Ayuda visual con adquisición de imágenes tridimensionales.
Sistema de ayuda visual que incluye al menos una primera cámara (7) para adquirir una imagen connumerosos datos de imagen y medios electrónicos (11,
12) para procesar los datos de imagenadquiridos, estando diseñados los medios electrónicos (11, 12) para visualizar, en la reproducción dela imagen procesada, información adicional referente a la posición espacial y/o a determinadosatributos de los objetos de la imagen asociada a los objetos en la imagen adquirida y estandoasociados en la reproducción de la imagen procesada los objetos con información referente a ladistancia entre la cámara (7) y los objetos en la imagen adquirida, caracterizado porque el sistemade ayuda visual incluye además un dispositivo de estimulación (6) implantable en el órgano visual (5)del cuerpo para reproducir la imagen adquirida mediante una estimulación correspondiente delórgano visual (5), estando diseñados los medios electrónicos (11, 12) para posibilitar unarepresentación con profundidad selectiva de la imagen adquirida.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/011133.
Solicitante: Pixium Vision SA.
Nacionalidad solicitante: Francia.
Dirección: Institut de la Vision, 13, rue Moreau 75012 Paris FRANCIA.
Inventor/es: ZIEMECK,PATRICK, DAPPER,MARCUS, KOPKA,CHRISTIAN, HORNIG,RALF.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61F9/00 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61F FILTROS IMPLANTABLES EN LOS VASOS SANGUINEOS; PROTESIS; DISPOSITIVOS QUE MANTIENEN LA LUZ O QUE EVITAN EL COLAPSO DE ESTRUCTURAS TUBULARES, p. ej. STENTS; DISPOSITIVOS DE ORTOPEDIA, CURA O PARA LA CONTRACEPCION; FOMENTACION; TRATAMIENTO O PROTECCION DE OJOS Y OIDOS; VENDAJES, APOSITOS O COMPRESAS ABSORBENTES; BOTIQUINES DE PRIMEROS AUXILIOS (prótesis dentales A61C). › Métodos o dispositivos para el tratamiento de los ojos; Dispositivos para colocar las lentes de contacto; Dispositivos para corregir el estrabismo; Aparatos para guiar a los ciegos; Dispositivos protectores de los ojos que se llevan sobre el cuerpo o en la mano (gorras con medios para la protección de los ojos A42B 1/0181; viseras para cascos A42B 3/22; baños para los ojos A61H 35/02; gafas de sol o de protección con las mismas características que las gafas normales G02C).
PDF original: ES-2416290_T3.pdf
Fragmento de la descripción:
Ayuda visual con adquisición de imágenes tridimensionales La presente invención se refiere a una ayuda visual con adquisición de información e imágenes tridimensionales. Una ayuda visual en el sentido de la presente invención incluye también otros sistemas de adquisición de imágenes, por ejemplo intensificadores de luz residual o dispositivos de visión nocturna para apoyar la visión humana. Estas ayudas visuales o prótesis visuales, por ejemplo implantes de retina, pueden incluir también funciones para el aumento de imágenes o para la intensificación de luz residual.
Ya se han desarrollado ayudas visuales en forma de implantes para la retina del ojo humano, previstas para el tratamiento de pacientes que han perdido parcial o totalmente la capacidad visual por defectos de la retina. En la zona de la retina se implanta un dispositivo microelectrónico con numerosos elementos de píxel fotosensibles a través de los cuales se adquiere una imagen proyectada sobre la retina a través del recorrido óptico natural del ojo todavía intacto. En otras prótesis visuales, la adquisición de imágenes se produce mediante una cámara externa, en particular una cámara de vídeo, preferentemente alojada en unas gafas. La imagen adquirida por los elementos de píxel o por la cámara se transforma en señales eléctricas, que se transmiten a través de electrodos de estimulación mediante impulsos eléctricos de estimulación a las células ganglionares de la retina y al nervio óptico para restablecer o mejorar la capacidad visual del paciente. Sin embargo, las ayudas visuales tienen la desventaja de que únicamente procesan la imagen adquirida a través del recorrido óptico natural del ojo o por la cámara externa. Por ello, la imagen así formada es sólo bidimensional y no incluye información tridimensional alguna.
Por consiguiente, para restablecer o apoyar la capacidad visual natural del modo más real posible mediante una ayuda visual o prótesis visual, es deseable incluir en el procesamiento de imágenes información adicional además del registro puro de una imagen bidimensional.
