DISPOSITIVO Y MÉTODO DE MEDIDA DE LAS CARACTERÍSTICAS VISCO-ELÁSTICAS DEL TRICEPS SURAL POR LA VIBRACIÓN LIBRE LONGITUDINAL DEL SEGMENTO TIBIAL.
Dispositivo de medida de las características visco-elásticas del triceps sural por la vibración libre longitudinal del segmento tibial del tipo basado en la asociación de la vibración del segmento tibial con el individuo sentado y el arco metatarsal apoyado en una plataforma de medida de fuerza,
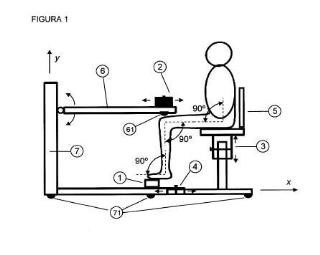
a la vibración libre de un sistema con un grado de libertad, siendo dicho grado, en este caso, el desplazamiento vertical del segmento tibial que comprende, al menos: una primera célula de carga (1), una segunda pesa de masa M (2), un asiento regulable en altura (3), un elemento de regulación de la posición del equipo en la dirección x (4), un elemento de respaldo (5), una viga articulada (6) y un bastidor (7).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200901235.
Solicitante: UNIVERSIDAD DE SEVILLA.
Nacionalidad solicitante: España.
Inventor/es: CAÑAS DELGADO,JOSE, PARIS CARBALLO,FEDERICO, BARROSO CARO,ALBERTO, CAÑAS DELGADO,Antonio, RIBAS SERNA,Juan, PARÍS GARCÍA,Federico.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B5/11 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 5/00 Medidas encaminadas a establecer un diagnóstico (diagnóstico por medio de radiaciones A61B 6/00; diagnóstico por ondas ultrasónicas, sónicas o infrasónicas A61B 8/00 ); Identificación de individuos. › Medida del movimiento del cuerpo entero o de partes del mismo, p. ej. temblor de la cabeza o de las manos, movilidad de un miembro (para medida del pulso A61B 5/02).
Fragmento de la descripción:
Dispositivo y método de medida de las características visco-elásticas del tríceps sural por la vibración libre longitudinal del segmento tibial.
El objeto de la presente invención es un dispositivo y método para la medida en vivo, mediante un método no invasivo de las propiedades visco-elásticas del tríceps sural, basándose en la asociación de la vibración del segmento tibial con un individuo sentado y su arco metatarsal apoyado en una plataforma de medida de fuerza, a la vibración libre de un sistema de un grado de libertad, siendo dicho grado de libertad, en este caso, el desplazamiento vertical del segmento tibial.
Antecedentes de la invención
Se han localizado distintos documentos relacionados con la determinación de propiedades mecánicas de músculos que muestran el interés por la fabricación de máquinas y dispositivos que permitan caracterizar dichas propiedades para el seguimiento del estado de entrenamiento y/o recuperación del tono muscular tras un estado de inactividad derivado de operaciones o lesiones.
Así pues, la PCT WO 02/19907 describe un sistema de cuantificación del tono muscular, en donde se obtienen propiedades de rigidez, viscosidad e inercia de los músculos asociados al giro de la muñeca mediante solicitaciones no sinusoidales. La PCT WO 2006/081366 describe un método y un aparato para monitorizar el funcionamiento del músculo basado en un índice obtenido de una señal de presión o fuerza. Otros sistemas equivalentes son los descritos por los documentos WO 2008/116227, WO 99/07280 y US 6132385. Ninguno de estos elementos refleja el objeto de la invención descrito.
La determinación de las propiedades de rigidez y viscosidad de un sistema músculo-tendón mediante la técnica de vibración libre ha sido mencionada y estudiada en algunas publicaciones. Por lo general, las diferentes técnicas propuestas para la determinación de las propiedades mecánicas de músculo y tendón, ajustan ciertos resultados experimentales a los parámetros que describen el comportamiento del sistema músculo-tendón.
De entre las propuestas que utilizan la vibración libre cabe destacar el trabajo de S. Fukashiro et al.“In vivo determination of muscle viscoelasticity in the human leg” que, con el sujeto sentado, y un peso variable sobre la rodilla, con apoyo genérico en el antepié, solicitan el sistema sóleo-tendón mediante un impacto sobre el peso, que hace que se produzca una oscilación, alrededor de un valor medio, de la carga que atraviesa el sistema sóleo-tendón que se registra mediante un diagrama fuerza-tiempo, y que permite determinar las rigideces del músculo y el tendón, así como el amortiguamiento aparente del sistema.
