Procedimiento para la evaluación de los datos de sensor referentes al entorno de un vehículo de motor de al menos un sensor del entorno y vehículo de motor.
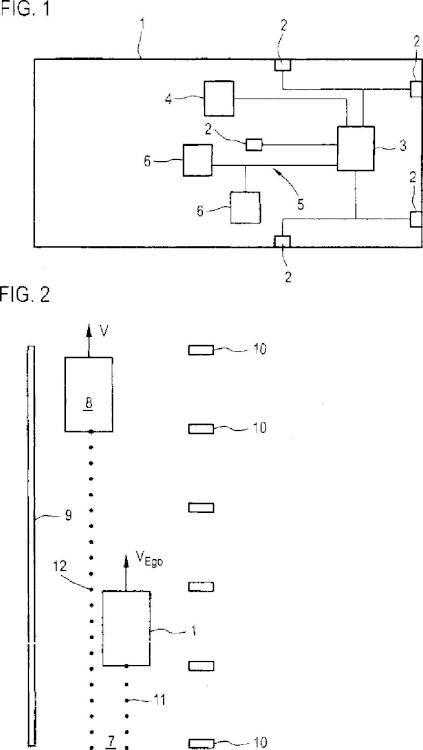
Procedimiento para la evaluación de datos de sensor referidos al entorno de un vehículo (1) de motor de al menos un sensor (2) del entorno,
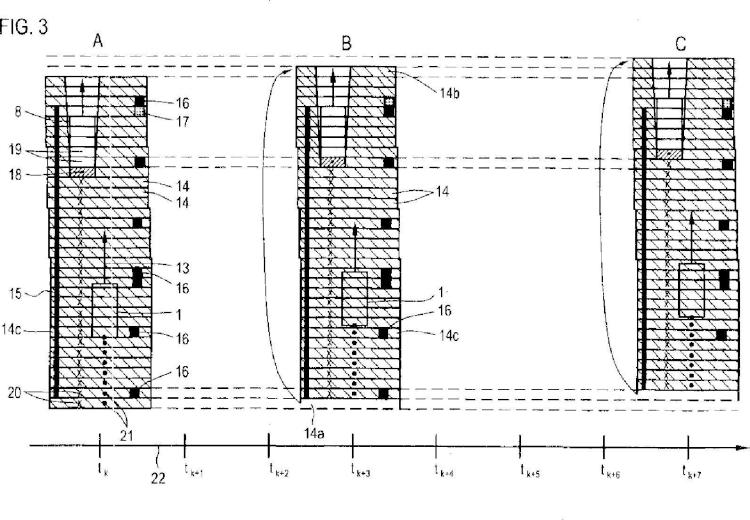
caracterizado por que para la descripción de la posición de una característica del entorno registrada en el marco de la evaluación se asigna esta a una de varias franjas (14) sucesivas en la dirección (13) longitudinal del vehiculo (1) de motor junto con al menos una indicación continua de su posición transversal dentro de la franja (14) perpendicularmente a la dirección (13) longitudinal del vehículo (1) de motor en el plano de la calzada.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10015761.
Solicitante: AUDI AG.
Nacionalidad solicitante: Alemania.
Dirección: 85045 INGOLSTADT ALEMANIA.
Inventor/es: HOFMANN, ULRICH, BOUZOURAA,MOHAMED ESSAYED.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60W30/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 30/00 Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo. › Anticipación o prevención de colisiones probables o inminentes.
- B60W30/095 B60W 30/00 […] › Predicción de la trayectoria o probabilidad de choque.
- B60W40/02 B60W […] › B60W 40/00 Cálculo o estimación de los parámetros de funcionamiento para el sistema de ayuda a la conducción de vehículos terrestres que no están relacionados con el control de una subunidad particular. › relacionados con las condiciones ambientales.
- G06K9/00 FISICA. › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00).
PDF original: ES-2533623_T3.pdf
Fragmento de la descripción:
Procedimiento para la evaluación de los datos de sensor referentes al entorno de un vehículo de motor de al menos un sensor del entorno y vehículo de motor
El invento se refiere a un procedimiento para la evaluación de los datos de sensor referentes al entorno de un vehículo de motor de al menos un sensor del entorno así como a un vehículo correspondiente.
Numerosas clases de sistemas actuales de asistencia al conductor necesitan información de los objetos del entorno del vehículo propio, por ejemplo para controlar de manera definida la conducción longitudinal y/o transversal del vehículo propio o para generar las correspondientes indicaciones a un conductor. Ejemplos de estos sistemas de asistencia al conductor son por ejemplo los sistemas de regulación de la distancia (por ejemplo el "automatic cruise control"), los sistemas de conducción transversal o los asistentes de aparcamiento. Los aparatos de mando de estos sistemas de asistencia al conductor disponen para ello del acceso a uno o varios sensores del entorno, que suministran datos de sensor de los que se pueden derivar la posición y otras características de los objetos del entorno. Para las propias funciones de los sistemas de asistencia al conductor también es por ello importante en numerosos casos la posición de un objeto del entorno o de otra característica del entorno.
