Una embarcación, una plataforma de movimientos, un sistema de control, un método para compensar los movimientos de una embarcación y un producto de programa de computadora.
Una embarcación (1) que incluye una plataforma de compensación de movimientos (4),
cuya plataforma comprende:
- al menos un portador (6) para soportar, mover y/o transferir una carga;
- un número de primeros actuadores (5) para mover el portador (6) con relación a la embarcación (1);
- un sistema de control (8) dispuesto para accionar el número de primeros actuadores, y caracterizada porque comprende además
- una pasarela (16) proporcionada con un primer extremo (16a) conectado giratoriamente al portador (6) y un segundo extremo (16b) para entrar en contacto con un área objetivo (2),
- al menos un segundo actuador para mover la pasarela (16) con relación al portador (6), y
- sensores de movimiento (7) o movimientos que se miden con relación a al menos un elemento en un área objetivo, cuyas mediciones se usan como entrada para el sistema de control (8), en donde el sistema de control se dispone además para accionar el al menos un segundo actuador.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/NL2011/050561.
Solicitante: Ampelmann Operations B.V.
Nacionalidad solicitante: Países Bajos.
Dirección: Kluyverweg 1 2629 HS Delft PAISES BAJOS.
Inventor/es: VAN DER TEMPEL,Jan, GÖBEL,Arie Jan, GERNER,FREDERIK WILLEM BOUDEWIJN, CERDA SALZMANN,DAVID JULIO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63B27/10 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06). › B63B 27/00 Disposición de equipos a bordo para el embarque o el desembarque de carga o de pasajeros (gabarras o barcazas de descarga automática B63B 35/30; grúas flotantes B66C 23/52). › de grúas.
- B63B27/14 B63B 27/00 […] › de rampas, pasarelas o escaleras exteriores.
PDF original: ES-2503217_T3.pdf
Fragmento de la descripción:
Una embarcación, una plataforma de movimientos, un sistema de control, un método para compensar los movimientos de una embarcación y un producto de programa de computadora
La invención se refiere a una embarcación que incluye una plataforma de compensación de movimientos, cuya plataforma comprende al menos un portador para soportar, mover y/o transferir una carga, una pasarela provista con un primer extremo conectado giratoriamente al portador y un segundo extremo para entrar en contacto con un área objetivo, un número de primeros actuadores para mover el portador con relación a la embarcación, al menos un segundo actuador para mover la pasarela con relación al portador, un sistema de control dispuesto para accionar el número de primeros actuadores, y sensores de movimiento para medir los movimientos con relación a al menos un elemento en un área objetivo, cuyas mediciones se usan como entrada para el sistema de control.
Tal embarcación se conoce, por ejemplo, de la publicación internacional de patente WO 27/1239, la cual se considera la técnica anterior más cercana. La plataforma comprende un portador transportado por seis cilindros hidráulicos, y una pasarela móvil conectada al portador proporcionando una conexión entre el portador y el mundo fijo, tal como una construcción costa afuera. Durante su funcionamiento, con la ayuda de sensores, se miden los movimientos de la respectiva embarcación. Con la ayuda de estas mediciones, la orientación de los cilindros hidráulicos es impulsada continuamente de manera que el portador permanece aproximadamente estacionarlo con relación al mundo fijo. De esta manera, los movimientos de la embarcación se compensan de manera que se hace posible la transferencia entre la embarcación y el mundo fijo, o viceversa.
Uno de los objetivos de la Invención es mejorar una embarcación que incluye una plataforma de movimientos.
Otro objetivo de la invención es reducir los costos de fabricación de una plataforma de movimientos.
Al menos uno de estos y otros objetivos se logran con una embarcación de acuerdo con el preámbulo en donde el sistema de control se dispone además para accionar el al menos un segundo actuador.
Accionando también el al menos un segundo actuador, un movimiento de la embarcación con respecto a un área objetivo puede compensarse, al menos parcialmente, por un movimiento de la pasarela con respecto al portador, reduciendo de esta manera el desempeño de compensación requerido del portador con respecto a la embarcación. Como un ejemplo, el sistema de control de la plataforma puede disponerse para compensar un movimiento de la embarcación en al menos un grado de libertad, por ejemplo la posición vertical de la embarcación, accionando el al menos un segundo actuador. Entonces, el movimiento de compensación desempeñado por el portador debe ejecutarse en solamente cinco grados de libertad. Debido a que los requerimientos para el desempeño de compensación del portador disminuyen, el diseño del portador puede hacerse más simple, reduciendo por tanto los costos de fabricación.