Descripción de la invención
En un primer aspecto de la invención el dispositivo de medida de las características visco-elásticas del tríceps sural por la vibración libre longitudinal del segmento tibial del tipo basado en la asociación de la vibración del segmento tibial con el individuo sentado y el arco metatarsal apoyado en una plataforma de medida de fuerza, a la vibración libre de un sistema con un grado de libertad, siendo dicho grado, en este caso, el desplazamiento vertical del segmento tibial que comprende, al menos: una primera célula de carga, una segunda pesa de masa M, un asiento regulable en altura, un elemento de regulación de la posición del equipo en la dirección x, un elemento de respaldo, una viga articulada y un bastidor.
En un segundo aspecto, el método de medida de las características visco-elásticas del tríceps sural por la vibración libre longitudinal del segmento tibial del tipo basado en la asociación de la vibración del segmento tibial con el individuo sentado y el arco metatarsal apoyado en una plataforma de medida de fuerza, a la vibración libre de un sistema con un grado de libertad, siendo dicho grado, en este caso, el desplazamiento vertical del segmento tibial implementado en el dispositivo anterior que comprende las siguientes etapas:
(i) una primera etapa de ensayo en el dispositivo anterior para una pluralidad de pesos y registrando las diferentes evoluciones de la fuerza con el tiempo;
(ii) una segunda etapa de evaluar los diferentes parámetros que definen la respuesta del modelo de un grado de libertad, mediante un procedimiento de ajuste por mínimos cuadrados, entre los resultados obtenidos experimentalmente y el modelo matemático que describe la vibración libre del sistema músculo-tendón y que queda determinado por una pluralidad de parámetros que se obtienen del proceso de ajuste; y
(iii) una tercera etapa de procedimiento de ajuste para obtener los valores de rigidez, una vez encontrados los parámetros del modelo de un grado de libertad que mejor ajustan las evoluciones registradas de la fuerza transmitida a la plataforma; dichos procedimientos alternativos de ajuste comprendiendo:
(a) ajuste por mínimos cuadrados en rigideces para obtener los valores de rigidez de soleo y tendón por separado;
(b) ajuste por mínimos cuadrados, igual que en rigideces, pero ajustando la recta de flexibilidades en vez de la curva de rigideces, mediante la minimización del error cuadrático;
(c) ajuste por flexibilidades que emplea el valor absoluto del error en vez del error cuadrático, dado que se ve menos afectado en el proceso de ajuste por la presencia de valores que se alejan mucho del modelo;
(d) un tercer método de ajustes en flexibilidades emplea el procedimiento de Tukey de regresión lineal, basado en las medianas como estimador más robusto que la media; y
(e) una variante del ajuste por mínimos cuadrados, pero truncando la serie de puntos empleados para el ajuste de manera iterativa en donde en un primer ajuste se emplean todos los puntos y se elimina el que presente un residuo mayor a la recta de ajuste, y una vez eliminado ese punto, se recalcula la recta de ajuste por mínimos cuadrados y se repite el procedimiento, hasta eliminar la mitad de los puntos, lo cual garantiza errores asociados a los valores aberrantes (errores de medida experimental que perturban el ajuste al modelo matemático) .
Las mejoras que proporciona este procedimiento son, por un lado que se trata de un procedimiento cien por cien no invasivo. El procedimiento y por ende los resultados son independientes del sujeto. En otras pruebas para medir el estado de forma de un sujeto (carreras, levantamiento de peso, etc.) el sujeto puede de forma voluntaria interferir sobre los resultados. En el procedimiento que se ha desarrollado la voluntad del sujeto es ajena a la determinación de las propiedades que se miden.
El procedimiento que se ha desarrollado es muy rápido. Ello es posible gracias al desacoplamiento entre la realización de las medidas y el proceso de manipulación de la información. Una de las pruebas de que consta el procedimiento dura entre 20 y 30 segundos y el proceso total del orden de unos 10 minutos.
El equipo desarrollado es fácilmente portable, lo que facilita su desplazamiento a centros de de entrenamiento de deportistas para poder hacer realizar controles periódicos con mínima alteración de hábitos y horarios. Además, es de coste reducido, lo que se ha conseguido gracias al empleo de desarrollos propios, reduciendo al mínimo la adquisición de equipos comerciales.