Se conocen dos métodos principales para la percepción del entorno y para su representación por medio de un sistema de sensores del entorno. El primer método se centra en la estimación de la dinámica y de la forma de los objetos por medio de modelos de parámetros de determinadas clases de objetos. La percepción del entorno, es decir en última instancia la evaluación, se basa aquí en la mayoría de los casos en la detección basada en sensores y en el seguimiento y la estimación basada en modelos de los obstáculos. Por medio de este seguimiento basado en modelos es posible tener en cuenta la inseguridad de los sensores y puentear los pequeños fallos de las mediciones, por ejemplo por ocultamiento.
El segundo método conocido se centra en una representación basada en una retícula de los obstáculos estacionarios no estructurados manteniendo la relación de vecindad y una descripción explícita de los espacios libres y desconocidos. Cada celda de la retícula de ocupación posee generalmente en este caso un tamaño de celda predefinido y contiene una probabilidad de que se encuentre en ella un obstáculo o que esté libre.
Los dos métodos poseen, sin embargo, graves inconvenientes. La detección y el seguimiento de obstáculos basados en un modelo sólo hace posible la obtención de información de los objetos en el entorno. La información de los espacios libres y de las zonas no observadas en el entorno del vehículo de motor no es tenida en cuenta. Sin embargo, esta información es muy importante para un modelo consistente del entorno y para los sistemas de asistencia al conductor altamente automatizados, ya que la conclusión de que allí donde según el modelo no existen objetos y que también hay una total ausencia de obstáculos no tiene validez general.
El inconveniente de los métodos basados en una retícula con un tamaño fijo de las celdas es la necesidad de una gran capacidad de cálculo, que no existe en los aparatos de mando usuales. Además, el contenido de la información es poco concreto en una retícula de ocupación de esta clase, de manera, que es necesaria una extracción adicional de información.
El documento DE 10 2005 005 347 A1 se refiere a un sistema de asistencia al conductor, que posee dos sensores del entorno, cuyos campos de barrido se solapan al menos parcialmente. De los datos de los sensores del entorno se deben crear a partir de puntos de imagen dispuestos en columnas y en filas imágenes fijas del entorno del vehículo, asignando a las líneas de las imágenes valores de distancia. De esta manera debe ser posible la determinación de la distancia de un objeto registrado a partir de la posición relativa de la línea en la imagen.
En el documento DE 10 2006 058 308 A1 se describen un procedimiento y un dispositivo para la detección de obstáculos en una zona del entorno de un vehículo de motor en el que en un modelo de retícula se subdivide la zona del entorno en una pluralidad de campos, determinando para cada campo una probabilidad como medida de la existencia de un obstáculo. El invento se basa por ello en el problema de divulgar un procedimiento con el que sea posible una representación eficiente, poco costosa desde el punto de vista de cálculo de las características del entorno, teniendo en cuenta y reproduciendo toda la información relevante.
Para la solución de este problema se prevé según el invento en un procedimiento para la evaluación de los datos de sensor referidos al entorno de un vehículo de motor al menos un sensor del entorno y que para la descripción de la posición de una características del entorno detectada en el marco de la evaluación se asigne esta a varias franjas sucesivas en la dirección longitudinal del vehículo de motor junto con al menos un dato continuo de su posición transversal dentro de la franja perpendicularmente a la dirección longitudinal del vehículo de motor en el plano de la cazada.
Por lo tanto, según el invento se propone, que se realice una cuantificación a modo de retícula durante el registro de la Información en la dirección longitudinal del vehículo (que en la mayoría de los casos se corresponde con el sentido de marcha), mientras que la posición transversal dentro de la franje es indicada de manera continua. Por lo tanto, una representación de esta clase puede ser interpretada como una representación reticulada eficiente con posiciones de las franjas discretizadas en la dirección longitudinal del vehículo. Dado que en última instancia no es necesario contemplar celdas de la retícula en el sentido transversal, se obtiene una representación mucho más eficiente. Esta eficiencia se manifiesta en especial en la necesidad de una menor ocupación de la memoria y, por lo tanto también en una menor carga de las líneas de comunicación, por ejemplo de una línea de Bus del vehículo. También se reduce el volumen de cálculo.
