MÉTODOS Y SISTEMAS PARA NAVEGAR BAJO EL AGUA.
Un método para determinar la posición absoluta bajo el agua de una embarcación sumergible (1) que tiene un sistema de navegación de reconocimiento aislado o incomunicado,
que no recibe información de posición desde el exterior de la embarcación, de tal manera que la embarcación recibe señales acústicas procedentes de una estación de referencia (34) que tiene una posición absoluta conocida, y calcula su distancia de separación desde la estación de referencia, caracterizado por que se reciben señales procedentes de una estación de referencia (34) en dos o más posiciones de la embarcación (1); por que se obtienen datos de velocidad de cambio de la distancia (la velocidad de variación de distancia de separación) de la embarcación, a partir de dichas señales acústicas; y por que se calculan posiciones absolutas estimadas de la embarcación utilizando dicha distancia de separación calculada y dicha velocidad de variación de distancia de separación, y utilizando datos de posición relativa procedentes del sistema de navegación de reconocimiento incomunicado
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DK2001/000141.
Solicitante: ATLAS ELEKTRONIK GMBH.
Nacionalidad solicitante: Alemania.
Dirección: SEBALDSBRUCKER HEERSTRASSE 235 28305 BREMEN ALEMANIA.
Inventor/es: LARSEN,MIKAEL,BLIKSTED.
Fecha de Publicación: .
Fecha Solicitud PCT: 2 de Marzo de 2001.
Fecha Concesión Europea: 8 de Septiembre de 2010.
Clasificación Internacional de Patentes:
- G01C21/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
- G01S15/87D
- G01S5/18 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › que utilizan ondas ultrasonoras, sonoras, o infrasonoras.
Clasificación PCT:
- G01C21/00 G01C […] › Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
- G01S5/18 G01S 5/00 […] › que utilizan ondas ultrasonoras, sonoras, o infrasonoras.
Clasificación antigua:
- G01C21/00 G01C […] › Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
- G01S5/18 G01S 5/00 […] › que utilizan ondas ultrasonoras, sonoras, o infrasonoras.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
La invención se refiere a un método y a un sistema para determinar la posición absoluta bajo el agua de una embarcación sumergible, tal como, por ejemplo, un submarino no tripulado y accionado autónomamente, así como a un método para barrer o explorar un área de supervisión bajo el agua.
La embarcación sumergible es del tipo que tiene un sistema de navegación de reconocimiento aislado o incomunicado, que no recibe información de posición del exterior de la embarcación, y la embarcación recoge datos por medio de señales acústicas procedentes de una estación de referencia que tiene una posición absoluta conocida, y calcula su distancia desde la estación de referencia por medios de computación, preferiblemente, una computadora instalada a bordo.
Se conocen diversos métodos y sistemas para determinar de forma inequívoca la posición de una embarcación o de un vehículo sobre la superficie de la tierra o la superficie del mar. Como ejemplos, pueden mencionarse los sistemas de navegación por satélite conocidos de forma generalizada (GPS [Sistema de Localización Global –“Global Positioning System”]; NAVSTAR [Regulación Temporal y de Alcance vía Satélite para Navegación –“Navigation Satellite Timing and Ranging”]; GLONASS [Sistema vía Satélite para Navegación por Órbitas Globales –“Global Orbiting Navigation Satellite System”]), y los sistemas DECCA y LORAN previamente conocidos.
Tales sistemas están basados, casi universalmente, en señales de radio de onda corta y, por tanto, no son utilizables bajo el agua debido a la muy mala propagación de tales señales de radio a través del agua, especialmente, el agua de mar.
Se conocen sistemas para la comunicación y/o la navegación bajo el agua por medio de señales de radio de onda muy larga, pero tales sistemas no ofrecen propiedades necesarias para una navegación comercial precisa, tales como la disponibilidad, la resolución y la precisión.
Un principio y un sistema para la navegación acústica bajo el agua a lo largo de distancias limitadas se conoce como “Navegación de línea de base larga” (“Long Base Line Navigation”) (designada más adelante como “LBL”); véase, por ejemplo, la divulgación de Jerome Vaganay et al.: “Rechazo de datos atípicos o extremos para navegación acústica autónoma” (“Outlier Rejection for Autonomous Acoustic Navigation”), Proc. IEEE [Instituto de Ingenieros Eléctricos y Electrónicos –“Institute of Electrical and Electronics Engineers”] Int'I. Conf. Robotics and Automation [I. Conferencia de Robótica y Automática], Minneapolis (US), abril de 1996, o, para una exposición más exhaustiva, la divulgación de P. H. Milne: “Sistemas de localización acústica bajo el agua” (“Underwater Accoustic Positioning Systems”), Gulf Publishing Company (US), 1983, ISBN 0-87201-012-0.