Breve descripción de las figuras
A continuación se pasan a describir de manera muy breve las figuras que ayudan a comprender mejor la invención y que se relacionan expresamente con una realización de dicha invención que se presenta como un ejemplo no limitativo de ésta.
Fig. 1 muestra la disposición del ensayo, sumarizándose la posición del individuo así como aquellas características del ensayo que son de especial relevancia, como los ángulos de 90 grados de las articulaciones de la rodilla y del pie antes de producir el impacto.
Fig. 2 muestra una huella plantar con los puntos principales a tener en cuenta en el método desarrollado en la presente invención.
Realización preferente de la invención
Como ha sido comentado anteriormente, la presente invención tiene por objeto el desarrollo de un dispositivo y método de medida en vivo, por un procedimiento cien por cien no invasivo, de las propiedades viscoelásticas del tríceps sural.
Dicho método...
Reivindicaciones:
1. Dispositivo de medida de las características visco-elásticas del tríceps sural por la vibración libre longitudinal del segmento tibial del tipo basado en la asociación de la vibración del segmento tibial con el individuo sentado y el arco metatarsal apoyado en una plataforma de medida de fuerza, a la vibración libre de un sistema con un grado de libertad, siendo dicho grado, en este caso, el desplazamiento vertical del segmento tibial caracterizado porque comprende, al menos
(a) una célula de carga (1) configurada para capturar la señal de presión debajo del pie una vez se ha producido el impacto;
(b) una pesa de masa M (2) configurada para acentuar el movimiento de la antepierna en el sentido del eje y de acuerdo con un modelo de masas concentradas de un grado de libertad;
(c) un asiento regulable en altura (3) en la dirección del eje y, configurado para generar un primer ángulo recto en la rodilla entre la antepierna y el muslo y otro en el tobillo entre la antepierna y el pie;
(d) un elemento de regulación de la posición del equipo en la dirección x (4) configurado para ajustar en la dirección del eje x la posición del individuo para que el pie quede sobre la célula en la posición correcta y para que el ángulo de la antepierna y el muslo forme un ángulo de 90 grados;
(e) un elemento de respaldo (5) vertical rígido configurado para mantener la posición del sujeto y hace que el valor del ángulo entre espalda y muslo sea inalterable durante el ensayo;
(f) una viga articulada (6) configurada para permitir que el sistema de carga se adapte de forma sencilla a las características antropométricas del sujeto;
(g) un bastidor (7) constituido por una estructura horizontal en forma de T y un pilar, y descansa sobre el suelo a través de tres apoyos (71) situados en los extremos de la T.
2. Dispositivo de acuerdo con la reivindicación 1 en donde la célula de carga está fijada a un bastidor (7) y movida longitudinalmente en la dirección del eje x por un elemento de regulación (4) .
3. Dispositivo de acuerdo con las reivindicaciones1y2en donde el asiento regulable en altura (3) está configurado para habilitar desplazamientos en la dirección x, a través del elemento de regulación (4) en donde la correcta disposición del sujeto en la dirección z, para que el sistema que vibra lo haga en el plano xy.
4. Dispositivo de acuerdo con las reivindicaciones anteriores en donde las distancias involucradas en el ensayo quedan grabadas en el mismo para garantizar la repetibilidad del ensayo con el mismo individuo en días diferentes.
5. Dispositivo de acuerdo con las reivindicaciones anteriores en donde un extremo de la viga (6) está articulada y en el otro apoya sobre la rodilla; donde dicho contacto entre la viga y la rodilla se realiza a través de un dispositivo cilíndrico (61) alineado con el eje z, que garantiza la transmisión puntual en el plano xy, pero repartida en la dirección z; y donde la capacidad de desplazamiento de la masa (masa M (2) y elemento de contacto con la rodilla) en la dirección x, permite la adaptación del sistema a cualquier sujeto.
