Sistema para mejorar el comportamiento durante el viraje de un vehículo equipado con un sistema de control de estabilidad.
Un sistema (4) para controlar un vehículo (1) que comprende varias ruedas (2),
y un conjunto de frenado (3) paraejercer una fuerza de frenado en al menos una rueda (2) basándose en varios parámetros de control (Pi);
comprendiendo dicho sistema (4) un sistema de control de estabilidad (7) del vehiculo configurado para generardichos parámetros de control (Pi) como una función de una cantidad de control (ΔP) asociada con la intensidad de lafuerza de frenado a ejercer en la menos una dicha rueda (2); dicho sistema estando caracterizado porquecomprende un sistema de mejora del manejo (10) del vehículo que proporciona dicha cantidad de control (ΔP) adicho sistema de control de estabilidad (7) del vehículo y está configurado para:
- determinar la presencia / ausencia de aceleración de giro de dicho vehículo (1) basada en la velocidadlongitudinal (v1) del vehículo, el ángulo de giro (δ) de las ruedas delanteras del vehículo (1), y la velocidad operativa (ω) del pedal acelerador del vehículo; y
si se detecta la aceleración de giro del vehículo:
calcular un índice de derrape de referencia (ΨREF) del vehículo basándose en al menos la velocidad longitudinal (v1)del dicho vehículo (1) y el ángulo de giro (δ) del vehículo; estando determinado dicho índice de derrape de referencia(ΨREF) del vehículo por una serie de Taylor de la ecuación:
donde δ es el ángulo de giro; KUS es un coeficiente de subviraje; L es la distancia entre ejes del vehículo; ts es larelación de giro; y v1 es la velocidad longitudinal del vehículo.
y
ajustar, dicha cantidad de control (ΔP), hasta reducir a cero la diferencia entre el índice de derrape actual (Ψ) y dichoíndice de derrape de referencia (ΨREF);
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09425332.
Solicitante: FIAT GROUP AUTOMOBILES S.P.A.
Nacionalidad solicitante: Italia.
Dirección: CORSO GIOVANNI AGNELLI, 200 10135 TORINO (TO) ITALIA.
Inventor/es: CAMPO, SEBASTIANO, CORNO,MATTEO, SAVARESI,SERGIO, NATALI,NICOLA, FORTINA,ANDREA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60T8/1755 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60T SISTEMAS DE CONTROL DE FRENOS PARA VEHICULOS O PARTES DE ESOS SISTEMAS; SISTEMAS DE CONTROL DE FRENOS O PARTES DE ESOS SISTEMAS, EN GENERAL (control de sistemas de frenado electrodinámico B60L 7/00; control conjugado de frenos y otras unidades de accionamiento de vehículos B60W ); DISPOSICION DE ELEMENTOS DE FRENADO DE VEHICULOS EN GENERAL; DISPOSITIVOS PORTATILES PARA EVITAR EL MOVIMIENTO INDESEADO DE VEHICULOS; MODIFICACIONES REALIZADAS EN VEHICULOS PARA FACILITAR LA REFRIGERACION DE LOS FRENOS. › B60T 8/00 Disposiciones para adaptar la fuerza de frenado sobre la rueda a las condiciones propias del vehículo o al estado del suelo, p. ej. por limitación o variación de la fuerza de frenado (cambiando el número de cilindros de freno en acción en el sistema de frenado B60T 17/10). › Regulación de los frenos especialmente adaptada para el control de la estabilidad del vehículo, p.ej. teniendo en cuenta el ángulo de oscilación o la aceleración transversal al tomar una curva (sistemas de control de la estabilidad dinámica de los vehículos por otra forma que controlando una subunidad particular B60W 30/02).
PDF original: ES-2398875_T3.pdf
Fragmento de la descripción:
Sistema para mejorar el comportamiento durante el viraje de un vehículo equipado con un sistema de control de estabilidad.
La presente invención se refiere a un sistema para mejorar el comportamiento durante el viraje de un vehículo, en particular un automóvil, equipado con un sistema de control de estabilidad.