Utilizando LBL, se establece un cierto número de puntos de referencia al colocar, por ejemplo, unos transponedores en el fondo marino formando una red o conjunto geométricamente ordenado. Tales transponedores están configurados para que cada uno de ellos transmita una señal acústica individual cuando reciben una señal acústica común.
Se conoce también el uso para este propósito, por ejemplo, de balizas acústicas, que sencillamente transmiten señales acústicas de un modo autónomo.
Cuando una embarcación sumergida ha de determinar su posición con respecto a tal red de transponedores, la embarcación transmite una señal de interrogación acústica a una frecuencia común. Al recibir la señal de interrogación, cada transponedor transmite una señal de respuesta en su propia frecuencia individual, tras un retardo individual predeterminado.
Las señales de respuesta son recogidas por unos micrófonos acuáticos o hidrófonos dispuestos en la embarcación, y un sistema instalado a bordo analiza los retardos temporales de las señales de respuesta que retornan y calcula la distancia a cada transponedor; basándose en ello, puede determinarse de forma inequívoca la posición de la embarcación con respecto a las posiciones de los transponedores, siempre y cuando se satisfagan ciertas condiciones por lo que respecta al número y posición de los transponedores.
La posición de cada transponedor puede determinarse, por ejemplo, como se describe en la divulgación de Milne, párrafo 5.2, páginas 55 y siguientes. A menudo, una unidad con un equipo acústico similar al de la embarcación sumergible se suspende de una embarcación de superficie que tiene medios de determinación de la posición absoluta tales como navegación por GPS. La embarcación de superficie se sitúa en diferentes posiciones, determinadas por medio del sistema de navegación. Desde cada una de estas posiciones, la unidad intercambia señales con los transponedores, según se ha explicado. Basándose en un número suficientemente alto de conjuntos de registros de retardo procedentes de estas diferentes posiciones conocidas, pueden calcularse entonces las posiciones de cada transponedor con una precisión satisfactoria.
En algunos sistemas de LBL conocidos, los transponedores son capaces de determinar la distancia unos de otros. Esto elimina la necesidad de determinar la posición de cada transponedor desde la superficie; cuando las posiciones de unos pocos transponedores con suficiente separación son conocidas, pueden determinarse por simple triangulación las posiciones del resto de los transponedores.
Es una desventaja de la navegación de LBL el hecho de que sea necesaria la colocación y calibración de un gran número de transponedores, al ser los transponedores a menudo muy caros y no recuperarse siempre con éxito tras una misión. Se necesita un mínimo de tres transponedores para que sea posible determinar una posición cualquiera, según se desprende de Milne, Capítulo 5, en particular, de la sección 5.2.
En el pliego de conferencia de A. Ph. Scherbatjuk: “La localización de AUV utilizando distancias de separación desde LBL de un único transponedor” (“The AUV Positioning using Ranges from One Transponder LBL”), OCEANS '95, MTS/IEEE Proceedings of ‘Challenges of Our Changing Global Environment' [Procedimientos de MTS/IEEE sobre ‘Desafíos de nuestro entorno global cambiante'], 1995, ISBN 0933957149, Vol. 3, págs. 1620-1623, se efectúa una divulgación sobre la navegación o gobierno de un vehículo submarino utilizando datos de distancia de separación desde un único transponedor de tipo de LBL.
En este pliego se exigen, sin embargo, severas restricciones sobre las áreas de supervisión utilizables y sobre las trayectorias del vehículo submarino. Es, por tanto, una condición previa para el uso del método divulgado que el vehículo opere a una profundidad constante y siga trayectorias conformadas en forma de meandros regulares constituidos enteramente por líneas rectas. Se establece explícitamente en el sumario del pliego que la “aplicación de trayectorias en forma de meandros no constituye una seria limitación para el uso del método ...”.
De esta forma, el autor admite que su método sólo funcionará si se están teniendo en cuenta estas restricciones.
Por supuesto, el método que se divulga en este pliego no será de uso general, contrariamente a la aseveración del autor, puesto que la mayor parte de las tareas subacuáticas implicarán, ciertamente, que el vehículo subacuático siga muchas trayectorias conformadas de manera diferente.