6. Método de medida de las características visco-elásticas del tríceps sural por la vibración libre longitudinal del segmento tibial del tipo basado en la asociación de la vibración del segmento tibial con el individuo sentado y el arco metatarsal apoyado en una plataforma de medida de fuerza, a la vibración libre de un sistema con un grado de libertad, siendo dicho grado, en este caso, el desplazamiento vertical del segmento tibial implementado en el dispositivo de las reivindicaciones1a5 caracterizado porque comprende las siguientes etapas:
(i) una primera etapa de ensayo en el dispositivo de las reivindicaciones 1 a 5, para una pluralidad de pesos y registrando las diferentes evoluciones de la fuerza con el tiempo;
(ii) una segunda etapa de evaluar los diferentes parámetros que definen la respuesta del modelo de un grado de libertad, mediante un procedimiento de ajuste por mínimos cuadrados entre los resultados obtenidos
experimentalmente y el modelo matemático
que des
cribe la vibración libre del sistema músculo-tendón y que queda determinado por cinco parámetros (ac, as, w, γ, m) que se obtienen del proceso de ajuste; y
(iii) una tercera etapa de procedimiento de ajuste para obtener los valores de rigidez, una vez encontrados los parámetros del modelo de un grado de libertad que mejor ajustan las evoluciones registradas de la fuerza transmitida a la plataforma.
7. Método de acuerdo con la reivindicación 6 en donde la tercera etapa del método comprende un ajuste por mínimos cuadrados en rigideces para obtener los valores de rigidez de soleo y tendón por separado.
8. Método de acuerdo con la reivindicación 6 en donde la tercera etapa del método comprende un ajuste por mínimos cuadrados, igual que en rigideces, pero ajustando la recta en vez de la curva de rigideces, mediante la mini
mización del error cuadrático de la ecuación .
9. Método de acuerdo con la reivindicación 6 en donde la tercera etapa del método comprende un ajuste por flexi
bilidades que emplea el valor absoluto del error
en vez del error cuadrático,
dado que se ve menos afectado en el proceso de ajuste por la presencia de valores que se alejan mucho del modelo.
10. Método de acuerdo con la reivindicación 6 en donde la tercera etapa del método comprende un ajuste por flexibilidades utilizando el procedimiento de Tukey de regresión lineal, basado en las medianas como estimador más robusto que la media.
11. Método de acuerdo con la reivindicación 6 en donde la tercera etapa del método comprende una variante del ajuste por mínimos cuadrados, pero truncando la serie de puntos empleados para el ajuste de manera iterativa en donde en un primer ajuste se emplean todos los puntos y se elimina el que presente un residuo mayor a la recta de ajuste, y una vez eliminado ese punto, se recalcula la recta de ajuste por mínimos cuadrados y se repite el procedimiento, hasta eliminar la mitad de los puntos, lo cual garantiza errores asociados a los valores aberrantes (errores de medida experimental que perturban el ajuste al modelo matemático) .
OFICINA ESPANOLA DE PATENTES Y MARCAS ESPANA
INFORME SOBRE EL ESTADO DE LA TECNICA
51 Int. Cl. A6185/11 (2006.01)
21 N.O solicitud: 200901235 22 Fecha de presentación de la solicitud: 18.05.2009 32 Fecha de prioridad:
DOCUMENTOS RELEVANTES
Categoria @ Documentos citados Reivindicaciones afectadas Y S. FUKASHIRO et al. "In vivo determination of muscle viscoelasticity in the human leg". Acta 1-11 Physiol Scand 2001, 172.
24. 248. Y US 5403251 A (BELSITO ANNE W et al.) 04.04.1995, 1-11 resumen; columna 6, line.
15. columna 28, linea 11; figuras. A 01.02.2006, J. TROY BLACKBURN et al. "Influences of experimental factors on spinal stretch 1-11 reflex latency and amplitude in the human triceps surae". Journal of electromyography and kinesiology 16 (2006.
4. 50. A 01.02.2006, J. TROY BLACKBURN et al. "Comparison of triceps surae structural stiffness and 1-11 material modulus across sex". Clinical biomechanics 21 (2006.