El documento de patente DE 10103922 constituye el preámbulo de la reivindicación 1. En él se describe un dispositivo de visualización y control de datos con un dispositivo óptico que puede ser portado a modo de gafas por un operador. Está previsto un dispositivo de procesamiento de señales que permite evaluar las señales registradas por el dispositivo óptico y transmitir una señal de salida correspondiente a una interfaz de comunicación. En base a esta señal de salida e instrucciones de mando adicionales se puede conseguir que el dispositivo incluya información de imagen adicional en la retina.
Este objetivo se resuelve mediante el dispositivo según la invención con las características indicadas en la reivindicación 1. En las reivindicaciones dependientes se definen perfeccionamientos ventajosos de la presente invención.
La presente invención resuelve el objetivo arriba mencionado mediante un sistema de ayuda visual que incluye al menos una cámara para adquirir una imagen con numerosos datos de imagen, medios electrónicos para procesar los datos de imagen adquiridos y un dispositivo de estimulación implantable en el órgano visual del cuerpo para reproducir la imagen procesada mediante una estimulación correspondiente del órgano visual, visualizándose en la reproducción de la imagen procesada información adicional y/o determinados atributos referentes a la posición espacial de objetos en la imagen adquirida, estando asociados dichos atributos con los objetos en dicha imagen.
Con una ayuda visual de acuerdo con la presente invención se pueden visualizar especialmente o destacar en particular aquellos objetos que se encuentran en el entorno inmediato del usuario, mientras que, opcionalmente, los objetos más alejados se pueden enmascarar. Para destacar determinados objetos se pueden utilizar también diferentes tonos de gris o diferentes colores. Por ejemplo, los objetos que se encuentran en el entorno cercano se pueden representar en un color o un tono de gris diferente al de los objetos más alejados. Así, la presente invención ofrece la ventaja de poder adquirir una imagen tridimensional del entorno actual del usuario en la medida en que la imagen visualizada por el usuario del sistema de ayuda visual según la invención comprende información adicional, por ejemplo referente a la distancia relativa de los objetos incluidos en la imagen, lo que permite obtener una representación con profundidad selectiva de la imagen adquirida.
La ventaja de la representación con profundidad selectiva es que el usuario del sistema de ayuda visual, a pesar de una resolución de píxeles, gradación de colores o gradación de grises limitada o una cantidad limitada de puntos de imagen (píxel) del sistema de ayuda visual, puede obtener una imagen visualmente bien estructurada y fácil de interpretar del entorno cercano o del más alejado. El entorno del usuario se puede visualizar por ejemplo mediante una representación de contornos, lo que se puede conseguir con una cantidad relativamente pequeña de puntos de imagen activados simultáneamente.
De acuerdo con la presente invención, el sistema total de ayuda visual incluye unas gafas y opcionalmente una unidad transportada junto al cuerpo, por ejemplo un ordenador de bolsillo, que puede ser transportada en
cualquier parte del cuerpo y que se puede comunicar e intercambiar datos de imagen con las gafas mediante una conexión por cable o alternativamente inalámbrica por radio. En caso de una aplicación especial de la presente invención en un sistema de implante de retina arriba descrito, también puede estar previsto adicionalmente un dispositivo implantado en el cuerpo que recibe los datos de imagen adquiridos por la cámara externa.
En una forma de realización preferente de la presente invención, se utiliza un mapa tridimensional para editar la sección de imagen representada. Se puede emplear un mapa tridimensional del entorno de una sección de imagen determinada de modo que sólo se representen los segmentos de imagen situados cerca o a media distancia del usuario de la ayuda visual, ya que éstos pueden tener más interés para el usuario que aquellos segmentos u objetos que se encuentran más alejados. Alternativamente, en un modo de funcionamiento especial de la ayuda visual según la invención, se pueden representar únicamente los objetos más alejados si el usuario de la ayuda visual desea visualizar preferentemente el fondo de la imagen adquirida o los objetos más alejados.
Los diferentes modos de funcionamiento de la ayuda visual pueden incorporarse de forma fija en el procesamiento de imágenes del sistema o se pueden poner a disposición del usuario para que éste los elija opcionalmente. La selección de los modos de funcionamiento se puede llevar a cabo a través de elementos de mando de las gafas, a través del ordenador de bolsillo opcionalmente presente o con un mando a distancia que puede ser transportado en cualquier parte del cuerpo.
El área de representación del sistema se puede ajustar a un modelo tridimensional del ordenador de bolsillo mediante superficies de sección matemáticas seleccionadas o funciones superficiales. Como superficies de sección se pueden elegir, por ejemplo, secciones de una superficie plana o de una superficie cilíndrica o esférica o superficies de sección de cualquier otra forma. Así, de acuerdo con el modo de servicio del sistema de implante, en el modelo tridimensional del ordenador de bolsillo (o de las gafas) se representan únicamente las superficies de sección con los objetos adquiridos.