En el pliego de conferencia de Richard J. Babb: “Navegación de vehículos subacuáticos no tripulados para seguimientos científicos” (“Navigation of Unmanned Underwater Vehicles for Scientific Surveys”), AUV '90, IEEE Proceedings of the Symposium on Autonomous Underwater Vehicle Technology [Procedimientos de IEEE del Simposio sobre tecnología de vehículos subacuáticos autónomos], 1990, págs. 194-198, se sugiere, en su Sección 4, combinar LBL con Reconocimiento Insonoro (al que se hace referencia más adelante como “DR” –“Dead Reckoning”). DR puede, por ejemplo, comprender el uso de un indicador de velocidad acústico que mide la velocidad relativa con respecto al fondo marino, y/o el uso de un Sistema de Navegación Inercial (al que se hace referencia en lo que sigue como “INS” –“Inertial Navigation System”).
Con ello,...
Reivindicaciones:
1. Un método para determinar la posición absoluta bajo el agua de una embarcación sumergible (1) que tiene un sistema de navegación de reconocimiento aislado o incomunicado, que no recibe información de posición desde el exterior de la embarcación, de tal manera que la embarcación recibe señales acústicas procedentes de una estación de referencia (34) que tiene una posición absoluta conocida, y calcula su distancia de separación desde la estación de referencia,
caracterizado por que
se reciben señales procedentes de una estación de referencia
(34) en dos o más posiciones de la embarcación (1); por que se obtienen datos de velocidad de cambio de la distancia (la velocidad de variación de distancia de separación) de la embarcación, a partir de dichas señales acústicas; y por que se calculan posiciones absolutas estimadas de la embarcación utilizando dicha distancia de separación calculada y dicha velocidad de variación de distancia de separación, y utilizando datos de posición relativa procedentes del sistema de navegación de reconocimiento incomunicado.
2. Un método de acuerdo con la reivindicación 1, en el cual dichos datos de velocidad de variación de distancia de separación se deducen de grabaciones o registros de corrimientos Doppler en frecuencias de las señales acústicas procedentes de la estación de referencia.
3. Un método de acuerdo con la reivindicación 1, en el cual dichos datos de velocidad de variación de distancia de separación se deducen de discrepancias temporales en los tiempos de llegada de impulsos de espectro extendido incluidos dentro de las señales acústicas procedentes de la estación de referencia.
4. Un método de acuerdo con cualquiera de las reivindicaciones precedentes, en el cual se reciben señales y se procesan
o tratan datos a cortos intervalos de tiempo, lo que hace posible una estimación sustancialmente continua de la posición absoluta.
5. Un método de acuerdo con cualquiera de las reivindicaciones precedentes, en el cual se estima la posición de la estación de referencia (19; 34; 45; 76) en un sistema de coordenadas
relativas de dicho sistema de navegación de reconocimiento incomunicado.
6. Un método de acuerdo con cualquiera de las reivindicaciones precedentes, en el cual los datos de posición absoluta estimada se utilizan para actualizar los datos de posición relativa del sistema de reconocimiento incomunicado.
7. Un método de acuerdo con cualquiera de las reivindicaciones precedentes, en el cual se realizan estimaciones de parámetros intrínsecos a la naturaleza del sistema de navegación de reconocimiento incomunicado, tales como las corrientes marinas, y los datos de posición relativa procedentes del sistema de navegación de reconocimiento incomunicado son compensados por la estimación de dichos parámetros.
8. Un método de acuerdo con cualquiera de las reivindicaciones precedentes, en el cual se utiliza un algoritmo de mínimos cuadrados para determinar los valores de las estimaciones.
9. Un método de acuerdo con cualquiera de las reivindicaciones precedentes, en el cual se utiliza un filtro de Kalman para determinar los valores de las estimaciones.
10. Un método de acuerdo con cualquiera de las reivindicaciones precedentes, en el cual dichas estimaciones se realizan, adicionalmente, utilizando información sobre la profundidad de la estación de referencia.
