DISPOSITIVO, SISTEMA Y MÉTODO DE SEÑALIZACIÓN VIAL.
Dispositivo, sistema y método de señalización vial.
Se describe un dispositivo,
un sistema que comprende dicho dispositivo y un vehículo para su despliegue que permiten implementar un método de señalización vial que evita la intervención de personas, evitando de esta manera siniestros y riesgos que pueden ocurrir durante operaciones de señalización vial como pueden ser cortes selectivos de carriles en vías. El sistema de la invención comprende dos elementos que trabajan de forma asociada por una parte una serie de dispositivos, en realidad se hará uso de más de uno generando lo que denominamos conos ya que los dispositivos tienen preferiblemente esa forma externa de cono; por otra parte se describe en este documento el vehículo que distribuye y coloca dichos dispositivos, estando el vehículo y dispositivos de señalización asociados mediante medios de comunicación y medios de geolocalización preferiblemente instalados en el vehículo, si bien alguno de los dispositivos pueden llevarlos incorporados.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201330328.
Solicitante: ALVAC, S.A.
Nacionalidad solicitante: España.
Inventor/es: ALONSO RAMOS,VÍCTOR, GONZÁLEZ ALONSO,Ignacio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60Q7/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60Q DISPOSICION DE DISPOSITIVOS DE SEÑALIZACION O ILUMINACION, SU MONTAJE O SOPORTE, SUS CIRCUITOS, PARA VEHICULOS EN GENERAL. › Disposición o adaptación de dispositivos portátiles de señalización de emergencia sobre vehículos.
- E01F9/012
- G08G1/09 FISICA. › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › Disposiciones para dar instrucciones variables para el tráfico.
Fragmento de la descripción:
Dispositivo, sistema y método de señalización vial.
OBJETO DE LA INVENCIÓN 5
La presente invención está dirigida a al campo de la señalización y balizamiento vial.
La presente invención permite delimitar carriles y zonas de obras en vías mediante la disposición de elementos señalizadores móviles e inteligentes a modo de conos que 10 comprende una serie de elementos electrónicos.
ANTECEDENTES DE LA INVENCIÓN
Con frecuencia, la ordenación de la circulación motivada por la presencia de una zona fija de 15 obras requiere el cierre de uno o más carriles a la circulación, y/o el desvío de ésta a carriles provisionales, generalmente paralelos a los originales.
Los vehículos que transiten por un carril que se vaya a cerrar deberán:
- Converger con los de un carril contiguo del mismo sentido 20
- Desviarse a otro carril provisional -Efectuar sucesivamente las dos maniobras anteriores.
Cuando sólo se cierre un carril a la circulación, éste podrá ser interior o exterior, y los vehículos que por él transiten deberán converger con los del carril contiguo del mismo 25 sentido. El cierre del carril se hará disminuyendo linealmente su anchura, de forma que la cotangente del ángulo formado por la línea inclinada de cierre del carril con el eje de la vía no sea menor de VL/1.6, siendo VL (km/h) la velocidad límite de los vehículos al principio del cierre del carril.
Cuando se cierren sucesivamente dos o más carriles, se aplicará la regla anterior en tantas 30 fases como carriles se cierren manteniendo entre cada dos fases consecutivas un tramo de vía de anchura constante, cuya longitud (m) no deberá ser inferior a VL/0.8, siendo VL (km/h) la velocidad limitada de los vehículos al principio de dicho tramo de anchura constante.
Normalmente este tipo de operaciones se realizan manualmente con personas que van colocando cada cono - dispositivo de balizamiento- en una posición concreta en relación con el carril que se quiere manipular, esto conlleva un alto riesgo para los operarios pues se producen accidentes y a la vista está la siniestralidad que se da durante este tipo de tareas.
DESCRIPCIÓN DE LA INVENCIÓN
La invención aquí descrita presenta una solución al problema anteriormente planteado de señalización y balizado de vías de forma automática y precisa sin hacer uso, y arriesgar, operarios durante su utilización para, por ejemplo, un corte selectivo de un carril en una vía. 45 Con ello se evita la problemática actual que existe en el mantenimiento de carreteras, con una alta siniestralidad laboral. Se desarrollará un enjambre de conos y dispositivos de señalización que modificarán su ubicación en función de dónde esté situado el robot coordinador denominado robot-guía. De esta forma, se señalizará constantemente de forma segura y apropiada la zona de la carretera en la que se están llevando a cabo labores de 50 mantenimiento.
