Mejora en la localización de aeronaves mediante un radar primario por la explotación de un radar secundario en modo S.
Procedimiento para determinar el error que afecta a la determinación de la posición de aeronaves en vuelo,
realizado a partir de los ecos radares retrodifundidos por estas aeronaves, caracterizado porque comprendeprincipalmente:
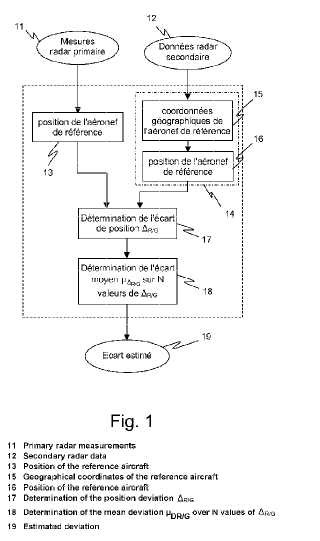
- una primera etapa (14) de interrogación de una aeronave de referencia durante la cual esta aeronavetransmite su posición geográfica y su altitud; eligiéndose la aeronave de referencia de entre aquellas cuyaposición puede ser calculada a partir de su eco radar y que están equipadas con un transpondedor capaz deintercambiar informaciones en modo S con un radar secundario y de transmitir su posición geográfica y sualtitud a través de dicho canal;
- una segunda etapa (13) de determinación de la posición de la aeronave de referencia a partir de lasmediciones realizadas sobre el eco radar retrodifundido por esta aeronave;
- una tercera etapa (17) de determinación de la desviación ΔR/G entre la posición proporcionada por la aeronavede referencia en un instante dado y la posición de esta aeronave determinada para el mismo instante, a partirde las mediciones de radar realizadas sobre los ecos retrodifundidos por esta aeronave;
- una cuarta etapa (18) durante la cual se determina una desviación media μR/G definida por:
en la que:
- μR/G (n) representa la desviación media calculada en la iteración actual,
- μR/G (n-1) representa la desviación media calculada en la iteración precedente,
- ΔR/G (n) representa la desviación calculada en la iteración actual,
representando K un factor de integración dado.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/060055.
Solicitante: THALES.
Nacionalidad solicitante: Francia.
Dirección: 45, RUE DE VILLIERS 92200 NEUILLY-SUR-SEINE FRANCIA.
Inventor/es: ROGER,LAURENT.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S13/78 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › discriminando entre diferentes clases de blancos, p. ej. identificación amigo-enemigo (radar-IFF) (G01S 13/75, G01S 13/79 tiene prioridad).
- G01S13/87 G01S 13/00 […] › Combinaciones de sistemas de radar, p. ej. radar primario y radar secundario.
- G01S7/40 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › Medios para monitorización o calibración.
PDF original: ES-2428333_T3.pdf
Fragmento de la descripción:
Mejora en la localización de aeronaves mediante un radar primario por la explotación de un radar secundario en modo S
La invención concierne al ámbito general de la vigilancia aérea. Más particularmente, concierte al ámbito de la localización de aeronaves por radar.
En materia de vigilancia aérea se sabe cómo efectuar la localización de aeronaves utilizando las mediciones proporcionadas por un sistema de radar primario. Dicho sistema permite, en efecto, localizar una aeronave sin que ésta esté activamente asociada a esta localización. El radar primario efectúa esta localización utilizando la señal correspondiente al eco retrodifundido por la aeronave. A partir de este eco es, en efecto, teóricamente posible determinar con precisión, mediante diversos medios conocidos, la distancia que separa a la aeronave del radar, así como el rumbo de llegada en situación y la demora del eco reflejado por la aeronave. La detección de ecos mediante un radar da lugar, de forma conocida, a la creación de unos bloques que representan la asociación de los diferentes ecos recibidos y atribuidos a una misma aeronave en función de diversos criterios, particularmente de criterios de posición y de fecha. Por consiguiente, tras la confirmación de verosimilitud, un bloque da lugar a la creación de una pista, o incluso es integrado en una pista existente. Una pista constituye en la práctica la huella dejada por una aeronave cuando atraviesa el espacio observado por el radar.