Mediante un dispositivo de ajuste del sistema de implante, el usuario de la ayuda visual puede elegir un modo de funcionamiento, por ejemplo un modo de exploración, donde sólo se representan aquellos objetos que se encuentran en un área determinada de registro del sistema. Además, el usuario de la ayuda visual puede variar el área de registro óptico del sistema mediante el dispositivo de ajuste. En un modo de funcionamiento especial del sistema según la invención, el área de registro óptico del sistema se puede ampliar y reducir de nuevo de forma reiterada, de modo que el usuario de la ayuda visual recibe continuamente la presentación de vistas en corte espaciales del entorno.
De acuerdo con otra forma de realización preferente, la ayuda visual según la invención puede elaborar un mapa tridimensional a partir de los datos de imagen adquiridos y mostrárselo al usuario mediante la capacidad de cálculo electrónica del ordenador de bolsillo. Con un mapa tridimensional también se puede presentar al usuario de la ayuda visual una sección de imagen, por ejemplo en una perspectiva a... [Seguir leyendo]
Reivindicaciones:
1. Sistema de ayuda visual que incluye al menos una primera cámara (7) para adquirir una imagen con numerosos datos de imagen y medios electrónicos (11, 12) para procesar los datos de imagen adquiridos, estando diseñados los medios electrónicos (11, 12) para visualizar, en la reproducción de la imagen procesada, información adicional referente a la posición espacial y/o a determinados atributos de los objetos de la imagen asociada a los objetos en la imagen adquirida y estando asociados en la reproducción de la imagen procesada los objetos con información referente a la distancia entre la cámara (7) y los objetos en la imagen adquirida, caracterizado porque el sistema de ayuda visual incluye además un dispositivo de estimulación (6) implantable en el órgano visual (5) del cuerpo para reproducir la imagen adquirida mediante una estimulación correspondiente del órgano visual (5) , estando diseñados los medios electrónicos (11, 12) para posibilitar una representación con profundidad selectiva de la imagen adquirida.
2. Sistema de ayuda visual según la reivindicación 1, caracterizado porque la información adicional referente a la posición de objetos en la imagen adquirida se indica en la reproducción de la imagen procesada destacando visualmente determinados objetos, preferentemente utilizando diferentes tonos de gris y/o determinados colores para visualizar determinados objetos.
3. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque algunos objetos de la imagen adquirida se identifican en la reproducción de la imagen procesada mediante la visualización de información referente a la distancia de los objetos en cuestión con respecto a la posición del usuario del sistema de la ayuda visual (1) mediante una visualización especial.
4. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque los objetos de la imagen adquirida más cercanos a la posición del usuario del sistema de ayuda visual (1) se identifican en la reproducción de la imagen procesada mediante la visualización con tonos de gris diferentes y/o colores diferentes a los empleados para los objetos más alejados.
5. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque los objetos de la imagen adquirida más alejados de la posición del usuario de la ayuda visual (1) se enmascaran en la reproducción de la imagen procesada.
6. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque a cada punto de imagen de la imagen a procesar se le asigna un vector de punto de imagen [Pi = (xi, yi, zi, Ei) ] que incluye coordenadas espaciales tridimensionales [xi, yi, zi] y una variable de propiedades Ei que representa determinados atributos del punto de imagen en cuestión.
7. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque una reproducción tridimensional de la imagen registrada incluye puntos de retícula [Pi = (xi, yi, zi) ] correspondientes a determinados puntos de imagen de la imagen adquirida y, mediante líneas entre puntos de retícula vecinos, se despliega una retícula.
8. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque, en un modo de funcionamiento determinado, en la reproducción de la imagen procesada sólo se visualizan los objetos de la imagen adquirida que se encuentran en una zona de registro determinada de la ayuda visual (1) .
9. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque es posible ajustar diferentes modos de funcionamiento en el sistema de ayuda visual (1) , en función de los cuales el sistema de ayuda visual (1) procesa la imagen adquirida y reproduce la imagen procesada, y porque la selección de los modos de funcionamiento se realiza mediante elementos de mando del sistema de ayuda visual (1) o con un mando a distancia.
10. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque, en un modo de funcionamiento determinado, el área de registro óptico del sistema de ayuda visual
(1) se amplía y después se reduce de nuevo de forma reiterada, con lo que se visualizan continuamente vistas en corte espaciales con áreas de registro diferentes.
11. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque, a través de los medios electrónicos (11, 12) , mediante los datos de imagen registrados se genera y visualiza una representación en perspectiva a vista de pájaro u otras perspectivas o etapas de zum de la imagen adquirida y los objetos que ésta incluye.
12. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque, a través de los medios electrónicos (11, 12) , mediante los datos de imagen registrados se genera y visualiza una proyección horizontal de la imagen adquirida y los objetos que ésta incluye.
13. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque, a través de los medios electrónicos (11, 12) , mediante los datos de imagen registrados se genera y visualiza una reproducción tridimensional de la imagen adquirida y los objetos que ésta incluye.
14. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque incluye además una memoria de datos donde se puede almacenar una biblioteca de imágenes con una cantidad de patrones de imagen, y porque los medios electrónicos (11, 12) están configurados para llevar a cabo un reconocimiento de patrones de imagen de modo que los objetos de la imagen adquirida se comparan con patrones de imagen prefijados y se asignan correspondientemente.
15. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque para crear una reproducción tridimensional se registran al menos dos imágenes desde diferentes posiciones espaciales de la cámara (7) teniendo en cuenta las posiciones espaciales diferentes y la orientación angular relativa de la cámara (7) , siendo dichas imágenes procesadas por los medios electrónicos (11, 12) .
16. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque la cámara (7) está acoplada con al menos un sensor de aceleración (9) que determina la aceleración
de traslación de la cámara (7) en las tres direcciones espaciales [x, y, z] y que, dependiendo de la cantidad y la disposición de los sensores de aceleración (9) , también puede
determinar las aceleraciones angulares de la cámara (7) en los tres ejes espaciales [x, y, z].
17. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque la cámara (7) está acoplada con al menos un sensor de aceleración angular (10) que determina la
aceleración angular de la cámara (7) en los tres ejes espaciales [x, y, z].
18. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque, a través de los medios electrónicos (11, 12) , mediante los valores de medida de la aceleración angular proporcionados por una serie de sensores de aceleración angular (10) , se determina una variación de la orientación espacial de la cámara (7) con respecto a una orientación espacial previa de la cámara (7) ; y/o incluyendo el sistema de ayuda visual (1) integradores electrónicos (11, 12) para la integración de los valores de medida de la aceleración proporcionados por una serie de sensores de aceleración (9, 10) y para el cálculo de la posición espacial y la orientación de la cámara (7) .
19. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque se registra una secuencia de al menos dos imágenes en cada caso en una posición diferente de la cámara (7) , preferentemente a intervalos de tiempo fijos.
20. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque, a través de los medios electrónicos (11, 12) , a partir de la secuencia de las imágenes adquiridas desde diferentes posiciones de la cámara, se genera y visualiza una reproducción tridimensional o estereoscópica de las imágenes registradas y los objetos que éstas incluyen; y/o porque, a través de los medios electrónicos (11, 12) , a partir de la secuencia de imágenes adquiridas desde diferentes posiciones de la cámara, se calcula la posición espacial y/o la orientación de la cámara (7) .
21. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque la al menos una cámara (7) está integrada en unas gafas (2) que pueden ser llevadas por el usuario como unas gafas normales.
22. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque está prevista una segunda cámara (7) que registra imágenes estereoscópicas junto con la primera cámara (7) , estando integrada la segunda cámara (7) preferentemente en las gafas (2) en una posición alejada de la primera cámara (7) .
23. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque se determina la velocidad actual de la cámara (7) a través de la variación de los datos de imagen registrados, teniendo en cuenta los valores de medición de aceleración calculados por los sensores de aceleración (9, 10) acoplados con la cámara (7) .
24. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque la orientación angular de la cámara (7) se determina evaluando los valores de posición angular previos mediante una brújula, una sonda de Hall y/o un sensor de inclinación gravitatorio.
25. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque está previsto al menos un sensor de distancia para determinar la distancia de objetos y/u obstáculos en la imagen registrada, estando configurado el sensor de distancia preferentemente como sensor ultrasónico o escáner láser rotatorio en la zona espectral visible o no visible.
26. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque incluye una fuente luminosa para iluminar la sección de imagen a adquirir por la cámara (7) con luz
(18) en la zona espectral visible o no visible, con luz infrarroja o con luz láser infrarroja o visible (18) , y porque la cámara (7) del sistema de ayuda visual (1) es sensible en la zona espectral correspondiente.
