GRUPO DE DIRECCION Y DE SUSPENSION PARA EL TREN DELANTERO DE UN VEHICULO DE DOS RUEDAS.
Grupo de dirección y de suspensión para el tren delantero de un vehículo de dos ruedas,
que comprende: manillar; amortiguador ascendente; buje de rueda delantera con dispositivo de CHS; eje delantero ascendente con tramo de adaptación de eje descentrado; basculante inferior y basculante superior esencialmente horizontales, formando con dicho eje delantero una unidad basculante; árbol de dirección solidarizado por su extremo inferior a dicho dispositivo de CHS y por su extremo superior a dicho manillar, articulado al chasis, con una parte superior dividida en al menos dos porciones y una parte inferior con tramo de adaptación de árbol descentrado cuyo descentramiento es menor que el descentramiento de dicho tramo de adaptación de eje; teniendo dicho eje delantero agujeros pasantes superior e inferior por los cuales se extiende dicho árbol de dirección, y asiento adyacente a su extremo inferior, en el que está recibido el extremo inferior de dicho eje delantero
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200802698.
Solicitante: ARCO DESIGN AND PROJECTS, S.L.
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: BELTRAN CARRION,CARLOS, GONZALEZ DE CHAVES FERNANDEZ,PABLO, GARCIA-MONZON ALONSO,ROBERTO.
Fecha de Solicitud: 23 de Septiembre de 2008.
Fecha de Publicación: .
Fecha de Concesión: 20 de Diciembre de 2010.
Clasificación Internacional de Patentes:
- B62K21/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62K CICLOS; CUADROS PARA CICLOS; DISPOSITIVOS DE DIRECCION; MANDOS ACCIONADOS POR EL CONDUCTOR ADAPTADOS ESPECIALMENTE A LOS CICLOS; SUSPENSION DE CUBOS DE RUEDAS DE CICLOS; SIDECARS, REMOLQUES DELANTEROS O VEHICULOS ADICIONALES SIMILARES PARA CICLOS. › Elementos de la dirección (elementos de la dirección adaptados especialmente a un tipo especial de ciclo especificado en los grupos B62K 1/00 - B62K 17/00, ver el grupo apropiado).
- B62K25/00 B62K […] › Suspensión de cubos de ruedas (para vehículos en general B60G).
Clasificación PCT:
Fragmento de la descripción:
Grupo de dirección y de suspensión para el tren delantero de un vehículo de dos ruedas.
Campo de la invención
La presente invención se refiere a un grupo de dirección y de suspensión para el tren delantero de un vehículo de dos ruedas.
Aquí en lo sucesivo, por simplificar, se hará referencia simplemente a una motocicleta como vehículo apropiado para la presente invención, aunque esta referencia no se debe entender limitativa de ningún modo, pues la presente invención se puede aplicar igualmente a otros tipos similares de vehículo, tal como bicicletas, ciclomotores, etc.
Antecedentes de la invención
Es conocido que, en su configuración más básica, una bicicleta incluye un chasis (o cuadro) que comprende un tubo delantero, esencialmente vertical, por el que discurre un eje delantero enterizo que une un manillar y el centro de la rueda delantera, pudiendo dicho eje delantero deslizarse giratoriamente dentro de dicho tubo delantero del chasis para posibilitar la acción de dirección pero no pudiendo dicho eje delantero deslizarse axialmente dentro de dicho tubo delantero para proporcionar la acción de suspensión.
Sin embargo, en las motocicletas se proporciona un grupo de dirección y de suspensión.
Tradicionalmente, dicho grupo comprende un eje delantero que une el manillar y el centro de la rueda delantera, que está formado convencionalmente por varias barras posicionadas por tijas, que está situado en el plano central de la motocicleta (plano de simetría), y que es ascendente y está ligeramente inclinado hacia atrás formando un ángulo con la vertical (ángulo de lanzamiento) que genera un par autoalineante.
Dicho eje delantero está unido a pivote al chasis para posibilitar la acción de dirección y es telescópico para posibilitar la acción de suspensión.
Dicho par autoalineante, y consiguientemente la estabilidad de la motocicleta, aumenta con el aumento del ángulo de lanzamiento, generándose un par autoalineante nulo con un ángulo de lanzamiento de 0º.
Esta configuración es bastante sencilla, pero plantea problemas importantes.