No obstante, la precisión de las mediciones realizadas por el radar es función de los datos aleatorios, tales como la proporción entre la señal y el ruido (S/B) , del eco recibido. Igualmente es función de la precisión de funcionamiento de ciertos elementos del radar, tales como los relojes. Además es función de los diversos sesgos relacionados con la realización del radar, tales como, por ejemplo, los sesgos de alineación del eje radioeléctrico sobre el eje de la antena.
Excepto algunos sesgos bien identificados, compensados sistemáticamente al poner en funcionamiento el radar, las demás causas de alteraciones en la precisión son difícilmente cuantificables y manejables, ya que además la precisión requerida es importante, del orden de 0, 3° para la medición del azimut, por ejemplo.
Una solución para incrementar la precisión de las mediciones consiste en tratar por separado las diferentes causas. Así, diversos sesgos mecánicos (antena, dirección...) se miden por separado en fábrica, mientras que otros parámetros, tales como los ángulos de caída y de alabeo (es decir, los dos ángulos de inclinación del conjunto de radar con respecto a una dirección de referencia dada) , se miden en estática al colocar el radar en su lugar de utilización. Generalmente dan lugar a la determinación, mediante cálculo, de un sesgo acumulado que es memorizado como parámetro de corrección.
Paralelamente, los diversos elementos del radar que representan fuentes potenciales de una alteración en la precisión de las mediciones, son el objeto de una concepción y una realización más elaborada, de forma que se alcance la precisión obtenida y se limiten las desviaciones en el transcurso del tiempo.
No obstante, esta solución produce unos efectos limitados en la práctica, en la medida en que los sesgos son conocidos por sí mismos con una cierta incertidumbre, y eso media aritmética no se corresponde necesariamente con el sesgo real resultante que distorsiona la medición. Por otro lado, la puesta en práctica de los componentes de gran precisión se traduce en una mejora sustancial de la complejidad y del coste de realización del radar utilizado. Además, dicha solución solamente permite proceder a una compensación a priori, a partir de la estimación de un sesgo global en un instante lado, sesgo global cuyo valor es susceptible de variar con el transcurso del tiempo en función de las condiciones exteriores.
Un objeto de la invención es proponer una solución simple que permita mejorar la precisión de la localización de una aeronave cualquiera mediante un radar primario, determinando el error cometido por el radar sobre la determinación de la posición de esta aeronave, error que halla su origen en las mediciones realizadas sobre el eco retrodifundido por este último. Otro objeto es permitir una corrección en tiempo real de la determinación de la posición de esta aeronave.
A este efecto, la invención tiene por objeto un procedimiento para determinar el error que afecta a la determinación de la posición de aeronaves en vuelo, realizada a partir de los ecos radares retrodifundidos por estas aeronaves. Este procedimiento comprende principalmente:
-una primera etapa de interrogación de una aeronave de referencia durante la cual esta aeronave transmite su
posición geográfica y su altitud; -la aeronave de referencia se elige de entre aquellas cuya posición puede ser calculada a partir de su eco radar
y que están equipadas con un transpondedor capaz de intercambiar la información en modo S con un radar
secundario y transmitir su posición geográfica y su altitud a través de dicho canal; -una segunda etapa de determinación de la posición de la aeronave de referencia a partir de las mediciones realizadas sobre el eco radar retrodifundido por esta aeronave; -una tercera etapa de determinación de la desviación ΔR/G entre la posición proporcionada por la aeronave de referencia en un instante dado y la posición de esta aeronave determinada, para el mismo instante, a partir de las mediciones de radar realizadas por los ecos retrodifundidos por esta aeronave; -una cuarta etapa durante la cual se calcula una desviación media μΔR/G definida por:
en la que:
-μΔR/G (n) representa la desviación media calculada en la iteración actual,
-μΔR/G (n-1) representa la desviación media calculada en la iteración precedente,
-ΔR/G (n) representa la desviación calculada en la iteración actual,
representando K un factor de integración dado.
