COJINETE MAGNETICO DE REPULSION.
Cojinete magnético de repulsión.
El objeto de la invención consiste en implementar un soporte radial y axial de ejes de máquinas rotativas por medio de cojinetes de suspensión por levitación magnética sustituyendo totalmente a los cojinetes de bolas,
rodillos y cojinetes de fricción hidrodinámicos convencionales. La innovación consiste en ejercer fuerzas magnéticas de repulsión entre las partes fijas (estator o carcasa) y móviles (rotor o eje) de las máquinas rotativas por medio de electroimanes convenientemente alimentados con corriente continua para lograr la repulsión entre las partes fijas y móviles (carcasa o estator y rotor o eje) y evitar así el contacto físico entre rotor y estator y consecuentemente la fricción mecánica entre el eje y el soporte del mismo
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200702372.
Solicitante: UNIVERSIDADE DA CORUA.
Nacionalidad solicitante: España.
Provincia: A CORUÑA.
Inventor/es: FERREIRO GARCIA,RAMON.
Fecha de Solicitud: 5 de Septiembre de 2007.
Fecha de Publicación: .
Fecha de Concesión: 7 de Septiembre de 2010.
Clasificación Internacional de Patentes:
- F16C32/04 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16C ARBOLES; ARBOLES FLEXIBLES; MEDIOS MECANICOS PARA TRANSMITIR MOVIMIENTO EN UNA FUNDA FLEXIBLE; ELEMENTOS DE LOS MECANISMOS DEL CIGÜEÑAL; PIVOTES; UNIONES PIVOTANTES; PIEZAS ROTATIVAS DE INGENIERIA DISTINTAS A LAS PIEZAS DE TRANSMISION MECANICA, ACOPLAMIENTOS, EMBRAGUES O FRENOS; COJINETES. › F16C 32/00 Cojinetes no previstos en otro lugar. › usando medios de soporte magnéticos eléctricos.
- H02K7/09 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02K MAQUINAS DINAMOELECTRICAS (relés dinamoeléctricos H01H 53/00; transformación de una potencia de entrada en DC o AC en una potencia de salida de choque H02M 9/00). › H02K 7/00 Dispositivos para manipular energía mecánica estructuralmente asociados con con máquinas dinamo-eléctricas, p. ej. asociación estructural con un motores mecánico de arrastre o máquinas dinamoeléctrica auxiliares. › con cojinetes magnéticos.
Clasificación PCT:
Fragmento de la descripción:
Cojinete magnético de repulsión.
Objeto de la invención
El objeto de la invención consiste en implementar un cojinete de soporte radial y axial para ejes de máquinas rotativas que opera bajo el principio de levitación magnética, sustituyendo totalmente a los cojinetes de bolas, rodillos y cojinetes de fricción hidrodinámicos convencionales. La innovación consiste en lograr una fuerza de repulsión entre las partes fijas (estator o carcasa) y móviles (rotor o eje) de las máquinas rotativas por medio de electroimanes convenientemente alimentados con corriente continua para lograr la repulsión entre las partes fijas y móviles del cojinete (estator y rotor) evitando así el contacto físico entre rotor y estator y consecuentemente la fricción mecánica entre el rotor y el estator.
Antecedentes de la invención
Como resultado de un minucioso rastreo sobre el estado de la tecnología relacionada con los diferentes tipos de cojinetes magnéticos utilizados actualmente en las máquinas rotativas, se conocen esencialmente dos tipos de cojinetes de levitación magnética:
(a)
- imanes permanentes.
- electroimanes ubicados en el soporte o estator e imanes permanentes en el eje. Ambos modelos se caracterizan por su estabilidad inherente sin necesidad por tanto de un sistema de control de posición del eje.
(b)
- electroimanes ubicados en el soporte o estator y un medio de atracción ferromagnético constituido por el rotor o eje. Se caracteriza por su inestabilidad inherente. Por tanto, este sistema de cojinete necesita un sistema de control eficiente para mantener el eje de rotación del rotor en torno al centro geométrico axial. Por sus características eléctricas pueden ejercer fuerzas de atracción sobre el eje, superiores a las que se obtienen con los cojinetes magnéticos de imanes permanentes. Esta es la razón por la que, pese a su inestabilidad inherente, es el más utilizado en la industria.
Entre los fabricantes de ambos tipos de cojinetes magnéticos destacan SKF y Foster-Miller.