En primer lugar, por su geometría, los ejes delanteros tienden a hundirse durante las frenadas y expandirse durante las aceleraciones, provocando un movimiento de cabeceo, que es indeseable dado que aumenta la transferencia de carga entre ruedas.
Por otro lado, el mismo elemento estructural (en este caso, el eje delantero) soporta todo tipo de esfuerzos (laterales o de dirección, verticales o de suspensión, y longitudinales o de aceleración/frenada) y los transmite combinadamente tanto al chasis como al manillar; en la acción de dirección se mueve unitariamente todo el conjunto formado por el eje delantero y la rueda delantera; y la articulación del eje delantero con el chasis y el punto de apoyo del eje delantero sobre la rueda delantera están separados por una distancia significativa.
Esta configuración implica que los esfuerzos de aceleración/frenada viajen desde la rueda delantera hasta el chasis ascendiendo a lo largo del eje delantero, lo que provoca en tal eje delantero unas grandes solicitaciones, lo que a su vez provoca que se tienda a aumentar la rigidez del eje delantero a base de vástagos con mayores grosores. Así, el eje delantero supone una parte importante del peso total de la motocicleta, lo que a su vez provoca una concentración de peso en la parte delantera de la motocicleta, lejos del centro de gravedad, lo que también es indeseable.
Además, las ruedas delantera y trasera están unidas entre sí por medio del eje delantero y el chasis, y el vehículo está diseñado como para proporcionar equilibrio estable en régimen nominal (movimiento rectilíneo a velocidad constante). Sin embargo, las condiciones normales de uso de las motocicletas no se corresponden a menudo con el régimen nominal.
En la práctica, la flexibilidad del eje delantero, debida a la distancia desde su articulación con el chasis hasta su punto de apoyo sobre la rueda delantera, provoca incómodas y peligrosas oscilaciones, favorecidas por el peso del propio eje delantero, a menudo elevado como ya se ha mencionado.
Se dan pues situaciones anómalas conocidas en la técnica tales como el weave, el shimmy o wobble, la desaplicación de la rueda trasera con respecto al suelo debido a la frenada y la desaplicación de la rueda delantera con respecto al suelo debido a la aceleración; o simplemente situaciones normales fuera del régimen nominal, tales como el movimiento curvilíneo o la transferencia de cargas (dive o hundimiento de la horquilla delantera debido a la frenada, y squat o expansión de la horquilla delantera debido a la aceleración, sin llegar en ningún caso a la desaplicación de ninguna de las ruedas con respecto al suelo). Todas ellas son igualmente indeseables ya que afectan al equilibrio del vehículo y por consiguiente a su seguridad.
Para mejorar dicha configuración tradicional, se han propuesto configuraciones alternativas.
Una de tales configuraciones alternativas (denominada en lo sucesivo "de suspensión desplazada") incluye un brazo esencialmente horizontal, que une de manera articulada el eje delantero y el chasis, y un amortiguador dispuesto de manera esencialmente vertical por encima de dicho brazo, que une de manera articulada dicho brazo y el chasis.
En esta configuración sólo se aíslan parcialmente los esfuerzos (laterales o de dirección, verticales o de suspensión, y longitudinales o de aceleración/frenada), pues todos ellos viajan desde la rueda delantera hasta el chasis ascendiendo a lo largo del eje delantero, si bien en cierto punto de dicho eje delantero los esfuerzos longitudinales o de aceleración/frenada y los esfuerzos verticales o de suspensión son transmitidos separadamente al chasis con la intermediación de dicho brazo y dicho amortiguador, respectivamente.
Además, en la acción de dirección todavía se mueve unitariamente todo el conjunto formado por el eje delantero y la rueda delantera, y la articulación del eje delantero con el chasis y el punto de apoyo del eje delantero sobre la rueda delantera todavía están separados por una distancia significativa.
Otra de tales configuraciones alternativas (denominada en lo sucesivo "en voladizo sin eje delantero") comprende una estructura sustancialmente independiente para la acción de dirección. En concreto, en cuanto a la estructura de dirección, esta configuración alternativa comprende un dispositivo de dirección en el centro del buje (o dispositivo de CHS del inglés "Center Hub Steering") mediante el cual la acción de dirección se realiza directamente sobre el centro (tanto radial como lateral) de la rueda delantera, y el eje delantero se ha eliminado y el giro del manillar se transmite a la rueda delantera a través de un varillaje de dirección. En cuanto a la estructura de suspensión, la configuración incluye un par de basculantes esencialmente horizontales, unidos de manera articulada por su extremo delantero al centro de la rueda delantera y unidos a pivote por su extremo trasero al chasis, y un amortiguador dispuesto de manera esencialmente vertical por encima de dicho par de basculantes, que une a pivote dicho par de basculantes y el chasis.
