DISPOSITIVOS ROBOTICOS.
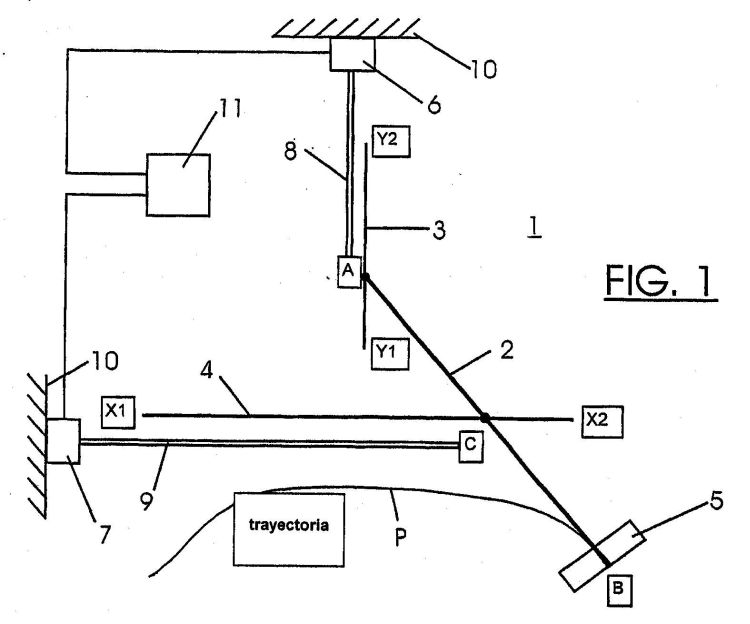
Dispositivo robótico (1) que comprende: a. una primera pista (3) que se extiende entre un primer y un segundo puntos de extremo (Y1,
Y2); b. una segunda pista (4), no paralela a la primera pista (3), que se extiende entre un tercer y un cuarto puntos de extremo (X1, X2); c. un primer soporte (A) montado para moverse a lo largo de dicha primera pista (3) entre dichos primer y segundo puntos de extremo (Y1, Y2); d. un segundo soporte (C) montado para moverse a lo largo de dicha segunda pista (4) entre dichos tercer y cuarto puntos de extremo (X1, X2); e. medios de accionamiento (6, 7) para conducir dichos primer y segundo soportes (A, C) a lo largo de sus respectivas pistas (3, 4) entre sus respectivos puntos de extremo (X1, X2 y Y1, Y2); y f. un brazo robótico (2) montado de forma pivotante sobre dicho primer soporte (A) en una primera ubicación de dicho brazo (2), y montado de forma pivotante sobre dicho soporte (C) en una segunda ubicación sobre dicho brazo (2), separado de dicha primera ubicación, de forma tal que el movimiento de dichos soportes (A, C) a lo largo de dichas pistas (3, 4) produce el movimiento de dicho brazo robótico (2); caracterizado por el hecho de que dicho brazo robótico (2) está montado de forma tal que puede deslizarse respecto a uno de dichos primer y segundo soportes (A, C).
Tipo: Resumen de patente/invención.
Solicitante: QUIN SYSTEMS LIMITED.
Nacionalidad solicitante: Reino Unido.
Dirección: OAKLANDS BUSINESS CENTRE, OAKLANDS PARK,WORKINGHAM, BERKSHIRE RG41.
Inventor/es: WEBB,MICHAEL JAMES MORLEY, RAGAVAN,JAYAN.
Fecha de Publicación: .
Clasificación PCT:
- B25J1/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores movidos en el espacio manualmente (del tipo control dominado B25J 3/00; micromanipuladores B25J 7/00).
- B25J9/02 B25J […] › B25J 9/00 Manipuladores de control programado. › caracterizado por el movimiento de los brazos, p. ej. del tipo coordenadas cartesianas (B25J 9/06 tiene prioridad).
- B25J9/16 B25J 9/00 […] › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
- B25J9/18 B25J 9/00 […] › eléctricos.