Además, la introducción, la actualización y la extracción de las características del entorno se simplifican en comparación con la representación rígida basada en una retícula, ya que las nuevas características del entorno pueden ser introducidas y extraídas de una manera esencialmente más compacta. Sin embargo, al mismo tiempo se conserva la relación de vecindad de las características del entorno, que es la gran ventaja del mapa reticulado con un tamaño fijo de las celdas. De esta manera se pueden reproducir de una manera más eficiente desde el punto de vista de los costes y del tiempo de cálculo las ventajas de un mapa reticulado con un tamaño fijo de las celdas. El procedimiento según el invento es por ello aplicable a aparatos de mando con una capacidad de cálculo limitada.
Otras ventajas del procedimiento según el invento se desprenden también de la evaluación ulterior concreta de los datos del sensor desde el punto vista de las funciones del sistema de asistencia al conductor, ya que, por ejemplo para la interpretación de escenarios de tráfico, es con frecuencia necesario crear representaciones de los objetos del entorno para poder acumular y/o evaluar una información adicional derivada, como por ejemplo las relaciones entre los objetos del entorno o las intenciones de maniobra de los objetos del entorno. La relación necesaria para ello ya existe de manera ventajosa debido a la descripción simultánea de las características del entorno dentro de la correspondiente franja.
La cantidad de franjas, su extensión en la dirección longitudinal del vehículo o su extensión (en el caso de que se prevea) en la dirección transversal del vehículo de deberían elegir de acuerdo con la correspondiente aplicación. Así por ejemplo, se pueden utilizar 50 franjas con una extensión de 1 metro en la dirección longitudinal del vehículo de motor, debiendo hallarse delante del vehículo una mayor cantidad de franjas que detrás de él.
Como ya se mencionó, no es fundamentalmente necesaria una limitación del ancho de las franjas debido a la posición transversal indicada de manera continua, pero a pesar de ello puede ser determinada para utilizar una zona claramente definida. En una configuración de esta clase es conveniente, que la posición de las franjas se elija perpendicular a la dirección longitudinal del vehículo de motor en función de la predicción de una trayectoria, en especial del trazado futuro de la calzada. El trazado de la calzada puede ser determinado en este caso a partir de un sistema... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la evaluación de datos de sensor referidos al entorno de un vehículo (1) de motor de al menos un sensor (2) del entorno, caracterizado por que para la descripción de la posición de una característica del entorno registrada en el marco de la evaluación se asigna esta a una de varias franjas (14) sucesivas en la dirección (13) longitudinal del vehículo (1) de motor junto con al menos una indicación continua de su posición transversal dentro de la franja (14) perpendicularmente a la dirección (13) longitudinal del vehículo (1) de motor en el plano de la calzada.
2. Procedimiento según la reivindicación 1, caracterizado por que todas las franjas (14) poseen el mismo tamaño y/o por que la posición de las franjas (14) perpendicularmente a la dirección (13) longitudinal del vehículo (1) de motor se elige en función de una trayectoria predicha del vehículo (1) de motor, es especial del trazado futuro de la calzada.
3. Procedimiento según la reivindicación 1 ó 2, caracterizado por que con un avance del vehículo (1) de motor en la extensión de una franja (14) la franja (14) más alejada en el sentido contrario al de la marcha es eliminada de la contemplación y por que se agrega una franja (14) en el sentido de marcha.
4. Procedimiento según la reivindicación 3, caracterizado por que al eliminar y agregar una franja (14) se desplazan todas las demás franjas (14) con relación al vehículo (1) de motor una posición contra el sentido de marcha.
5. Procedimiento según una de las reivindicaciones precedentes, caracterizado por que las características del entorno son descritas por los contenedores de datos, que contienen al menos una parte de la descripción de la posición.
6. Procedimiento según la reivindicación 5, caracterizado por que los contenedores de datos contienen, además de la posición transversal, una posición longitudinal dentro de la franja (14) en la dirección (13) longitudinal del vehículo (1) de motor, en especial como desviación del centro de la franja.
7. Procedimiento según la reivindicación 5 ó 6, caracterizado por que se utiliza al menos un contenedor de datos del tipo de celda (20, 21) puntual en el que la posición transversal equivale a un determinado punto dentro de la franja (14) y/o por que se utiliza al menos un contenedor de datos del tipo de celda (15, 16, 18, 19) de intervalo en el que la posición transversal se describe con una limitación izquierda y una derecha de un intervalo.
8. Procedimiento según la reivindicación 7, caracterizado por que se utiliza una probabilidad de ocupación y/o una clase de ocupación, en especial elegida del grupo "espacio ocupado", "espacio libre", "espacio desconocido" y "espacio conflictivo" y/o una celda (15, 16, 18, 19) de intervalo, que comprenda una clase dinámica, en especial elegida del grupo "estacionario" y "dinámico".