Tal y como es conocido, en los últimos años, la industria automovilística ha llegado a ser consciente, de forma creciente, de la necesidad de mejorar la seguridad de la conducción.
En este sentido, se han concebido sistemas electrónicos de control de estabilidad para vehículos tales como el sistema ESC (Control de Estabilidad Electrónico) , el cual interviene cuando hay un derrape, ajustando la potencia de salida del motor y/o controlando diferencialmente el frenado de las ruedas del vehículo para enderezar automáticamente el vehículo.
De forma más específica, el sistema ESC está diseñado para intervenir en el caso de un volantazo brusco y/o en condiciones de sobre - subviraje provocadas por un mal manejo del vehículo cuando se trata de evitar el derrape del vehículo.
La arquitectura de control del sistema ESC está basada sustancialmente en varios modelos matemáticos que representan el comportamiento dinámico del vehículo en diferentes condiciones de conducción por medio de parámetros del vehículo y ecuaciones del movimiento.
De forma más específica, el comportamiento dinámico durante el viraje del vehículo en condiciones de sobre subviraje está definido por un modelo matemático caracterizado sustancialmente por parámetros del vehículo correspondientes a la "estructura mecánica", por ejemplo, geometría y distribución de masa, del vehículo.
A pesar de ser efectiva, la arquitectura de control del sistema de control de estabilidad anterior no permite al conductor, en condiciones estables del vehículo, mejorar el comportamiento durante el viraje del vehículo como sería deseable, para conseguir una respuesta, por ejemplo, un modo de comportamiento de carreras, distinto de aquel proporcionado por el sistema de control de estabilidad.
En otras palabras, en condiciones estables del vehículo, el sistema de control de estabilidad anterior no permite al conductor mejorar el comportamiento del vehículo, por ejemplo, conseguir un frenado más rápido de las ruedas, como respuesta al control del conductor.
GB2308167 describe un sistema y un método de control de la fuerza de frenada para un vehículo, para aplicar, de forma adecuada, la fuerza de frenada a las ruedas, para hacer el viraje estable y suave cuando se gira.
DE10328685 describe un dispositivo para estabilizar un vehículo cuando se conduce a lo largo de curvas, que comprende actuadores del ángulo de rueda delantera y trasera para controlar los correspondientes ángulos de giro de la rueda delantera y trasera.
EP 1522475 se refiere a un aparato se detecta el comportamiento de un vehículo, el cual calcula un valor de variación en un momento de derrape a partir de la diferencia entre el momento de derrape durante un giro a velocidad constante y el momento de derrape durante un giro acelerado o desacelerado, y también se refiere a un aparato para controlar el comportamiento del vehículo.
DE3943860 describe un método de control del movimiento de un vehículo que emplea frenos para mantener la estabilidad dependiendo de la diferencia entre el derrape requerido y el medido.
Es un objeto de la presente invención proporcionar un sistema de control del vehículo diseñado para mejorar el comportamiento durante el viraje del vehículo, mientras se mantienen, al mismo tiempo, las funciones de seguridad del sistema de control de estabilidad, para reunir los requisitos anteriores.
De acuerdo con la presente invención, se proporciona un sistema de control del vehículo como el definido en la reivindicación 1 y de forma preferente, aunque no necesariamente, en cualquiera de las reivindicaciones, dependientes directa o indirectamente de la reivindicación 1.
Un modo de realización no limitativo de la presente invención será descrito por medio de un ejemplo con referencia a los dibujos que acompañan, en los cuales:
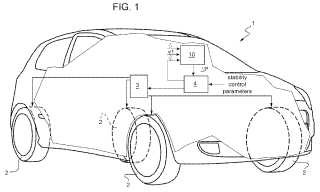
La figura 1 muestra un esquema de un automóvil equipado con un sistema de control de un vehículo, de acuerdo con las enseñanzas de la presente invención;
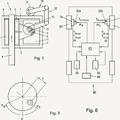
La figura 2 muestra un diagrama de bloques del sistema de control del vehículo de la figura 1;
La figura 3 muestra un esquema del mecanismo de estado del bloque observador que forma parte del sistema de control del vehículo de la figura 1;
La figura 4 muestra un gráfico de tiempo ejemplo del índice de derrape de referencia determinado por el sistema de control del vehículo de la figura 1.