15. 167. Categoria de los documentos citados X: de particular relevancia Y: de particular relevancia combinado con otro/s de la misma categoria A: refleja el estado de la tecnica O: referido a divulgación no escrita P: publicado entre la fecha de prioridad y la de presentación de la solicitud E: documento anterior, pero publicado despues de la fecha de presentación de la solicitud El presente informe ha sido realizado º para todas las reivindicaciones º para las reivindicaciones nO: Fecha de realización del informe 14.03.2012 Examinador B. Tejedor Miralles Pagina 1/4
INFORME DEL ESTADO DE LA TECNICA
NO de solicitud: 200901235
Documentación minima buscada (sistema de clasificación seguido de los simbolos de clasificación) A61B Bases de datos electrónicas consultadas durante la busqueda (nombre de la base de datos y, si es posible, terminos de
busqueda utilizados) INVENES, EPODOC, WPI, NPL, INTERNET
Informe del Estado de la Tecnica Pagina 2/4
OPINION ESCRITA
NO de solicitud: 200901235
Fecha de Realización de la Opinión Escrita: 14.03.2012
Declaración
Novedad (Art. .1 LP 11/198 ) Reivindicaciones 1-11 SI Reivindicaciones NO Actividad inventiva (Art. 8.1 LP11/198 ) Reivindicaciones SI Reivindicaciones 1-11 NOSe considera que la solicitud cumple con el requisito de aplicación industrial. Este requisito fue evaluado durante la fase de examen formal y tecnico de la solicitud (Articulo 31.2 Ley 11/1986) .
Base de la Opinión.
La presente opinión se ha realizado sobre la base de la solicitud de patente tal y como se publica.
Informe del Estado de la Tecnica Pagina 3/4
OPINION ESCRITA
NO de solicitud: 200901235
1. Documentos considerados.
A continuación se relacionanlos documentos pertenecientes al estado de la tecnica tomados en consideración para la realización de esta opinión.
Documento Numero Publicación o Identificación Fecha Publicación D01 S. FUKASHIRO et al. 2001 D02 US 5403251 A (BELSITO ANNE W et al.) 04.04.1995 D03 J. TROY B LACKBURN et a l. Journal of e lectromyography and kinesiology. 01.02.2006 D04 J. TROY BLACKBURN et al. Clinical biomechanics 01.02.20062. Declaración motivada segun los articulos 29. y 29.7 del Reglamento de ejecución de la Ley 11/198 , de 20 de marzo, de Patentes sobre la novedad y la actividad inventiva; citas y explicaciones en apoyo de esta declaración
Reivindicación 1 (dispositivo) :
El documento de la tecnica mas cercano es el D01. Divulga dispositivo de medida de las caracteristicas visco-elasticas del triceps sural por la vibración libre longitudinal del segmento tibial del tipo basado enla asociación de l a vibración del segmento tibial con el individuo sentado y el arco metatarsal apoyado en una plataforma de medida de fuerza, a la vibración libre de un sistema con un grado de libertad, siendo dicho grado, en este caso, el desplazamiento vertical del segmento tibial que comprende una celula de carga, una pesa de masa M, un asiento, una viga articulada y un bastidor. Se diferencia en que el asiento no parece tener un respaldo vertical rigido ni es regulable en alturayno dispone de un elemento de regulación de la posición del equipo en el eje x. Las diferencias senaladas parecen responder a requisitos implicitos para el uso del dispositivo descrito en la primera reivindicación. El efecto tecnico que se consigue es poder mover los distintos elementos del dispositivo para lograr la posición adecuada del sujeto. El problema tecnico a resolver es cómo lograr la posición adecuada del sujeto bajo ensayo; es decir, que la cadera, la rodilla y la articulación del tobillo esten formando un angulo de 90O. El documento D02 divulga un sistema de posicionamiento de un paciente en una maquina de ejercicio que consta de un asiento con respaldo, regulable en altura y un actuador que puede moverse tanto a lo largo del eje x sobre un rail, como del eje z para adaptarse a las necesidades de posición del sujeto (figuras 1 y 3, columna 6, linea 15-columna 28, linea 11; D02) .Asi, un experto en la materia utilizaria dichas caracteristicas tecnicas para solucionar el problema tecnico planteado. Por lo tanto, la reivindicación1 no presenta actividad inventiva segun el articulo 8.1 de la ley de patentes 11/1986.
Reivindicaciones 2-5:
Las reivindicaciones 2 y 3 hacen referencia a los movimientos posibles de la celula de carga y del asiento. En el dispositivo descrito en el documento D01 no parece contemplarse dichos movimientos, tal y como se ha comentado en la primera reivindicación. Sin embargo, la posibilidad de mover tanto el asiento como la celula de carga en las direcciones previstas, se encuentra descrita en el documentoD02 (figuras 1 y 3, columna 6, linea15-columna28, linea 11; D02) . Por lo tanto, un experto en la materia, utilizaria dichas caracteristicas tecnicas tal y como se ha expuestoanteriormente, conocimiento tecnico para estas reivindicaciones 2 y 3 no presentan actividad inventiva segun el articulo 8.1 de la ley de patentes 11/1986.