9. Procedimiento según una de las reivindicaciones 5 a 8, caracterizado por que los contenedores de datos comprenden los posibles valores de variación asignados a las posiciones, determinados también teniendo en cuenta las datos del entorno.
10. Procedimiento según una de las reivindicaciones 5 a 9, caracterizado por que los contenedores de datos contienen, además, al menos otro campo de datos, que describe la característica del entorno, en especial la clase de la característica del entorno, una propiedad de la característica del entorno, la velocidad de la característica del entorno y/o una propiedad predicha esperada, en especial la posición, de la característica del entorno.
11. Procedimiento según una de las reivindicaciones 5 a 10, caracterizado por que a partir de los datos de sensor se determinan características abstractas del entorno y/o los datos de sensor se acumulan como datos de medición individuales en los contenedores de datos.
12. Procedimiento según una de las reivindicaciones 5 a 11, caracterizado por que se utiliza al menos un procedimiento de predicción y corrección para estimar la posición y/u otro campo de datos, en especial de una probabilidad de ocupación.
13. Procedimiento según la reivindicación 12, caracterizado por que para la estimación de una posición nueva de la característica del entorno se determina en primer lugar, después del registro de nuevos datos de sensor, cómo se habría movido el objeto, debido a la información conocida, en especial contenida en campos adicionales de datos, en el intervalo desde la última estimación de la posición, teniendo lugar a continuación un ajuste con los nuevos datos de sensor.
14. Procedimiento según una de las reivindicaciones precedentes, caracterizado por que por medio de al menos una característica del entorno, en especial por medio de al menos una celda (20, 21) puntual, se contempla una trayectoria (12) del objeto del entorno.
15. Procedimiento según una de las reivindicaciones precedentes, caracterizado por que se utiliza la descripción de la posición en el estado gobernado de al menos un sistema de asistencia al conductor y/o se transmite a través de un Bus (5) del vehículo, en especial un Bus CAN o un Bus Flexray, a al menos un sistema (6) del vehículo, en especial a al menos una sistema de asistencia al conductor.
16. Vehículo (1) de motor, que comprende un sistema (4) inercial de sensores para la determinación del
movimiento propio de vehículo (1), al menos un sensor (2) del entorno y un aparato (3) de mando, configurado para la evaluación de los datos de sensor del sensor (2) del entorno, aparato que está configurado para la realización del procedimiento según una de las reivindicaciones precedentes.
Patentes similares o relacionadas:
Método y aparato de autentificación de identidad, terminal y servidor, del 29 de Julio de 2020, de Advanced New Technologies Co., Ltd: Un método de autenticación de identidad, en donde el método comprende: adquirir información de rasgos faciales de un usuario y utilizar la información […]
 Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Dispositivo de procesamiento de imágenes, método de procesamiento de imágenes y programa, del 29 de Julio de 2020, de RAKUTEN, INC: Dispositivo de procesamiento de imágenes, que comprende: medios de obtención de imágenes captadas para la lectura de datos […]
PROCEDIMIENTO Y DISPOSITIVO DE REGISTRO AUTOMÁTICO DE LA LOCOMOCIÓN DE NEMATODOS U ORGANISMOS PEQUEÑOS DE TAMAÑOS SIMILARES POR INTERFEROMETRÍA TEMPORAL DE MICROHACES DE LUZ, del 23 de Julio de 2020, de PHYLUMTECH S.A: Procedimiento y dispositivo de registro automático de la locomoción de nematodos u organismos pequeños de tamaños similares por interferometría temporal de microhaces […]
MÉTODO PARA LA ELIMINACIÓN DEL SESGO EN SISTEMAS DE RECONOCIMIENTO BIOMÉTRICO, del 2 de Julio de 2020, de UNIVERSIDAD AUTONOMA DE MADRID: Método para eliminación del sesgo (por edad, etnia o género) en sistemas de reconocimiento biométrico, que comprende definir un conjunto de M muestras de Y personas […]
Cámara inteligente para compartir fotografías automáticamente, del 1 de Julio de 2020, de QUALCOMM INCORPORATED: Un procedimiento para compartir una imagen final utilizando un dispositivo, en el que el procedimiento es realizado por un servidor y comprende: […]
Método, dispositivo de generación de imagen y sistema para generar una medición de autenticidad de un objeto, del 1 de Julio de 2020, de SICPA HOLDING SA: Un método, llevado a cabo por un dispositivo de generación de imagen , para generar una medición de autenticidad de un objeto o para contribuir en la generación […]
Estimación de una postura basada en la silueta, del 24 de Junio de 2020, de VIZRT AG: Un método implementado por ordenador para estimar una postura de un modelo de objeto articulado , en el que el modelo de objeto articulado […]