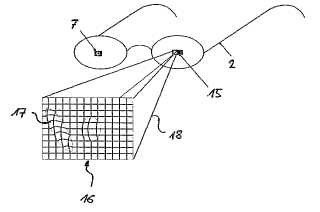
27. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque sobre la sección de imagen a adquirir por la cámara (7) proyecta luz (18) con un patrón de bandas
(16) homogéneo o estructurado, y porque, a través de los medios electrónicos (11, 12) , a partir de las distorsiones, curvaturas, desplazamientos u otros cambios (17) del patrón de bandas (16) presentes en la imagen adquirida, se elabora y visualiza una reproducción tridimensional de la imagen registrada y los objetos que ésta incluye.
28. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque, para iluminar de la sección de imagen a registrar por la cámara (7) con un patrón de bandas (16) , incluye un proyector láser con unidad de deflexión, un proyector de retícula (15) o una máscara de proyección posicionada en el recorrido óptico de una fuente luminosa.
29. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque genera efectos de interferencia con luz láser (18) y proyecta un patrón de interferencia (16) sobre la sección de imagen a adquirir por la cámara (7) .
30. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque adquiere alternativamente una imagen de la sección de imagen a registrar bajo iluminación con un patrón de bandas (16) y una imagen de la sección de imagen a registrar sin iluminación, y combina o compara entre sí con los medios electrónicos (11, 12) los datos de imagen de las imágenes registradas.
31. Sistema de ayuda visual según cualquiera de las reivindicaciones anteriores, caracterizado porque la sección de imagen a adquirir se explora mediante un rayo láser para obtener datos de imagen y/o información sobre la distancia de objetos en la imagen registrada.
Vector de Vector de Vector de posición aceleración velocidad relativa Aceleraciones medidas
Integrador 1 Integrador 2
Desplazamiento de velocidad
Posición de cámara 5,
imagen 5 Posición de cámara 4,
Posición de imagen 4 Posición de cámara 1, cámara 2, imagen 1 imagen 2 Posición de cámara 3, imagen 3
Patentes similares o relacionadas:
Dispositivo dispensador de doble cámara, del 1 de Julio de 2020, de Cambium Medical Technologies LLC: Un dispositivo dispensador de un solo uso que comprende: una cámara seca que comprende material liofilizado; una cámara húmeda […]
DISPOSITIVO PARA LA SEPARACIÓN DEL PÁRPADO DE UN PACIENTE, del 22 de Junio de 2020, de ADMINISTRACIÓN GENERAL DE LA COMUNIDAD AUTÓNOMA DE EUSKADI: Dispositivo para la separación del parpado de un paciente en procedimientos de inyección intravítrea de sustancias medicamentosas, que comprende un sector distal […]
Método para fabricar un dispositivo dispensador para gotas para los ojos, del 10 de Junio de 2020, de DOMPE' FARMACEUTICI S.P.A.: Proceso para la producción de un dispositivo dispensador de gotas para los ojos, que comprende al menos los siguientes pasos: - proporcionar un primer […]
Sistema para dirigir agentes hacia dentro de un ojo, del 3 de Junio de 2020, de UNIVERSITY OF MARYLAND: Un sistema para dirigir un agente hacia el interior o a traves de un tejido, que comprende: (a) un agente que es magnetico o magnetizable o que responde magneticamente; […]
Dispensación de líquidos con detección de parpadeo, del 27 de Mayo de 2020, de JOHNSON & JOHNSON VISION CARE, INC.: Un aparato para dispensar líquido en un ojo, el aparato comprendiendo: un emisor para emitir un haz de luz hacia un […]
2-perfluorohexil octano para administración oftálmica, del 6 de Mayo de 2020, de NOVALIQ GMBH: Una composición oftálmica que comprende el compuesto caracterizado por la fórmula general CF3(CF2)5(CH2)7CH3 y CF3(CF2)5-CH(CH3)-(CH2)5-CH3 en la que n es 5 y m es […]
APLICADOR DE SOLUCIONES OFTÁLMICAS EN ENVASES DE MONODOSIS Y UN KIT QUE CONTIENE EL MISMO, del 23 de Abril de 2020, de GAMBOA BURGOS, Alejandro: La presente invención se refiere a un aplicador de soluciones oftálmicas en envases de monodosis que comprende una estructura con espacios abiertos […]
Dispositivo para administrar un fármaco al tejido ocular usando microagujas, del 15 de Abril de 2020, de EMORY UNIVERSITY: Un dispositivo para administrar una formulación de fármaco fluido al ojo de un paciente, que comprende: una microaguja hueca que tiene un […]