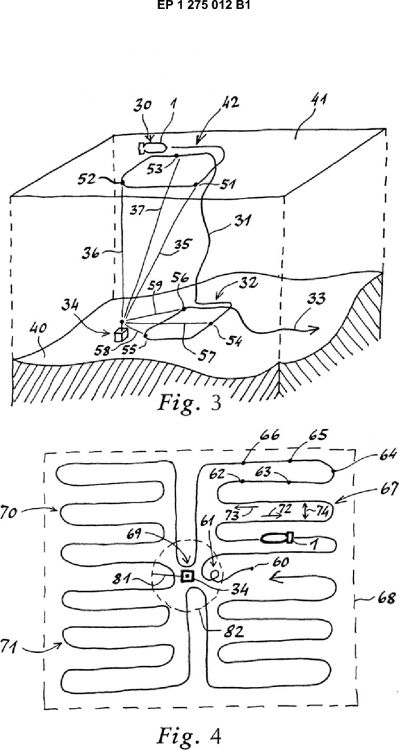
11. Un método para explorar o barrer un área de supervisión subacuática (68) por medio de una embarcación sumergible (1) que se desplaza por un recorrido deseado, de tal manera que la embarcación tiene un sistema de navegación de reconocimiento incomunicado que no recibe información de posición desde el exterior de la embarcación, en el cual la embarcación recibe señales acústicas desde una estación de referencia (34) que tiene una posición absoluta conocida, y calcula su distancia de separación desde la estación de referencia,
caracterizado por que
la posición absoluta de la embarcación se determina de forma intermitente de acuerdo con el método de la reivindicación 1.
12. Un método de acuerdo con la reivindicación 11, en el cual el área se extiende más allá del alcance operativo (81) de la estación de referencia (34), y la trayectoria (67; 70; 71) pretendida para la
embarcación se dispone de manera que lleve la embarcación dentro de dicho alcance operativo a intervalos uniformes de tiempo.
13. Un método de acuerdo con la reivindicación 11 o la reivindicación 12, en el cual la trayectoria pretendida para la embarcación se dispone de manera que lleve la embarcación dentro de una distancia mínima a cada punto del área.
14. Un método de acuerdo con cualquiera de las reivindicaciones precedentes, en el cual la estación de referencia está situada en una posición absoluta fija.
15. Un método de acuerdo con cualquiera de las reivindicaciones precedentes, en el cual la posición absoluta de la estación de referencia (34) se determina por la embarcación sumergible, en la superficie del agua, al recoger esta datos de posición absoluta en un cierto número de posiciones (51-53) con respecto a un sistema de localización utilizable en la superficie del agua, y al recibir, mientras está en la superficie, señales acústicas provenientes de la estación de referencia, y calcular datos de distancia de separación a partir de dichas señales, de manera que los datos de posición y de distancia de separación se procesan o tratan, preferiblemente, a bordo del vehículo.
16. Un método de acuerdo con cualquiera de las reivindicaciones precedentes, en el cual la estación de referencia (45) se lanza (44) desde la embarcación sumergible (1).
17. Un método de acuerdo con cualquiera de las reivindicaciones precedentes, en el cual la estación de referencia es recogida por la embarcación sumergible tras estimar una posición absoluta.
18. Un método de acuerdo con cualquiera de las reivindicaciones precedentes, en el cual la estación de referencia comprende un transponedor acústico.
19. Un método de acuerdo con cualquiera de las reivindicaciones 1-17, en el cual la estación de referencia comprende una baliza acústica.
20. Un método de acuerdo con cualquiera de las reivindicaciones precedentes, pero, sin embargo, sin dependencia de la reivindicación 15, en el cual la estación de referencia se sitúa en la superficie del agua, preferiblemente en una boya (76) o en una embarcación.
21. Un método de acuerdo con la reivindicación 20, en el cual la estación de referencia (76) recibe datos de posición absoluta desde un sistema de localización utilizable en la superficie del agua, y reemite dichos datos a la embarcación sumergible.
22. Un método de acuerdo con la reivindicación 20 o la reivindicación 21, en el cual la estación de referencia (76) intercambia datos de comunicación con un sistema de comunicación utilizable en la superficie del agua, y, preferiblemente, intercambia también dichos datos con la embarcación sumergible.
23. Un método de acuerdo con cualquiera de las reivindicaciones 20-22, en el cual la estación de referencia se coloca en una embarcación sumergible que se sitúa en superficie durante el uso de la estación de referencia.