Con objeto lograr un modelo de cojinete inherentemente estable, es decir que opere por repulsión entre las partes fijas y móviles, y además reducir el tamaño de los cojinetes magnéticos y el peso del eje, así como incrementar la capacidad para rechazar perturbaciones ejercidas por fuerzas externas tales como vibraciones provocadas por desequilibrio dinámico o el peso del rotor con los elementos asociados, se propone una innovación basada en la utilización de electroimanes ubicados en el rotor o parte móvil de la máquina rotativa.
Descripción de las figuras
Para iniciar la descripción que se está realizando y con objeto de ayudar a una mejor comprensión de las características del invento, se acompaña a la presente memoria descriptiva, como parte integral de la misma, un juego de figuras en el que, con carácter ilustrativo y no limitativo, se representa lo siguiente:
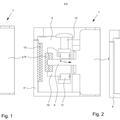
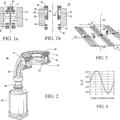
Figura 1. Cojinete electrodinámico de repulsión radial. (a) eje de material no magnético. (b) eje ferromagnético.
Figura 2 (a). Cojinete electrodinámico de repulsión axial.
Figura 2(b). Cojinete electrodinámico de repulsión radial axial.
Figura 2(c). Cojinete electrodinámico de repulsión radial axial.
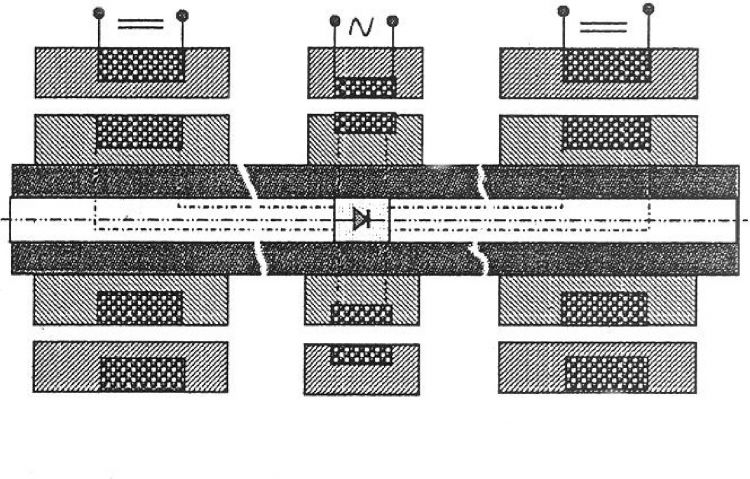
Figura 3. Esquema de la fuente de alimentación de continua para alimentación de los electroimanes del rotor mostrando transformador rectificador y filtro.
Figura. 4. Transformador para alimentación de los electroimanes ubicados en el rotor. (a) Eje de material ferromagnético. (b). Eje de material no magnético.
Figura 5. Transformador para alimentación de los electroimanes ubicados en el rotor basada en un acoplamiento magnético axial mostrando el rectificador y filtro.
Reivindicaciones:
1. Cojinete magnético de repulsión, caracterizado por ser de repulsión radial y estar constituido por dos electroimanes de forma tubular y concéntrica uno respecto al otro. Uno va fijado y ubicado en el estator, y el complementario va concéntrico a éste y adosado al rotor. El rotor a su vez va concéntrico a este electroimán. Ambos son alimentados con corrientes continuas de sentidos coincidentes para generar repulsión entre el estator y rotor.
2. Cojinete magnético de repulsión, según reivindicación 1ª, caracterizado por ser de repulsión axial y estar constituido por dos electroimanes de forma tubular alineados axialmente. Uno va fijado y ubicado en el estator frente a un extremo del rotor, y el otro electroimán de forma tubular va adosado al extremo del rotor frente al electroimán del estator, ambos alimentados con corrientes continuas de sentidos contrarios para generar repulsión axial entre el estator y rotor.
3. Cojinete magnético de repulsión, según reivindicación 1ª y 2ª caracterizado por ser de repulsión radial y axial y estar constituido por dos electroimanes de forma tubular alineados axialmente, en donde las formas de los extremos de los electroimanes de la carcasa están modelados para ejercer fuerzas radiales y axiales simultáneamente.
4. Cojinete magnético de repulsión, según reivindicación 1ª y 2ª y 3ª, caracterizado por el sistema de alimentación de los electroimanes del rotor, el cual está constituido por un transformador cuyo primario o bobinado inductor está alojado en el estator y el secundario o bobinado inducido está alojado en el rotor. La corriente alterna obtenida por inducción electromagnética es rectificada y filtrada con dispositivos convencionales ubicados en el hueco concéntrico del rotor. Los electroimanes del estator son alimentados con corriente continua desde otra fuente externa.