Para ello se describe un sistema robotizado autónomo capaz de realizar las tareas de señalización y balizamiento mediante el despliegue controlado y selectivo de dispositivos señalizadores específicos que se describen a continuación.
La invención comprende dos elementos que trabajan de forma asociada. Por una parte una serie de dispositivos señalizadores o balizas robotizadas, cuyo número dependerá de la situación y conformarán el denominado "enjambre de conos" ya que los dispositivos tienen 5 preferiblemente esa forma externa de cono; por otra parte se describe en este documento el vehículo que distribuye y coloca dichos dispositivos, estando el vehículo y dispositivos de señalización asociados mediante medios de comunicación y de geolocalización. Estos equipos van preferiblemente instalados en el vehículo, si bien algunos pueden ir instalados en los dispositivos... 10
El primer dispositivo o robot-guía es el primero en ser depositado por el vehículo y el resto de dispositivos pueden modificar su ubicación en función de dónde esté situado dicho robot-guía de manera automática. Esto se debe a que cada dispositivo tiene capacidad de actuar en función de su entorno ya que va equipado con sensores y/o cámaras que pueden "ver" el 15 entorno, realizando capturas de imágenes (estáticas o en movimiento) del entorno y procesándolas mediante un unidad de proceso que comprende cada dispositivo; de esta forma, se señalizará mediante la deposición controlada de dispositivos y el posicionamiento de los mismo de forma autónoma y auto-gestionada, constantemente de forma segura y apropiada la zona de la carretera en la que se están llevando a cabo labores de 20 mantenimiento.
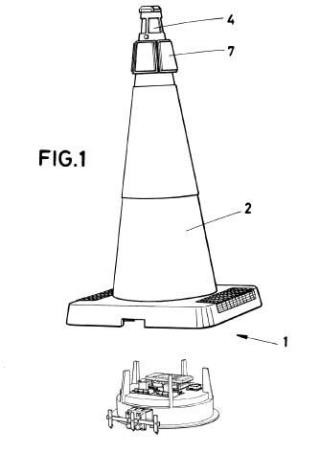
El dispositivo en forma de cono está compuesto por dos partes, una carcasa exterior que cumple con la normativas vigentes que regulan dicho tipo de señalizaciones; para ello el dispositivo lleva incorporada una banda reflectante en todo su contorno así como unas 25 balizas de LEDs que se encenderán de forma automática en función de la luminosidad existente así como de manera manual en función de las necesidades. Dado que el dispositivo permanecerá a la intemperie éste presenta un elemento de encapsulamiento destinado a proteger al menos el interior del cuerpo (2) de agentes externos tales como agua En la parte inferior del dispositivo se encuentra implementada toda la parte móvil del 30 mismo así como los mecanismos y módulos necesarios para su funcionamiento, estos elementos quedan ocultos por la carcasa exterior dejando una altura libre entre la carcasa exterior y el suelo de aproximadamente 5 cm para facilitar el desplazamiento del dispositivo.
Cada dispositivo, o al menos el dispositivo robot guía, tiene capacidad de detectar marcas 35 viales longitudinales tanto de separación de carriles como de borde de calzada, con ello se consigue evitar la invasión de carriles abiertos al tráfico. Para dicha detección se hace uso de sensores, como pueden ser cámaras específicas que capturan imágenes que luego son procesadas por una unidad de proceso.
De esta manera una vez detectados los carriles, el primer dispositivo denominado robot-guía se posiciona y el resto de dispositivos se posicionan en función de éste, dado que la ubicación original de cada uno de ellos ha sido marcada y determinada al depositarlos mediante el módulo de geolocalización del vehículo usado para su despliegue. Para poder conocer en todo momento la posición de los dispositivos cualquier cambio de su posición 45 deber ser comunicado a dicho vehículo. Para ello cada dispositivo tiene un módulo de comunicaciones inalámbricas que permite enviar y recibir datos e información - en este caso referido a posición pero pueden ser otros- al vehículo. De esta manera se tiene constancia en tiempo real de dónde está cada dispositivo y vehículo. Con los datos determinados en la imagen procesada se genera una orden de movimiento que comprende datos de la posición 50 actual y de la posición final en función de los elementos determinados, es decir que tiene en cuenta el posicionamiento respecto a carriles, líneas, obstáculos u otros dispositivos; dicha orden de desplazamiento es ejecutada por los distintos módulos de desplazamiento de cada dispositivo; esto se puede llevar de forma autónoma, es decir, cada dispositivo determina los elementos anteriormente citados y él mismo realiza todo el proceso de movimiento, o bien de forma manual, siendo un agente externo quien opera y controla el movimiento del dispositivo de forma remota.