Con esta configuración, sustancialmente el amortiguador soportará los esfuerzos de suspensión mientras que el par de basculantes horizontales absorberá los esfuerzos de aceleración/frenada y de dirección.
Sin embargo, esta configuración se complica enormemente debido a que el varillaje de dirección es un complejo sistema de transmisión de la acción de dirección desde el manillar hasta el chasis y desde éste, más o menos en paralelo con la estructura de suspensión, hasta el centro de la rueda delantera.
Además, debido a la geometría usada y los momentos creados en ella, el tren delantero comprende elementos de gran grosor y supone una parte importante del peso total de la motocicleta, lo que a su vez provoca indeseablemente una concentración de peso en la parte delantera de la motocicleta, lejos del centro de gravedad.
Otra más de tales configuraciones alternativas (denominada en lo sucesivo "en voladizo con eje delantero") es básicamente la anterior configuración en voladizo sin eje delantero con la particularidad de que se ha eliminado el complejo sistema de...
Reivindicaciones:
1. Grupo de dirección y de suspensión para el tren delantero de un vehículo de dos ruedas, que comprende:
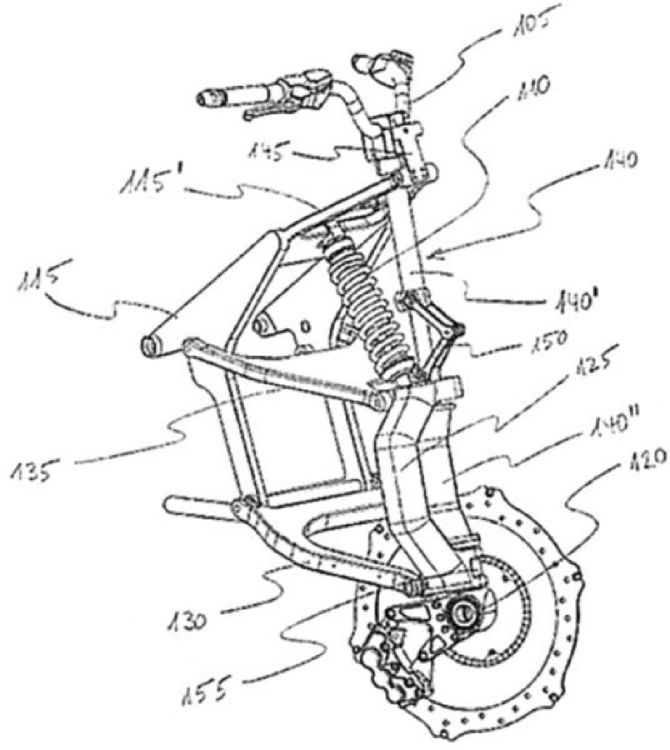
un manillar (105),
un amortiguador (110) ascendente,
un buje de rueda delantera con un dispositivo (120) de CHS,
un eje delantero (125) ascendente, coincidente con el eje geométrico de giro de dirección pero con un tramo de adaptación de eje, descentrado con relación a dicho eje geométrico de giro de dirección con un desarrollo esencialmente con forma de C como para llegar al dispositivo (120) de CHS sin interferir con la rueda delantera, y
unos basculantes inferior y superior (130, 135) esencialmente horizontales, unidos por su extremo delantero a dicho eje delantero (125) y por su extremo trasero al chasis (115) del vehículo, de modo que dicho eje delantero (125) y dichos basculantes inferior y superior (130, 135) forman una unidad basculante, extendiéndose operativamente dicho basculante inferior (130) entre dicho eje delantero (125) y el chasis (115) únicamente por el lado de dispositivo (120) de CHS del vehículo;
caracterizado porque dichos basculantes inferior y superior (130, 135) están unidos a pivote por su extremo delantero a dicho eje delantero (125) y están unidos a pivote por su extremo trasero al chasis (115), y dicho amortiguador (110) está unido a pivote por su extremo superior al chasis (115) y está unido a pivote por su extremo inferior a dicha unidad basculante, y porque comprende adicionalmente un árbol (140) de dirección que está solidarizado por su extremo inferior a dicho dispositivo (120) de CHS y por su extremo superior a dicho manillar (105), y está además articulado en las proximidades de su extremo superior al chasis (115), definiendo dicho árbol (140) de dirección el eje geométrico de giro de dirección y comprendiendo:
una parte superior (140') de árbol dividida en al menos dos porciones de árbol que están vinculadas como para moverse axialmente una con relación a la otra, y
una parte inferior (140'') de árbol que incluye un tramo de adaptación de árbol, descentrado con relación a dicho eje geométrico de giro de dirección con un desarrollo esencialmente con forma de C como para llegar al dispositivo (120) de CHS sin interferir con la rueda delantera, cuyo plano de descentramiento es esencialmente perpendicular al plano diametral de la rueda delantera y cuyo descentramiento con relación al eje geométrico de giro de dirección es menor que el descentramiento de dicho tramo de adaptación de eje con relación al eje geométrico de giro de dirección tomados a la misma altura;