La reivindicación 4 expone que las distancias involucradas en el ensayo quedan grabadas en el mismo. El documento D02 divulga que su sistema preve tal caracteristica tecnica (resumen; D02) . Por lo tanto, dicha reivindicación no presenta actividad inventiva segun el articulo 8.1 de la ley de patentes 11/1986.
La reivindicación 5 expone que un extremo de la viga esta articulada y en el otro apoya sobre la rodilla, tal y como se describe en el documento D01. Ademas, expone que el contacto entre la viga y la rodilla se realiza a traves de un dispositivo cilindrico. Se trata de una mera ejecución particular para un experto en la materia, ya que se trata de transmitir la fuerza verticalmente repartida a lo largo del eje z sobre un area concreta. A modo de ejemplo se cita el documento D03 (Blackburn 16 2006) . Por lo tanto, dicha reivindicación no presenta actividad inventiva segun el articulo 8.1 de la ley de patentes 11/1986.
Reivindicación 6 (metodo) :
Se considera como estado de la tecnica mas cercano el documento D01. En dicho documento se aborda el calculo expuesto en las etapas 2 y 3 partiendo de la misma ecuación. Por lo tanto, dicha reivindicación no presenta actividad inventiva segun el articulo 8.1 de la ley de patentes 11/1986.
Reivindicaciones 7-11:
Las reivindicaciones dependientes hacen referencia a distintos metodos de ajuste matematico conocidos en el campo de los metodos numericos y que un experto en la materia utilizaria segun las circunstancias. Por lo tanto, dichas reivindicaciones carecen de actividad inventiva segun el articulo 8.1 de la ley de patentes 11/1986.
Informe del Estado de la Tecnica Pagina 4/4
Patentes similares o relacionadas:
PROCEDIMIENTO Y DISPOSITIVO DE REGISTRO AUTOMÁTICO DE LA LOCOMOCIÓN DE NEMATODOS U ORGANISMOS PEQUEÑOS DE TAMAÑOS SIMILARES POR INTERFEROMETRÍA TEMPORAL DE MICROHACES DE LUZ, del 23 de Julio de 2020, de PHYLUMTECH S.A: Procedimiento y dispositivo de registro automático de la locomoción de nematodos u organismos pequeños de tamaños similares por interferometría temporal de microhaces […]
DISPOSITIVO PARA EVITAR EPISODIOS DE APNEA EN INFANTES, del 11 de Junio de 2020, de PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE: Dispositivo para evitar episodios de apnea en infantes, que simula un patrón de respiración adecuado para sincronizar la respiración del infante y que […]
Estímulo terapéutico mejorado para un sistema de entrañado de succión no nutritiva, del 10 de Junio de 2020, de Innara Health, Inc: Un sistema de procesamiento codificado con una aplicación para estimular un CPG y un nervio trigémino en un cerebro humano, influyendo […]
Control electrofisiológico de contracciones uterinas, del 10 de Junio de 2020, de Nemo Healthcare B.V: Un dispositivo de procesamiento de señales para procesar señales electrofisiológicas relacionadas con contracciones uterinas de una mujer […]
Aparato y método para la evaluación automática del transcurso de una sesión de entrenamiento, del 3 de Junio de 2020, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para la valoración automática de un transcurso de un ejercicio de entrenamiento, que comprende: proporcionar una pluralidad de informaciones […]
 Procedimiento y aparato para determinar información indicativa de disfunciones cardíacas, del 29 de Abril de 2020, de Precordior Oy: Un aparato que comprende:
- una interfaz de señal para recibir una primera señal indicativa de movimiento cardiovascular y medida con un elemento […]
Procedimiento y aparato para determinar información indicativa de disfunciones cardíacas, del 29 de Abril de 2020, de Precordior Oy: Un aparato que comprende:
- una interfaz de señal para recibir una primera señal indicativa de movimiento cardiovascular y medida con un elemento […]
Sistema y método para determinar el sueño y las fases de sueño de una persona, del 22 de Abril de 2020, de V-Watch SA: Un sistema para determinar la transición de fase de sueño de una persona, el sistema que comprende: medios de detección de la frecuencia cardíaca […]
Sistema para restaurar la función muscular de la columna lumbar, del 25 de Marzo de 2020, de Mainstay Medical Limited: Un sistema para recuperar la función muscular de la columna lumbar, el sistema que comprende: uno o más electrodos configurados […]