El número 1 en la figura 1, representa, en su conjunto, un vehículo, en particular un automóvil, que comprende cuatro ruedas 2 de apoyo; un conjunto de frenado 3, que a su vez comprende pinzas de freno (no mostradas) , cada una activable, de forma selectiva, para frenar una rueda 2 correspondiente del vehículo 1; y un sistema de control del vehículo 4 que controla el conjunto de frenado 3 para coordinar el frenado de las ruedas 2 por medio de las pinzas de frenado del conjunto de frenado 3.
El conjunto de frenado 3 es un dispositivo conocido y, al no ser objeto de la presente invención, no va a ser descrito en detalle.
El sistema de control del vehículo 4 comprende un sistema de control de estabilidad 7 configurado para intervenir, cuando hay un derrape, ajustando la salida de potencia del motor y/o regulando, de forma diferencial, un parámetro que controla la fuerza de frenado en las ruedas 2 del vehículo, para enderezar automáticamente el vehículo 1.
De forma más específica, en el ejemplo mostrado, el sistema de control de estabilidad 7, de forma preferente, aunque no necesariamente, comprende un sistema ESC (Control de Estabilidad Electrónico) , que a su vez comprende un bloque de regulación 8, para controlar la distribución de las fuerzas de frenado en las ruedas del vehículo; y un bloque de procesamiento 9 para procesar el comportamiento dinámico del vehículo.
De forma más específica, el bloque de regulación 8 recibe varios parámetros del vehículo conocidos, tales como la velocidad de rueda, el ángulo de giro de rueda, la posición del pedal acelerador, el índice de derrape, la aceleración lateral, la aceleración longitudinal, etc.; y un diferencial o gradiente de un parámetro de regulación de la fuerza de frenado, en particular un gradiente de presión LP, el cual, como se explica en detalle más abajo, está relacionado con la fuerza de frenado a aplicarse a las pinzas de freno del conjunto de frenado 3, cuando se controla el frenado de las ruedas 2.
De forma más específica, el bloque de regulación 8 esta configurado para procesar los parámetros de vehículo y el gradiente de presión LP, para determinar los parámetros de regulación de la fuerza de frenado, en particular la presión de frenado Pi, asociada con el frenado de la rueda trasera del vehículo 1 en el lado interior de la curva trazada por el vehículo 1. El procesado mediante el bloque de regulación 8 es conocido y no se describe en detalle, excepto para establecer que corresponde al procesamiento implementado por un sistema ESC.
El bloque de procesamiento 9 del comportamiento dinámico del vehículo recibe la presión de frenado Pi asociada con el frenado de la rueda trasera del vehículo 1, así como las otras presiones de frenado Pi, y proporciona el índice de derrape l medido del vehículo 1.
El sistema de control del vehículo 4 también comprende un sistema de mejora del manejo del vehículo 10 diseñado para cooperar con el sistema de control de estabilidad 7 para permitir al conductor "modificar" el comportamiento dinámico del vehículo 1 cuando vira.
El sistema de mejora del manejo del vehículo 10 esta configurado para calcular un índice de derrape de referencia lREF como una función del comportamiento dinámico del vehículo cuando acelera alrededor de una curva, y calcula el gradiente del parámetro de control relacionado con la fuerza de frenado, en particular el gradiente de presión LP que se tiene que suministrar al sistema de control de estabilidad 7, basándose en la diferencia entre el índice de derrape de referencia lREF y el índice de derrape actual l.
De forma más específica, el sistema de mejora del manejo del vehículo 10 esta configurado para regular el gradiente de presión LP para reducir a cero la diferencia entre el índice de derrape de referencia lREF y el índice de derrape actual l.