DESCRIPCIÓN DE LOS DIBUJOS 5
Éstas y otras características y ventajas de la invención, se pondrán más claramente de manifiesto a partir de la descripción detallada que sigue de las formas preferidas de realización, dadas únicamente a título de ejemplo ilustrativo y no limitativo, con referencia a las figuras que se acompañan.: 10
Figura 1 En esta figura se muestra una vista en perspectiva del dispositivo objeto de la invención.
Figura 2 En esta figura se muestra una vista en perspectiva del módulo de desplazamiento 15 del dispositivo.
Figura 3 En esta figura se muestra una vista en perspectiva del módulo de desplazamiento del dispositivo con los medios de fijación al cuerpo montados sobre él.
Figura 4 En esta figura se muestra una vista en perspectiva del vehículo portador cargado de dispositivos en una primera posible realización del mismo.
Figura 5 En esta figura se muestra una vista en perspectiva del vehículo portador cargado de dispositivos en una segunda posible realización del mismo. 25
REALIZACIÓN PREFERENTE DE LA INVENCIÓN
En una realización preferida del objeto de la invención se procede a balizar y señalizar una zona en la que se lleva a cabo...
Reivindicaciones:
1. Dispositivo (1) de señalización vial que comprende un cuerpo (2) hueco caracterizado porque comprende en el interior del cuerpo (2) y conectados entre sí:
una unidad de proceso (8) destinada a generar órdenes para operar el dispositivo 5 (1) ,
unos medios de suministro de energía (9) autónomos y recargables,
un módulo de desplazamiento (3) que comprende un módulo de control conectado a la unidad de proceso (8) destinado a controlar movimientos del dispositivo (1) ,
un módulo de visión artificial (4) destinado a captar al menos una imagen del entorno 10 del dispositivo (1) y hacerla llegar al menos a la unidad de proceso (8) , y
un módulo de comunicaciones (5) adaptado para establecer al menos un canal de comunicación para trasmisión de datos.
2. Dispositivo (1) según reivindicación 1 caracterizado porque adicionalmente 15 comprende unos medios de señalización lumínica (7) destinados a emitir señales luminosas.
3. Dispositivo (1) según reivindicación 2 caracterizado porque los medios de señalización lumínica (7) se encuentran ubicados en una parte superior del dispositivo (1) .
4. Dispositivo (1) según reivindicación 1 caracterizado porque el módulo de desplazamiento (3) comprende:
- al menos un motor, y
- una transmisión que comprende al menos una rueda con neumático.
5. Dispositivo (1) según reivindicación 1 caracterizado porque el módulo de visión artificial (4) comprende al menos una cámara digital que a su vez comprende al menos una lente y sensor de obtención de imágenes.
6. Dispositivo (1) según reivindicación 1 caracterizado porque el módulo de 30 comunicaciones (5) comprende al menos un elemento habilitador de comunicaciones inalámbricas.
7. Dispositivo (1) según reivindicación 1 caracterizado porque comprende al menos un elemento de encapsulamiento destinado a proteger al menos el interior del cuerpo (2) de 35 agentes externos tales como agua.
8. Sistema de señalización vial caracterizado porque comprende al menos un vehículo (20) asociado a al menos un dispositivo (1) como el descrito en las reivindicaciones 1 a 7, vehículo (20) caracterizado porque comprende un elemento geolocalizador (6) destinado a 40 obtener al menos datos referidos a la localización y/o posición del dispositivo (1) .