El sistema de control puede disponerse para accionar el número de primeros actuadores y el al menos un segundo actuador para mantener el segundo extremo de la pasarela sustancialmente estacionario con relación a un área objetivo, de manera que se aplica un acercamiento de una compensación integral para compensar los movimientos de la embarcación, y puede proporcionarse una transferencia segura entre el portador y el área objetivo.
Preferentemente, el sistema de control se dispone para compensar el movimiento de la embarcación en menos de cinco grados de libertad, por ejemplo tres grados de libertad, accionando el número de primeros actuadores. A manera de ejemplo, el portador compensa entonces el grado de giro, viraje e inclinación de la embarcación, de manera que el número de primeros actuadores puedan ¡mplementarse relativamente compactos, y reduciendo por tanto aún más los costos de fabricación.
Se hace notar que en este contexto, el área objetivo debe entenderse como un área en una estructura que está separada de la embarcación, que tiene una posición que es independiente de la posición de la embarcación, que está ya sea estacionaria, tal como una construcción costa afuera, o que se mueve de manera diferente a la embarcación, por ejemplo otra embarcación, permitiendo de manera que la transferencia de embarcación a embarcación.
La invención también se refiere a una plataforma de movimientos.
Adicionalmente, la invención se refiere a un sistema de control.
La invención se refiere más adelante a un método para compensar los movimientos de una embarcación.
Más aún, la invención se refiere a un producto de programa de computadora. Un producto de programa de computadora puede comprender un conjunto de instrucciones ejecutables por una computadora, almacenadas en un portador de datos, tales como un CD o un DVD. El conjunto de instrucciones ejecutables por una computadora que permite a una computadora programable llevar a cabo el método definido anteriormente, puede también estar disponible para descargar desde un servidor remoto, por ejemplo mediante Internet.
Otras modalidades ventajosas de acuerdo con la invención se describen en las siguientes reivindicaciones.
Para claridad de la invención, modalidades ilustrativas de una embarcación, plataforma de movimientos, método y uso de acuerdo con la invención serán posteriormente aclarados con referencia de los dibujos. En los dibujos:
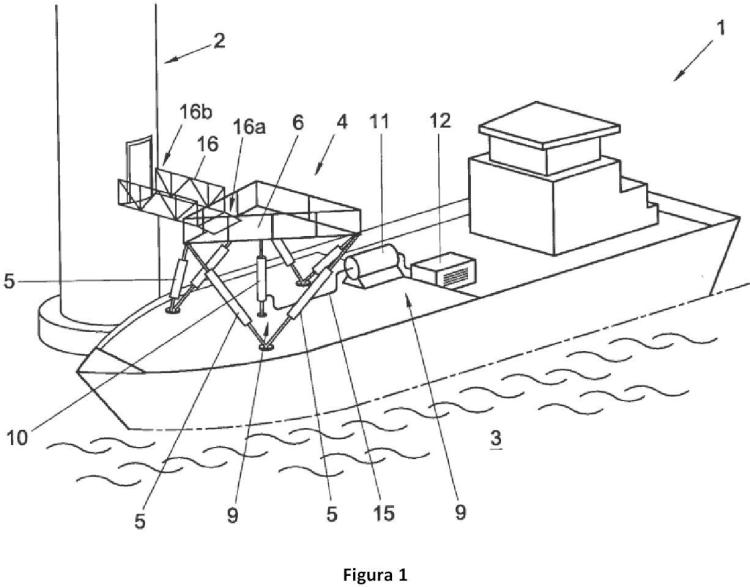
La Fig. 1 muestra una vista en perspectiva esquemática de una embarcación de acuerdo con la invención;
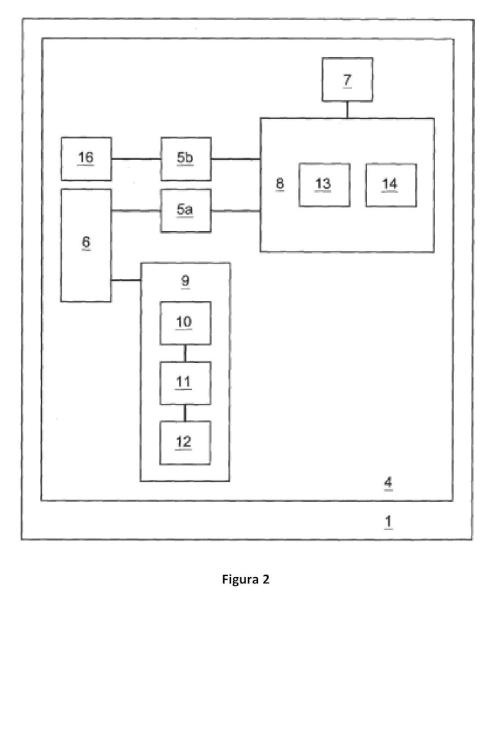
La Fig. 2 muestra un diagrama esquemático de la embarcación mostrada en la Fig. 1;
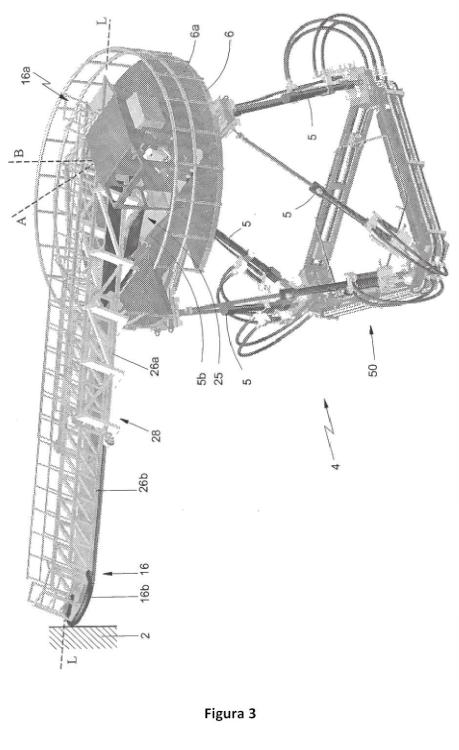
La Fig. 3 muestra una perspectiva esquemática de un plataforma de movimientos de acuerdo con la invención; y
La Fig. 4 muestra un diagrama de flujo de una modalidad de un método de acuerdo con la invención.
En esta descripción, las partes idénticas o correspondientes tienen referencias numerales idénticas o correspondientes. En los dibujos, las modalidades se dan solo como ejemplos. Las partes usadas allí se mencionan solamente como un ejemplo y no deberían interpretarse como una limitante de ninguna manera. Otras partes también pueden utilizarse dentro del marco de la presente invención.