Según la invención, la primera etapa comprende una operación de validación de la información de la posición geográfica transmitida por la aeronave de referencia, repitiéndose esta operación siempre que la información de la posición transmitida no sea validada.
Según la invención, cuando la información de la posición geográfica es validada, las coordenadas geográficas (latitud, longitud) y la altitud, extraídas de la información de la posición, son convertidas en coordenadas expresadas en la orientación (distancia, situación, demora) del radar.
Según un modo de realización preferido, la tercera etapa comprende una operación previa de prueba de la verosimilitud de la posición extraída a partir de la información de posición.
La invención tiene igualmente por objeto una aplicación del procedimiento según la invención para corregir en tiempo real el cálculo de la posición de una aeronave cualquiera efectuado a partir de las mediciones realizadas sobre el eco radar retrodifundido por ésta en el instante t considerado. Esta aplicación comprende:
-una etapa de determinación de la posición de la aeronave a partir de las mediciones realizadas sobre el eco
radar primario correspondiente a dicha aeronave; -una etapa de corrección de la medición, que se efectúa teniendo en cuenta la última desviación de la posición media de fecha μΔR/G y sustrayéndola de la medición; siendo determinada la desviación μΔR/G por la puesta en práctica del procedimiento según la invención.
La invención tiene igualmente por objeto una aplicación del procedimiento según la invención para realizar una calibración periódica de las mediciones de la posición efectuadas a partir de un radar primario. Esta aplicación consiste en poner en práctica el procedimiento según la invención y registrar de forma simultánea la posición geográfica de una aeronave de referencia, así como la posición de la misma aeronave de referencia determinada para el mismo instante por el radar primario. Una desviación en la posición media μΔR/G se calcula a partir de los datos registrados y se utiliza como estimación del sesgo de medición presentado por el radar primario.
Las características y las ventajas de la invención se apreciarán mejor gracias a la descripción que sigue, descripción que expone la invención apoyándose en las figuras anexas, que representan:
la figura 1, un organigrama de principio de las etapas principales del procedimiento según la invención;
la figura 2, un organigrama de principio de una aplicación característica del procedimiento según la invención.... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para determinar el error que afecta a la determinación de la posición de aeronaves en vuelo, realizado a partir de los ecos radares retrodifundidos por estas aeronaves, caracterizado porque comprende principalmente:
- una primera etapa (14) de interrogación de una aeronave de referencia durante la cual esta aeronave transmite su posición geográfica y su altitud; eligiéndose la aeronave de referencia de entre aquellas cuya posición puede ser calculada a partir de su eco radar y que están equipadas con un transpondedor capaz de intercambiar informaciones en modo S con un radar secundario y de transmitir su posición geográfica y su altitud a través de dicho canal;
- una segunda etapa (13) de determinación de la posición de la aeronave de referencia a partir de las mediciones realizadas sobre el eco radar retrodifundido por esta aeronave;
- una tercera etapa (17) de determinación de la desviación ΔR/G entre la posición proporcionada por la aeronave de referencia en un instante dado y la posición de esta aeronave determinada para el mismo instante, a partir de las mediciones de radar realizadas sobre los ecos retrodifundidos por esta aeronave;
- una cuarta etapa (18) durante la cual se determina una desviación media μΔR/G definida por:
en la que:
-μΔR/G (n) representa la desviación media calculada en la iteración actual,
-μΔR/G (n-1) representa la desviación media calculada en la iteración precedente.
20. ΔR/G (n) representa la desviación calculada en la iteración actual,
representando K un factor de integración dado.
2. Procedimiento según la reivindicación 1, caracterizado porque la primera etapa comprende una operación de validación de la información de la posición geográfica transmitida por la aeronave de referencia, repitiéndose esta operación siempre que la información de la posición transmitida no sea validada.