Con referencia la figura 2, el sistema de mejora del manejo del vehículo 10 comprende... [Seguir leyendo]
Reivindicaciones:
1. Un sistema (4) para controlar un vehículo (1) que comprende varias ruedas (2) , y un conjunto de frenado (3) para ejercer una fuerza de frenado en al menos una rueda (2) basándose en varios parámetros de control (Pi) ; comprendiendo dicho sistema (4) un sistema de control de estabilidad (7) del vehiculo configurado para generar dichos parámetros de control (Pi) como una función de una cantidad de control (LP) asociada con la intensidad de la fuerza de frenado a ejercer en la menos una dicha rueda (2) ; dicho sistema estando caracterizado porque comprende un sistema de mejora del manejo (10) del vehículo que proporciona dicha cantidad de control (LP) a dicho sistema de control de estabilidad (7) del vehículo y está configurado para:
- determinar la presencia / ausencia de aceleración de giro de dicho vehículo (1) basada en la velocidad longitudinal (v1) del vehículo, el ángulo de giro (5) de las ruedas delanteras del vehículo (1) , y la velocidad operativa (w) del pedal acelerador del vehículo; y
si se detecta la aceleración de giro del vehículo: calcular un índice de derrape de referencia (lREF) del vehículo basándose en al menos la velocidad longitudinal (v1) del dicho vehículo (1) y el ángulo de giro (5) del vehículo; estando determinado dicho índice de derrape de referencia (lREF) del vehículo por una serie de Taylor de la ecuación:
v
REF 2
( sL KUSv1)
donde 5 es el ángulo de giro; KUS es un coeficiente de subviraje; L es la distancia entre ejes del vehículo; ts es la relación de giro; y v1 es la velocidad longitudinal del vehículo. y ajustar, dicha cantidad de control (LP) , hasta reducir a cero la diferencia entre el índice de derrape actual (l) y dicho índice de derrape de referencia (lREF) ;
2. Un sistema como el reivindicado en la reivindicación 1, en donde dicho sistema de mejora del manejo del vehículo
(10) está configurado para determinar la velocidad de giro del vehículo (1) cuando se producen al menos una de las condiciones siguientes: el ángulo de giro (5) excede un umbral de giro predeterminado (S5) ; la velocidad operativa
(w) del pedal acelerador del vehículo excede un umbral de velocidad operativa del pedal predeterminado (Sw) ; y la velocidad longitudinal del vehículo (v1) excede un umbral de velocidad predeterminado (Sv1) .
3. Un sistema como el reivindicado en una cualquiera de las reivindicaciones anteriores, en donde dicho sistema de mejora del manejo del vehículo (10) comprende un controlador principal (14) el cual recibe dicha diferencia entre el índice de derrape actual (l) y dicho índice de derrape de referencia (lREF) y proporciona dicha cantidad de control (LP) basándose en dicha diferencia; y un bloque observador (11) que activa a dicho controlador principal (14) para generar dicha cantidad de control (LP) , cuando dicha aceleración de giro del vehículo (1) es determinada.
4. Un sistema como el reivindicado en la reivindicación 3, en donde dicha cantidad de control (LP) corresponde al gradiente de presión (LP) , estando configurado dicho controlador principal (14) para formar, junto con el sistema de control de estabilidad (7) , un bucle de control cerrado para regular, dicho gradiente de presión (LP) , hasta reducir a cero la diferencia entre el índice de derrape de referencia (lREF) y dicho índice de derrape actual (l) .
5. Un sistema como el reivindicado en la reivindicación 4, en donde dicho sistema de mejora del manejo (10) del vehículo comprende medios de control de bucle abierto (12) configurados para generar un parámetro de gradiente relacionado con un gradiente de presión (LP1) relacionado con la presión de frenado a aplicar al conjunto de frenado (3) .