La Figura 1 muestra esquemáticamente una modalidad de una embarcación 1 de acuerdo con la invención. Con esta embarcación 1, una carga tal como personas, animales, mercancías y/u otras cargas pueden transferirse desde la embarcación 1 hacia un área objetivo, tal como una estructura o una base de, por ejemplo, un molino 2 en el mar 3, y viceversa. Para la transferencia, la embarcación 1 se provee con una plataforma de compensación de movimientos 4. Esta plataforma compensa los movimientos de la embarcación 1 con el propósito de sostener parte de la plataforma en contacto con el molino 2 relativamente inmóvil con relación al molino 2, de manera que por ejemplo las personas tales como el personal de construcción del molino puedan realizar una transferencia relativamente segura. Los movimientos de la embarcación 1 que pueden compensarse pueden comprender movimientos lineales tales como olas (la embarcación se mueve del frente hacia atrás), marea (hacia arriba y hacia abajo) y oscilaciones (hacia los lados), y movimientos de rotación tales como giros (se inclina de izquierda a derecha), virajes (la embarcación 1 gira de izquierda a derecha) e inclinaciones (inclinaciones hacia arriba y hacia abajo). Naturalmente, los movimientos de la embarcación 1 son a menudo combinaciones de estos movimientos lineales y de rotación.
Esta transferencia desde o hacia la embarcación 1 no debería estar, por supuesto, limitado a la transferencia desde y/o hacia los molinos 2. En principio, la transferencia puede llevarse a cabo entre la embarcación 1 y cualquier otro elemento que la rodee 2. La embarcación 1 es apropiada para transferir, por ejemplo, personas, animales y/o carga hacia, en principio, cualquier construcción costa afuera, tales como plataformas en el mar 3 y/u otras construcciones en el agua 3, etc. En ciertas modalidades, una embarcación 1 de acuerdo con la invención se diseña para transferir hacia cualquier parte que se encuentre conectada con el mundo fijo, tales como un muelle, un atracadero, acantilados, rocas empinadas, el fondo del mar etc. En ciertas modalidades, una embarcación 1 se ha hecho adecuada para transferir hacia otros elementos en movimiento y/o elementos flotantes, tal como, por ejemplo, otras embarcaciones. Con este propósito, con la ayuda de, por ejemplo, una cámara, un sensor óptico o similar, los movimientos de este elemento en movimiento pueden... [Seguir leyendo]
Reivindicaciones:
1. Una embarcación (1) que incluye una plataforma de compensación de movimientos (4), cuya plataforma comprende:
- al menos un portador (6) para soportar, mover y/o transferir una carga;
- un número de primeros actuadores (5) para mover el portador (6) con relación a la embarcación (1);
- un sistema de control (8) dispuesto para accionar el número de primeros actuadores, y caracterizada porque
comprende además
- una pasarela (16) proporcionada con un primer extremo (16a) conectado giratoriamente al portador (6) y un segundo extremo (16b) para entrar en contacto con un área objetivo (2),
- al menos un segundo actuador para mover la pasarela (16) con relación al portador (6), y
- sensores de movimiento (7) o movimientos que se miden con relación a al menos un elemento en un área objetivo, cuyas mediciones se usan como entrada para el sistema de control (8), en donde el sistema de control se dispone además para accionar el al menos un segundo actuador.