3. Procedimiento según la reivindicación 2, caracterizado porque cuando la información de la posición geográfica es validada, las coordenadas geográficas (latitud, longitud) y de altitud, extraídas a partir de la información de la posición son convertidas (16) en coordenadas expresadas en orientación (distancia, situación, demora) del radar.
4. Procedimiento según una cualquiera de las reivindicaciones 1 a 3, caracterizado porque la tercera etapa (17)
comprende una operación previa de prueba de la verosimilitud de la posición extraída a partir de la información de 30 posición.
5. Utilización del procedimiento según una cualquiera de las reivindicaciones precedentes para corregir en tiempo real el cálculo de la posición de una aeronave cualquiera efectuado a partir de las mediciones realizadas sobre el eco radar retrodifundido por ésta en el instante t considerado, caracterizado porque comprende:
- una etapa (21) de determinación de la posición de la aeronave a partir de las mediciones (11) realizadas 35 sobre el eco radar primario correspondiente a esta aeronave;
- una etapa (22) de corrección de la medición, efectuada teniendo en cuenta la última desviación de la posición media en fecha μΔR/G (19) y restándosela a la medición
6. Procedimiento para realizar una calibración periódica de las mediciones de posición (21) efectuadas a partir de un radar primario, caracterizado porque consiste en poner en práctica el procedimiento según una de las reivindicaciones 1 a 4 y registrar de forma simultánea la posición geográfica de una aeronave de referencia, así como la posición de la misma aeronave de referencia determinada para el mismo instante por el radar primario; calculándose una desviación de la posición media μΔR/G a partir de los datos registrados y utilizándose como estimación del sesgo de medición presentado por el radar primario.
Patentes similares o relacionadas:
Dispositivo de procesamiento de imagen y procedimiento de procesamiento de imagen correspondiente, del 12 de Febrero de 2020, de Microwave Characterization Center: Dispositivo de procesamiento de imagen caracterizado porque comprende: - un primer conjunto de sensores de hiperfrecuencias, con preferencia radiométricos, estando […]
Geolocalización tridimensional automática de objetivos de SAR y estimación simultánea de retardos de propagación troposférica usando dos imágenes de SAR de apertura larga, del 20 de Noviembre de 2019, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Método para la geolocalización tridimensional automática de objetivos de SAR y estimación simultánea de retardos de propagación troposférica […]
 Medida de calidad de conjunto de frecuencias, del 30 de Octubre de 2019, de Weibel Scientific A/S: Un método para generar una medida de calidad para un conjunto de frecuencias para indicar la calidad de dicho conjunto de frecuencias para […]
Medida de calidad de conjunto de frecuencias, del 30 de Octubre de 2019, de Weibel Scientific A/S: Un método para generar una medida de calidad para un conjunto de frecuencias para indicar la calidad de dicho conjunto de frecuencias para […]
Procedimiento para determinar una disposición de al menos dos sensores y red de sensores, del 2 de Octubre de 2019, de Siemens Mobility GmbH: Procedimiento para determinar una disposición de al menos dos sensores entre sí, en el que se detecta un objeto en movimiento por medio de […]
Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado y vehículo motorizado, del 31 de Julio de 2019, de AUDI AG: Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado durante su operación, en donde los datos sensoriales registrados por […]
Radar meteorológico, del 10 de Julio de 2019, de LEONARDO Germany GmbH: Radar meteorológico para medir señales de radar en el rango de GHz con un receptor que contiene al menos una ruta de señal , y que comprende un […]
Linealizador de forma de onda, del 12 de Junio de 2019, de MBDA UK LIMITED: Una fuente de barrido de frecuencia para un radar FMCW que comprende un sintetizador de frecuencia de bucle de bloqueo de fase, incluyendo el bucle bloqueado […]
Procedimiento de localización de un blanco y sistema radar multiestático de implementación de tal procedimiento, del 14 de Marzo de 2019, de THALES: Procedimiento de localización de un blanco que incluye las siguientes etapas: a) recibir, por medio de N≥1 receptores (RR1, RR2, RR3), […]