- G05B19/41 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › caracterizado por la interpolación, p. ej. por el cálculo de puntos intermedios entre los puntos extremos programados para definir el recorrido a seguir y la velocidad del desplazamiento a lo largo de ese recorrido (G05B 19/25, G05B 19/31, G05B 19/37, G05B 19/39, G05B 19/40 tienen prioridad).
Patentes similares o relacionadas:
Método y aparato de colocación de pieza de trabajo, del 4 de Marzo de 2020, de MBDA UK LIMITED: Un método para colocar relativamente un circuito integrado y el eje de propagación de un láser u otro haz de energía dirigida durante el mapeo […]
 Sistema de supervisión y ayuda de las operaciones manuales de ensamblado industrial mediante realidad aumentada y procedimiento de uso, del 17 de Diciembre de 2014, de PROYECTOS, INGENIERÍA Y GESTIÓN, SOCIEDAD ANÓNIMA (P.R.O.I.N.G.E., S.A.): La invención es un sistema de supervisión y ayuda de las operaciones manuales de ensamblado industrial mediante realidad aumentada que comprende un bastidor , […]
Sistema de supervisión y ayuda de las operaciones manuales de ensamblado industrial mediante realidad aumentada y procedimiento de uso, del 17 de Diciembre de 2014, de PROYECTOS, INGENIERÍA Y GESTIÓN, SOCIEDAD ANÓNIMA (P.R.O.I.N.G.E., S.A.): La invención es un sistema de supervisión y ayuda de las operaciones manuales de ensamblado industrial mediante realidad aumentada que comprende un bastidor , […]
Método de generación de pasos de cinta y aparato para programar una máquina de estratificación de cinta compuesta, del 9 de Octubre de 2013, de THE BOEING COMPANY: Un método implementado por ordenador para definir un paso de cinta compuesta para formar al menos unaporción de una capa de una pieza compuesta, que comprende: aproximar […]
PROCEDIMIENTO Y DISPOSITIVO PARA VARIAR EL INTERVALO DE INTERVENCION DE UN UTIL EN UNA BANDA DE MATERIAL PASANTE., del 1 de Marzo de 2007, de REXROTH INDRAMAT GMBH: Procedimiento para la variación del intervalo de intervención de un útil , dispuesto en posición no radial en al menos un cilindro rotativo asignado […]
MAQUINA DE ELECTROEROSION CON ALAMBRE Y PROCEDIMIENTO PARA SU FUNCIONAMIENTO., del 16 de Abril de 2005, de AGIE SA: LA INVENCION SE REFIERE A UN PROCEDIMIENTO PARA MOVER CABEZALES DE GUIA , EN SU CASO DE UNA PIEZA DE TRABAJO , DE UNA MAQUINA DE ELECTROEROSIONADO POR ALAMBRE A LO […]
PROCEDIMIENTO PARA LA MECANIZACION DE PIEZAS DE TRABAJO POR LEVANTAMIENTO DE MATERIAL., del 16 de Abril de 2003, de EIDGENISSISCHE TECHNISCHE HOCHSCHULE ZURICH: Procedimiento para mecanización por levantamiento de material de la superficie de una pieza de trabajo con una herramienta, donde la herramienta está guiada sobre la pieza […]
PROCEDIMIENTO PARA GENERAR VALORES TEORICOS PARA UNA MAQUINA CONTROLADA NUMERICAMENTE., del 16 de Abril de 2003, de ROBERT BOSCH GMBH: Procedimiento para generar valores teóricos para una máquina controlada numéricamente a lo largo de una curva de intersección preferentemente tridimensional, que aparece […]
SISTEMA DE PRODUCCION VERSATIL., del 16 de Diciembre de 2001, de PFU LIMITED: LA PRESENTE INVENCION HACE REFERENCIA A UN SISTEMA DE PRODUCCION VERSATIL Y UN METODO PARA OPERAR EL SISTEMA. EL PRESENTE SISTEMA ESTA RELACIONADO EN PARTICULAR CON LOS METODOS […]