2. Una embarcación de acuerdo con la reivindicación 1, en donde el sistema de control se dispone para accionar el número de primeros actuadores y el al menos un segundo actuador para mantener el segundo extremo de la pasarela sustanclalmente estacionario con relación a un área objetivo.
3. Una embarcación de acuerdo con la reivindicación 1 o 2, en donde el sistema de control se dispone para compensar un movimiento de la embarcación en al menos un grado de libertad accionando el al menos un segundo actuador.
4. Una embarcación de acuerdo con la reivindicación 3, en donde el al menos un grado de libertad es sustancialmente la posición vertical de la embarcación.
5. Una embarcación de acuerdo con cualquiera de las reivindicaciones anteriores, en donde el al menos un segundo actuador se dispone para hacer girar la pasarela con respecto a un primer ángulo de giro sustancialmente paralelo al portador y transversal con respecto a un eje longitudinal de la pasarela.
6. Una embarcación de acuerdo con cualquiera de las reivindicaciones anteriores, en donde el al menos un segundo actuador se dispone para hacer girar la pasarela con respecto a un segundo ángulo de giro sustancialmente transversal con respecto al portador.
7. Una embarcación de acuerdo con cualquiera de las reivindicaciones anteriores, en donde el primer extremo de la pasarela se proporciona en una primera sección de la pasarela, en donde el segundo extremo de la pasarela se proporciona en una segunda sección de la pasarela, y en donde el al menos segundo actuador se dispone para mover la segunda sección de la pasarela con respecto a la primera sección de la pasarela sustancialmente a lo largo del eje longitudinal de la pasarela.
8. Una embarcación de acuerdo con cualquiera de las reivindicaciones anteriores, en donde el sistema de control se dispone para compensar un movimiento de la embarcación en a lo sumo cinco grados de libertad, preferentemente tres grados de libertad, accionando el número de primeros actuadores.
9. Una embarcación de acuerdo con cualquiera de las reivindicaciones anteriores, en donde los sensores de movimiento incluyen sensores de orientación y sensores para medir una distancia hacia el área objetivo.
1. Una embarcación de acuerdo con cualquiera de las reivindicaciones anteriores, en donde el número de primeros actuadores comprenden medios hidráulicos y/o neumáticos.
11. Una embarcación de acuerdo con cualquiera de las reivindicaciones anteriores, en donde la plataforma de compensación de movimientos comprende una plataforma Stewart con cilindros hidráulicos.
12. Una plataforma de movimientos, particularmente adecuada para una embarcación como se describió en cualquiera de las reivindicaciones 1-11, cuya plataforma comprende al menos un portador para soportar, mover y/o transferir
una carga, una pasarela proporcionada con un primer extremo conectado giratoriamente al portador y un segundo extremo para entrar en contacto con un área objetivo, un número de primeros actuadores para mover el portador con relación a la embarcación, al menos un segundo actuador para mover la pasarela con relación al portador, un sistema de control dispuesto para accionar el número de primeros actuadores, y sensores de movimiento para medir con relación a al menos un elemento en un área objetivo, cuyas mediciones se usan como entrada para el sistema de control, en donde el sistema de control se dispone además para accionar el al menos un segundo actuador.
13. Un sistema de control, particularmente adecuado para una embarcación como se describió en cualquiera de las reivindicaciones 1-11, cuyo sistema de control incluye un procesador que se dispone para:
- recibir datos del sensor de movimiento de los movimientos con relación a al menos un elemento en un área objetivo;
- proporcionar una primera señal de accionamiento para accionar un número de primeros actuadores para mover al menos un portador para soportar, mover y/o transferir una carga, y
- proporcionar una segunda señal de accionamiento para accionar al menos un segundo actuador para mover una pasarela conectada giratoriamente al portador.