teniendo dicho eje delantero (125) un agujero pasante superior y un agujero pasante inferior por los cuales se extiende dicho árbol (140) de dirección, de modo que dicho tramo de adaptación de árbol está enmarcado por dicho tramo de adaptación de eje y de modo que dicho árbol (140) de dirección es libre de girar dentro de dichos agujeros pasantes de dicho eje delantero (125); teniendo dicho árbol (140) de dirección un asiento (155) adyacente a su extremo inferior, en el que el extremo inferior de dicho eje delantero (125) está recibido de manera axialmente fija.
2. Grupo de dirección y de suspensión de acuerdo con la reivindicación 1, en el que dicho amortiguador (110) está unido a pivote por su extremo superior al chasis (115) y está unido a pivote por su extremo inferior al punto en el que dicho basculante superior (135) está unido a pivote a dicho eje delantero (125).
3. Grupo de dirección y de suspensión de acuerdo con la reivindicación 1, en el que dicho amortiguador (110) está unido a pivote por su extremo superior al chasis (115) y está unido a pivote por su extremo inferior al punto en el que dicho basculante inferior (130) está unido a pivote a dicho eje delantero (125).
4. Grupo de dirección y de suspensión de acuerdo con una cualquiera de las reivindicaciones anteriores, en el que dicho amortiguador (110) es del tipo de pistón.
5. Grupo de dirección y de suspensión de acuerdo con la reivindicación 4, en el que dicho amortiguador (110) está reforzado con muelle.
6. Grupo de dirección y de suspensión de acuerdo con una cualquiera de las reivindicaciones anteriores, en el que dicho eje delantero (125), y correspondientemente dicho árbol (140) de dirección, están inclinados hacia atrás con respecto a la vertical, como para formar un ángulo de lanzamiento superior a 0º.
7. Grupo de dirección y de suspensión de acuerdo con una cualquiera de las reivindicaciones anteriores, en el que dicho amortiguador (110) está inclinado hacia atrás con respecto a la vertical.
8. Grupo de dirección y de suspensión de acuerdo con una cualquiera de las reivindicaciones anteriores, en el que el chasis (115) incluye una proyección (115') que sobresale hacia delante más allá de dicho árbol (140) de dirección, con un consiguiente vaciado en correspondencia con dicho árbol (140) de dirección como para evitar interferencias, y en el que dicho árbol (140) de dirección está articulado en las proximidades de su extremo superior al chasis (115) por medio de una ballesta (145) unida a pivote al extremo delantero de dicha proyección (115') y articulada mediante una rótula a dicho árbol (140) de dirección.
9. Grupo de dirección y de suspensión de acuerdo con una cualquiera de las reivindicaciones anteriores, en el que dichas al menos dos porciones de árbol de dicha parte superior (140') de árbol están vinculadas entre sí como para moverse axialmente una con relación a la otra, de manera telescópica.
10. Grupo de dirección y de suspensión de acuerdo con la reivindicación 9, en el que una tijera (150) de amortiguación está dispuesta en dicha parte superior (140') de árbol, impidiendo dicha tijera (150) de amortiguación el movimiento giratorio relativo de ambas porciones y limitando dicha tijera (150) de amortiguación el movimiento axial relativo de ambas porciones.