9. Método de señalización vial que hace uso del sistema de la reivindicación 8 caracterizado porque comprende:
depositar al menos un dispositivo (1) que se encuentra en el vehículo (20) , 45
determinar una posición de deposición del dispositivo (1) mediante el elemento geolocalizador (6) del vehículo (20) ,
realizar un captura de datos del entorno del dispositivo (1) mediante el módulo de visión artificial (4) , donde dicha captura comprende al menos una imagen,
hacer llegar la imagen a la unidad de proceso (8) , 50
pre-procesar dicha imagen en el dispositivo (1) mediante la unidad de proceso (8) ,
hacer llegar el resultado de la etapa anterior a un ordenador central accesible por el dispositivo (1) ,
procesar en el ordenador central la imagen recibida pare determinar en la imagen al menos uno de los siguientes elementos:
- carriles, -líneas de carril, - obstáculos, y 5
-otros dispositivos (1)
generar al menos una orden de movimiento que comprende datos de la posición actual y de la posición final en función de los elementos determinados,
enviar la orden al módulo de desplazamiento (3) , y
ubicar el dispositivo en la posición final mediante el módulo de desplazamiento (3) . 10
10. Método según reivindicación 9 caracterizado porque adicionalmente comprende modificar la posición de al menos un dispositivo (1) en función de al menos uno de los elementos determinados como resultado del proceso de imagen.
Patentes similares o relacionadas:
Sistema de control de circulación, del 29 de Abril de 2020, de LOPEZ PEREZ, Alvaro Javier: 1. Sistema de control de circulación en una vía con una señalética de limitación de la velocidad, configurable en remoto desde una o más centralitas […]
 Sistema de alimentación de energía para vehículos y vehículo de tracción eléctrica, del 25 de Diciembre de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un sistema de alimentación de energía para vehículos para la alimentación de energía eléctrica desde una unidad de transmisión de energía de un dispositivo de […]
Sistema de alimentación de energía para vehículos y vehículo de tracción eléctrica, del 25 de Diciembre de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un sistema de alimentación de energía para vehículos para la alimentación de energía eléctrica desde una unidad de transmisión de energía de un dispositivo de […]
SISTEMA DE CONDUCCIÓN ASISTIDA BASADO EN UNA RED DE COMUNICACIÓN DE ONDA MILIMÉTRICA Y DETECCIÓN DE OBJETOS POR TÉCNICAS RADAR, del 27 de Junio de 2019, de KITAZAWA MOLINA, Elvia Isabel: La presente invención describe un sistema de integración de componentes en vehículos y un método de operación de los mismos que posibilita al conductor […]
 Sistema de compartición de informaciones que utiliza unos sensores de higrometría y de temperatura de calzada, del 29 de Mayo de 2019, de Dreamsafe: Sistema de recogida y de puesta a disposición de informaciones que se refieren al riesgo de helada y/o de formación de placas de hielo sobre la red de carreteras, comprendiendo […]
Sistema de compartición de informaciones que utiliza unos sensores de higrometría y de temperatura de calzada, del 29 de Mayo de 2019, de Dreamsafe: Sistema de recogida y de puesta a disposición de informaciones que se refieren al riesgo de helada y/o de formación de placas de hielo sobre la red de carreteras, comprendiendo […]
Sistema y método para monitorear y mejorar el comportamiento de un/a conductor/a, del 20 de Mayo de 2019, de ORBCOMM LLC: Un método para proporcionar retroalimentación a los/las conductores/as, que comprende: monitorear parámetros de vehículo seleccionados mientras se conduce un vehículo […]
Método de asistencia a la conducción, dispositivo de asistencia a la conducción y sistema de asistencia a la conducción, del 27 de Marzo de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un método de asistencia a la conducción, incluyendo: un paso de detección de información posicional que consiste en detectar información posicional acerca […]
Sistema y métodos para el soporte de vehículos autónomos por medio de la percepción ambiental y calibración y verificación de sensores, del 6 de Marzo de 2019, de Signify Holding B.V: Un sistema de soporte para vehículo autónomo caracterizado por que comprende: una red de iluminación que tiene: una pluralidad de unidades […]
DISPOSITIVO DE SEÑALIZACIÓN, del 3 de Enero de 2019, de QUIROGA FERNANDEZ, Carlos: Dispositivo de señalización para transmisión de información en tiempo real, que comprende un elemento de iluminación insertable en un suelo y una […]