14. Un método para compensar los movimientos de una embarcación, que comprende las etapas de:
- medir los movimientos con relación a al menos un elemento en un área objetivo;
- accionar un número de primeros actuadores para mover un portador con relación a la embarcación, y
- accionar al menos un segundo actuador para mover una pasarela que se conecta giratoriamente al portador.
15. Un método de acuerdo con la reivindicación 14, en donde las etapas de accionamiento del número de primeros actuadores y el al menos un segundo actuador se llevan a cabo en respuesta a las mediciones de movimiento.
16. Un método de acuerdo con la reivindicación 14 o 15, en donde la plataforma de compensación de movimientos es una plataforma Stewart.
17. Un método de acuerdo con cualquiera de las reivindicaciones anteriores 14-16, en donde la etapa de medición incluye medir los movimientos de la embarcación, la plataforma y/o la pasarela, preferentemente el segundo extremo de la pasarela, con relación al al menos un elemento en un área objetivo.
18. Un producto de programa de computadora para compensar los movimientos de una embarcación, cuyo producto de programa de computadora comprende instrucciones para provocar que un procesador lleve a cabo las etapas de:
- recibir datos del sensor de movimiento de los movimientos con relación a al menos un elemento en un área objetivo;
- proporcionar una primera señal de accionamiento para accionar un número de primeros actuadores para mover un portador con relación a la embarcación, y
- proporcionar un segunda señal de accionamiento para accionar al menos un segundo actuador para mover una pasarela que se conecta giratoriamente al portador
Patentes similares o relacionadas:
 Bastidor anti torsión, buque y procedimiento para hacer descender un objeto en una extensión de agua, del 27 de Mayo de 2020, de Jumbo Maritime B.V: Procedimiento para hacer descender un objeto en una extensión de agua desde un buque que flota sobre la extensión de agua, comprendiendo el buque un primer […]
Bastidor anti torsión, buque y procedimiento para hacer descender un objeto en una extensión de agua, del 27 de Mayo de 2020, de Jumbo Maritime B.V: Procedimiento para hacer descender un objeto en una extensión de agua desde un buque que flota sobre la extensión de agua, comprendiendo el buque un primer […]
Sistema para transporte de personas y/o mercancías por medio de una lanzadera, del 10 de Julio de 2019, de Hallcon b.v: Un sistema para transportar personas y/o mercancías que comprende: - una lanzadera que está provista en el lado superior de medios desmontables para elevar la […]
Embarcación de abastecimiento mar adentro, del 12 de Junio de 2019, de Kongsberg Maritime CM AS: Barco de abastecimiento mar adentro para trasporte de cargamento, que comprende una, en lo principal, cubierta abierta , varios tanques de cargamento que […]
Un método para transportar a una persona de una primera posición con respecto a una embarcación a una segunda posición con respecto a la embarcación, un dispositivo para el transporte de la persona, y un sistema y una embarcación que comprenden el dispositivo, del 24 de Abril de 2019, de Coöperatieve Vereniging Offshore Cooperation U.A: Un procedimiento para transportar una persona de una primera posición respecto a una embarcación a una segunda posición respecto a la embarcación , mediante […]
Buque de carga de mercancía y procedimiento de realización del mismo, del 27 de Febrero de 2019, de HYUNDAI HEAVY INDUSTRIES CO., LTD: Buque de carga de mercancía que comprende: una pluralidad de paredes laterales que se proyectan hacia un lado superior […]
MECANISMO LIMITADOR DE LA CARGA DE UNA GRÚA EN UNA EMBARCACIÓN, del 22 de Noviembre de 2018, de INDUSTRIAS GUERRA, S.A: Mecanismo limitador de la carga de una grúa en una embarcación, donde la grúa comprende un brazo con prolongaciones hidráulicas y una columna de giro […]
Mecanismo limitador de la carga de una grúa en una embarcación, del 3 de Octubre de 2018, de INDUSTRIAS GUERRA, S.A: Mecanismo limitador de la carga de una grúa en una embarcación, donde la grúa comprende un brazo y una columna de giro unida a la embarcación, […]
Embarcación que comprende una grúa, del 1 de Abril de 2015, de IHC Holland IE B.V: Embarcación que comprende una grúa , estando conectada la grúa a una cubierta de la embarcación, comprendiendo la grúa - un bastidor […]