6. Un sistema como el reivindicado en la reivindicación 5, en donde dicho bloque observador (11) está configurado para generar un comando de activación (CT) cuando se detecta la aceleración de giro; dichos medios de control de bucle abierto (12) reciben dicho comando de activación (CT) generado por el bloque observador (11) , la velocidad longitudinal (v1) del vehículo, el índice de derrape (l) medido por un sensor en el vehículo (1) , y el ángulo de giro (5) , y calculan un gradiente de presión (LP1) de acuerdo con la siguiente ecuación:
1) Pavb c
donde a, b y c son parámetros predeterminados.
7. Un sistema como el reivindicado en la reivindicación 6, en donde dicho sistema de mejora del manejo del vehículo (10) comprende un módulo adicional (15) el cual recibe el gradiente de presión (LP1) generado por el bloque de control de bucle abierto (12) , y el gradiente de presión (LP2) generado por el controlador principal (14) , y suministra un gradiente de presión total (LP = LP1 + LP2) a dicho sistema de control de estabilidad (7) .
8. Un sistema de acuerdo con cualquiera de las reivindicaciones anteriores, en donde dicho sistema de control de la estabilidad (7) del vehículo comprende un sistema de Control de Estabilidad Electrónico ESC.
Parámetros de control de estabilidad
acc. Acción de observador
controlpreventivo
controlador
ref. generador
Patentes similares o relacionadas:
Dispositivo de control de frenado y vehículo del tipo de montar a horcajadas que lo comprende, del 13 de Noviembre de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de control de frenado para un vehículo del tipo de montar a horcajadas que tiene una primera rueda , que comprende: un primer dispositivo […]
 Sistema de freno y procedimiento de frenado para un freno de fricción no lineal de accionamiento eléctrico, del 2 de Enero de 2019, de VE Vienna Engineering Forschungs- und Entwicklungs GmbH: Procedimiento de para accionar un freno de fricción de accionamiento eléctrico con un comportamiento no lineal de fuerza-desplazamiento, […]
Sistema de freno y procedimiento de frenado para un freno de fricción no lineal de accionamiento eléctrico, del 2 de Enero de 2019, de VE Vienna Engineering Forschungs- und Entwicklungs GmbH: Procedimiento de para accionar un freno de fricción de accionamiento eléctrico con un comportamiento no lineal de fuerza-desplazamiento, […]
Procedimiento para advertir al conductor de un vehículo de un riesgo de vuelco y dispositivo de control con esta finalidad, del 13 de Diciembre de 2017, de WABCO GMBH: Procedimiento para advertir al conductor de un vehículo de un riesgo de vuelco del vehículo sobre su eje longitudinal, registrando un dispositivo […]
Dispositivo de control para un sistema de frenado de un vehículo, sistema de frenado para un vehículo y método para operar un sistema de frenado de un vehículo, del 9 de Agosto de 2017, de ROBERT BOSCH GMBH: 1. Dispositivo de control para un sistema de frenado de un vehículo, con un aparato de control , mediante el cual el sistema de […]
Procedimiento de frenado automático de un vehículo automóvil, del 12 de Julio de 2017, de PSA Automobiles SA: Procedimiento de frenado automático de un vehículo automóvil, que pone en práctica una función de gestión de la dinámica longitudinal del vehículo , […]
Dispositivo de control de freno escalonado para reventón de neumático de vehículo y método de control del mismo, del 18 de Enero de 2017, de Zhejiang Geely Automobile Research Institute Co., Ltd: Un dispositivo de control de freno escalonado para reventón de neumático de vehículo, incluyendo un sensor de presión de neumático para detectar un […]
Procedimiento y dispositivo para estabilizar la marcha de un remolque que se mueve a bandazos, del 21 de Septiembre de 2016, de AUDI AG: Procedimiento para estabilizar la marcha de un remolque que se mueve a bandazos arrastrado por un vehículo, en el que se frena automáticamente […]
Procedimiento y sistema de frenado para el control de estabilidad de un vehículo, del 13 de Julio de 2016, de CONTINENTAL TEVES AG & CO. OHG: Procedimiento en el que se regula la estabilidad de conducción de un vehículo, en donde se influye sobre una diferencia de tasa de derrape por medio de un momento […]