24. Un sistema para determinar la posición absoluta bajo el agua de una embarcación sumergible (1) por medio del método de acuerdo con la reivindicación 1, de tal modo que el sistema comprende:
- una estación de referencia (34), que tiene medios de comunicación acústica;
- medios de comunicación acústica emplazados a bordo de la embarcación;
- un sistema de navegación de reconocimiento incomunicado, emplazado a bordo de la embarcación;
estando el sistema caracterizado por que
comprende adicionalmente medios de computación,
preferiblemente emplazados a bordo de la embarcación y destinados a estimar datos de posición absoluta a partir de dos o más recepciones de señales procedentes de una misma estación de referencia, conjuntamente con datos de posición relativa procedentes del sistema de navegación de reconocimiento incomunicado, y configurados para obtener la velocidad de cambio de la distancia (la velocidad de variación de distancia de separación) de la embarcación desde la estación de referencia, a partir de dichas señales acústicas.
25. Un sistema de acuerdo con la reivindicación 24, en el cual el sistema de reconocimiento incomunicado comprende un Sistema de Navegación Inercial.
26. Un sistema de acuerdo con cualquiera de las reivindicaciones 24 o 25, en el cual el sistema de reconocimiento
incomunicado comprende:
- un cierto número de giróscopos;
- un cierto número de acelerómetros;
- un indicador Doppler de velocidad con respecto al suelo;
5 - un sensor de medición directa o indirecta de la velocidad del sonido; y
- un sensor de presión.
27. Un sistema de acuerdo con cualquiera de las reivindicaciones 24-26, en el cual la embarcación sumergible está configurada para transportar un cierto número de estaciones de referencia (45) y para lanzar (44) las estaciones de forma independiente.
28. Un sistema de acuerdo con cualquiera de las reivindicaciones 24-27, en el cual la embarcación sumergible está configurada para recoger un cierto número de estaciones de referencia.
15 29. Un sistema de acuerdo con cualquiera de las reivindicaciones 24-28, en el cual las estaciones de referencia son transponedores o boyas acústicas que descansan sobre el fondo del mar o están suspendidas por encima de un ancla que descansa en el fondo del mar.
30. Un sistema de acuerdo con cualquiera de las reivindicaciones 24-28, en el cual las estaciones de referencia (76) están situadas en boyas o embarcaciones que flotan sobre la superficie del agua.
Patentes similares o relacionadas:
Captación de corredor, del 29 de Abril de 2020, de nearmap australia pty, ltd: Un método para crear un ortomosaico de un área de corredor que consiste en una faja de tierra o de agua a lo largo de una trayectoria arbitraria , área […]
 Procedimiento para mejorar la precisión de un sistema de navegación en base a radio, del 25 de Marzo de 2020, de SAAB AB: Un procedimiento para mejorar la precisión de un sistema de navegación en base a radio para corregir una posición dada por dicho sistema […]
Procedimiento para mejorar la precisión de un sistema de navegación en base a radio, del 25 de Marzo de 2020, de SAAB AB: Un procedimiento para mejorar la precisión de un sistema de navegación en base a radio para corregir una posición dada por dicho sistema […]
Sistema y método para medir un desplazamiento de una plataforma móvil, del 18 de Marzo de 2020, de SZ DJI Technology Co., Ltd: Un metodo para detectar un desplazamiento de una plataforma movil, que comprende: obtener un primer marco (811a) y un segundo marco (811b) con un dispositivo […]
Un método y sistema implementados por ordenador para generar una trayectoria 3D a una ubicación de aterrizaje para un vehículo aéreo, del 1 de Enero de 2020, de THE BOEING COMPANY: Un sistema para generar una trayectoria 3D a partir de un origen a un destino para un vehículo aéreo (AV), el sistema comprende: - una unidad de gestión […]
Navegación vehicular basada en datos de calidad de sensor específicos del sitio, del 23 de Octubre de 2019, de DEERE & COMPANY: Un método para determinar la localización de un vehículo, el método que comprende: determinar los datos de localización de recepción dentro de una celda de un área […]
Navegación basada en al menos un sensor y un mapa 3D, del 16 de Octubre de 2019, de Vricon Systems Aktiebolag: Un procedimiento de navegación de un vehículo aéreo, comprendiendo el procedimiento la provisión de una imagen de sensor a partir de un […]
Procedimiento de provisión de información de ruta y dispositivo electrónico para procesar el mismo, del 17 de Julio de 2019, de SAMSUNG ELECTRONICS CO., LTD.: Un procedimiento de operación de un dispositivo electrónico, que comprende: determinar por al menos un sensor una ubicación presente como una […]
Múltiples grupos de control de enlace de radio (RLC), del 15 de Mayo de 2019, de Intel IP Corporation: Un equipo de usuario, UE, capaz de agregación de portadoras, CA, configurado para procesar el flujo de control de enlace de radio, RLC, dicho UE […]