5. Cojinete magnético de repulsión, según reivindicación 1ª y 2ª, caracterizado por dos sistemas de control de corriente a los electroimanes del estator y del rotor:
(1) sistema constituido por dos sensores decalados 90 grados de arco, un selector de la señal del mayor valor, un controlador y un amplificador de señal para alimentar la bobina del estator con una corriente variable, en donde la bobina del electroimán del rotor permanece con alimentación constante.
(2) sistema constituido por dos sensores decalados 90 grados de arco, un selector de la señal del mayor valor, un controlador y un amplificador de señal para alimentar con corriente continua la bobina del estator y un amplificador de alterna para alimentar el primario del transformador de la fuente de alimentación del electroimán del rotor, de tal manera que los electroimanes del estator y del rotor son alimentados con corriente variable en función de la posición radial del rotor respecto del estator.
6. Cojinete magnético de repulsión, según reivindicación 1ª, caracterizado por utilizar en el estator un juego de pares de electroimanes, alimentados mediante corriente continua de modo independiente entre si y de sentidos coincidentes con el sentido del electroimán del rotor para favorecer la coincidencia de igualdad polar y conseguir la repulsión magnética.
7. Cojinete magnético de repulsión, según reivindicación 1ª, caracterizado por el sistema de control individual de los electroimanes del estator, en donde, en función de la posición radial del rotor, se actúa de modo independiente sobre cada par de electroimanes del estator por medio de un controlador de realimentación, por cada par de bobinas diametralmente opuestas, tratando de llevar el rotor a su posición de referencia anulando el efecto de fuerzas externas y vibraciones del rotor.
Patentes similares o relacionadas:
Dispositivo de cojinete magnético y compresor, del 24 de Junio de 2020, de DAIKIN INDUSTRIES, LTD.: Un dispositivo de cojinete magnético, que comprende: un cojinete magnético que tiene un primer y un segundo electroimanes opuestos entre sí con un objeto […]
Generador de energía eléctrica y método de generación de energía eléctrica, del 6 de Mayo de 2020, de Vortex Bladeless, S.L: Un generador de energía eléctrica, que comprende: una primera parte que tiene un primer extremo y un segundo extremo, estando configurado el primer extremo […]
 Bomba y método para aminorar o eliminar ruidos perturbadores y/o vibraciones en las bombas, del 29 de Abril de 2020, de Schwarzer Precision GmbH & Co. KG: Bomba, en especial microbomba, con un grupo constructivo para bombas, donde el grupo constructivo para bombas presenta un electromotor […]
Bomba y método para aminorar o eliminar ruidos perturbadores y/o vibraciones en las bombas, del 29 de Abril de 2020, de Schwarzer Precision GmbH & Co. KG: Bomba, en especial microbomba, con un grupo constructivo para bombas, donde el grupo constructivo para bombas presenta un electromotor […]
Núcleo laminado para un cojinete magnético radial-axial combinado y método de fabricación correspondiente, del 12 de Febrero de 2020, de ATLAS COPCO AIRPOWER, NAAMLOZE VENNOOTSCHAP: Núcleo laminado de un estator o un rotor de un cojinete magnético radial-axial combinado con polarización de imán permanente o polarizado con corriente, comprendiendo […]
Instrumento de limpieza y cuidado personal, del 8 de Enero de 2020, de Shanghai Shift Electrics Co. Ltd: Un aparato de limpieza y cuidado personal, que comprende: un mango que comprende un alojamiento de mango , una parte de fuente de alimentación […]
 Construcción de volante de inercia de núcleo abierto, del 25 de Septiembre de 2019, de THE BOEING COMPANY: Un conjunto de volante de inercia para almacenar y liberar energia, que comprende:
un conjunto de rotor hueco sustancialmente cilindrico que comprende un rotor […]
Construcción de volante de inercia de núcleo abierto, del 25 de Septiembre de 2019, de THE BOEING COMPANY: Un conjunto de volante de inercia para almacenar y liberar energia, que comprende:
un conjunto de rotor hueco sustancialmente cilindrico que comprende un rotor […]
Reducción de fuerzas de rodamiento en una máquina eléctrica, del 20 de Febrero de 2019, de Rodger, David: Un accionamiento magnético, que comprende: una fuerza motriz primaria, que tiene una primera superficie; un rotor , que tiene una superficie […]
Soporte de rotor para una máquina eléctrica, del 6 de Febrero de 2019, de IMO HOLDING GMBH: Generador de inducido de disco para generar energía eléctrica a partir de la energía de rotación de una instalación de fuerza accionada en rotación, preferentemente […]