliza cuando ha identificado a otro objeto en el área de cobertura.
12. SISTEMA DE DETECCiÓN DE PROXIMIDAD ENTRE OBJETOS DESPLAZABLES EN UN ÁREA DE COBERTURA, según reivindicación 10, caracterizado por que la baliza comprende al menos un emisor de señales infrarrojas de señalización de presencia del objeto portador de la baliza en el área de cobertura.
13. SISTEMA DE DETECCiÓN DE PROXIMIDAD ENTRE OBJETOS DESPLAZABLES EN UN ÁREA DE COBERTURA, según reivindicación 12, caracterizad por que las balizas además comprenden:
Al menos un em isor receptor de señales ínfrarrojas orientado hacia la parte posterior del objeto, para señalizar su presencia por la parte trasera y detectar presencia de objetos en dicha parte trasera de dicho objeto,
Al menos un emisorlreceptor de señales infrarrojas orientado hacia la parte anterior del objeto, para señalizar su presencia por la parte delantera y detectar presencia de objetos en dicha parte delantera de dicho objeto,
Un módulo de captación de la velocidad del objeto que recibe los pulsos de un velocímetro previsto en el objeto.
Un módulo de detección del sentido de marcha de avance o retroceso del objeto;
Un módulo de comunicaciones con dispositivos extemos al sistema;
todos ellos conectados al circu ito de control que además está configurado para :
Detectar si el sentido de la marcha del objeto se dirige hacia otro objeto, verificando si el sentido de 5 la marcha se corresponde con la zona del objeto que está reaccionando ante las señales infrarrojas delantera o trasera emitidas,
Detectar si el sentido de la marcha del objeto se aleja hacia otro objeto verificándose si el sentido de la marcha no se corresponde con la zona del objeto que está reaccionando ante las señales infrarrojas emitidas,
Generar una señal de reducción de velocidad del objeto cuando se ha detectado que el objeto se dirige hacia otro objeto, que se aplica sobre el captador de velocidad, y generar una señal de restablecimiento de la velocidad del objeto cuando se detecta que la marcha del vehículo se aleja de otro objeto, que se aplica sobre el captador de velocidad.
14. SISTEMA DE DETECCiÓN DE PROXIMIDAD ENTRE OBJETOS DESPLAZABLES EN UN ÁREA DE 15 COBERTURA, según reivindicación 13, caracterizado por que comprende dos emisores/receptores de señales infrarrojas delanteros; uno derecho y otro izquierdo.
15. SISTEMA DE DETECCiÓN DE PROXIMIDAD ENTRE OBJETOS DESPLAZABLES EN UN ÁREA DE COBERTURA, según reivindicación 12, caracterizado por que el circuito de control está configurado para aplicar a los emisores infrarrojos los pulsos de velocimetro del objeto, regulando su potencia de emisión en función de la velocidad del objeto.
Patentes similares o relacionadas:
DISPOSITIVO LUMÍNICO ACÚSTICO DE EMERGENCIA Y ALERTA TEMPRANA, del 30 de Julio de 2020, de CALOMARDE LORENTE, Daniel: Dispositivo lumínico acústico de emergencia y alerta temprana consistente en un conjunto de elementos destinados a informar en alerta temprana […]
Sistema anti acoso y anti colisión trasero para vehículos motorizados, del 20 de Julio de 2020, de ARBEX CALLES, Juan Ignacio: El sistema anti acoso y anti colisión trasero para vehículos motorizados, pretende disuadir, educar y si fuera necesario facilitar la identificación del infractor, […]
Procedimiento y sistema de aviso de colisión para la detección de vehículos en dirección contraria, del 24 de Junio de 2020, de Siemens Mobility GmbH: Procedimiento para la detección de vehículos de transporte en dirección contraria en un sistema de transporte con rutas fijas, que presenta las […]
Sistema de visualización de un vehículo, del 24 de Junio de 2020, de LEIA INC: Un sistema de vigilancia de vehículos que comprende: un escáner tridimensional 3D, configurado para escanear una región adyacente […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
MÉTODO Y SISTEMA PARA CONTROLAR UNA PLURALIDAD DE VEHÍCULOS AUTÓNOMOS, del 11 de Junio de 2020, de SEAT, S.A.: La presente invención se refiere a un método para controlar una pluralidad de vehículos autónomos, donde el método comprende las etapas de determinar una situación […]
DISPOSITIVO ELECTRÓNICO DE SEGURIDAD, del 20 de Marzo de 2020, de PETRONICS TECNOLOGIA S.L: Dispositivo electrónico de seguridad independiente del vehículo apto para ser fijado al vehículo que comprende una cámara de video que grava en continuo […]
Caracterización de una colisión de vehículo, del 8 de Enero de 2020, de GEOTAB Inc: En el presente documento se describen ejemplos de un sistema que procesa información que describe el movimiento de un vehículo en un momento relacionado con una posible […]