11. Grupo de dirección y de suspensión de acuerdo con una cualquiera de las reivindicaciones 1 a 8, en el que dichas al menos dos porciones de árbol de dicha parte superior de árbol están espaciadas axialmente una de otra y vinculadas entre sí mediante tres tijeras de amortiguación, repartidas a lo largo de la circunferencia del árbol de dirección como para impedir el movimiento giratorio relativo de ambas porciones y limitar el movimiento axial relativo de ambas porciones.
12. Grupo de dirección y de suspensión de acuerdo con una cualquiera de las reivindicaciones anteriores, en el que la trayectoria recta de prolongación hacia atrás de dicho basculante inferior (130) y la trayectoria recta de prolongación hacia atrás de dicho basculante superior (135) no son paralelas, esto es, se cortan en un punto (200) de intersección de trayectorias de basculantes.
13. Procedimiento de parametrización de basculantes en un grupo de dirección y de suspensión para el tren delantero de un vehículo de dos ruedas de acuerdo con la reivindicación 12 montado en un vehículo de dos ruedas, caracterizado porque, tras predeterminar los parámetros de geometría del conjunto vehículo-conductor, que incluyen el nivel de antihundimiento deseado pero no incluyen los parámetros de dichos basculantes inferior y superior (130, 135), dichos basculantes inferior y superior (130, 135) se parametrizan de manera que el punto (200) de intersección de trayectorias de basculantes se sitúa de modo que, considerando una recta vertical (220) que pasa por el punto (210) de apoyo de la rueda trasera del vehículo sobre el suelo y una recta oblicua (215) que une el punto (205) de apoyo de la rueda delantera del vehículo sobre el suelo y dicho punto (200) de intersección de trayectorias de basculantes, el cociente

coincide con el nivel de antihundimiento deseado predeterminado.
14. Procedimiento de parametrización de basculantes de acuerdo con la reivindicación 13, en el que el cociente

es 0,7.
Patentes similares o relacionadas:
Biciclo, del 1 de Abril de 2020, de Technische Hochschule Köln: Biciclo con un marco que incluye - un tubo de dirección delantero, que define un eje de desvío delantero y sobre el cual está colocado […]
 Vehículo con columna de dirección inclinada, del 26 de Junio de 2019, de DECATHLON: Vehículo , por ejemplo de tipo patinete, que comprende:
- una plataforma apta para soportar directamente o indirectamente a un usuario y que comprende un plano de […]
Vehículo con columna de dirección inclinada, del 26 de Junio de 2019, de DECATHLON: Vehículo , por ejemplo de tipo patinete, que comprende:
- una plataforma apta para soportar directamente o indirectamente a un usuario y que comprende un plano de […]
Suspensión delantera de un vehículo, del 28 de Mayo de 2019, de EDAG Engineering GmbH: Vehículo de dos o de tres ruedas con estructura de apoyo , motor , manillar de vehículo , rueda trasera , rueda delantera y […]
Vehículo, del 9 de Mayo de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo que comprende: un bastidor de vehículo; una rueda (31; 1032; 2003R) delantera derecha y una rueda […]
Conjunto para bicicleta, del 27 de Febrero de 2019, de LOOK CYCLE INTERNATIONAL: Conjunto para bicicleta que comprende: - un cuadro de bicicleta que comprende un casquillo de dirección que comprende una abertura (10a) de extremo inferior […]
Dispositivo de freno de disco hidráulico para una bicicleta, del 9 de Enero de 2019, de Giant Manufacturing Co., Ltd: Un dispositivo de freno de disco hidráulico para una bicicleta, el dispositivo de freno de disco hidráulico se puede ensamblar en un cuerpo del tubo de […]
SISTEMA DE SUSPENSION ACOPLADO PARA BICICLETAS, del 23 de Agosto de 2018, de ZUMA INNOVATION S.L: 1. Bicicleta que comprende: - al menos un cuadro definido en un plano principal (X); el cual comprende un tubo de dirección superior definido respecto al eje […]
Aparcabicis, del 9 de Abril de 2018, de BENJUMEA GAMEZ, Francisco: 1. Aparcabicis, es un aparato para el estacionamiento de bicicletas, que comprende cuatro extremos/lados de hierro que forman dicho objeto y que están unidos en su parte […]