Procedimiento y sistema de verificación de las prestaciones en precisión de un sistema de navegación por satélite.
Procedimiento de verificación de la prestación de precisión en la localización de un sistema de navegación por satélite que comprende un segmento espacial que emite unas señales de radiolocalización hacia un segmento receptor,
caracterizado porque comprende las etapas siguientes:
- Una etapa previa de medición del error estimado de localización de un receptor del sistema para una pluralidad de muestras y de cálculo del umbral de error máximo de localización, denominado radio de protección, que se pueda garantizar por el sistema para dichas muestras, siendo definidos el error estimado y el radio de protección en una dimensión de una orientación de posición,
- Una etapa de cálculo de un primer porcentaje (1) de muestras que verifican las condiciones siguientes:
i. el radio de protección (XPL) es inferior a un umbral de alerta (J),
ii. el cociente del radio de protección y del error estimado de localización (XPL/XNSE) es superior a un cociente de seguridad (J/K), siendo el cociente de seguridad la relación entre el umbral de alerta (J) y un nivel de exigencia de error estimado (K),
- Una etapa de cálculo de un segundo porcentaje (2) de muestras que verifican las condiciones siguientes:
i. el radio de protección (XPL) es inferior al umbral de alerta (J),
ii. el cociente del radio de protección y del error estimado de localización (XPL/XNSE) es inferior al cociente de seguridad (J/K),
iii. el error estimado de localización (XNSE) es inferior al nivel de exigencia de error estimado (K),
- Una etapa de control de comparación del primer y del segundo porcentajes de muestras (1, 2) con un porcentaje de exigencia para verificar la prestación en precisión del sistema de navegación por satélite.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11156585.
Solicitante: THALES.
Nacionalidad solicitante: Francia.
Dirección: 45, RUE DE VILLIERS 92200 NEUILLY SUR SEINE FRANCIA.
Inventor/es: LEVY,JEAN-CHRISTOPHE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S19/20 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › Monitorización de la integridad, detección o aislamiento de fallos del segmento espacial.
PDF original: ES-2392816_T3.pdf
Fragmento de la descripción:
Procedimiento y sistema de verificación de las prestaciones en precisión de un sistema de navegación por satélite
La presente invención se refiere al dominio de los sistemas de navegación por satélite y, más particularmente, a un procedimiento de verificación de la prestación de la precisión de un sistema de ese tipo.
Actualmente, los servicios comerciales que explotan los sistemas de navegación por satélite se desarrollan considerablemente. Los productos que funcionan a partir de señales de radiolocalización se han democratizado ampliamente en la cotidianeidad de los hogares en el seno de los vehículos automóviles para la ayuda a la navegación por carretera en unos primeros momentos y en estos últimos tiempos en el seno de dispositivos de telefonía móvil para una multitud de servicios personales. Las evoluciones de los futuros sistemas de posicionamiento por satélite, por ejemplo el sistema europeo GALILEO, prometen unas prestaciones muy superiores a los sistemas actuales. Así nuevos servicios que no se podían diseñar por falta suficiente de fiabilidad y de precisión de posicionamiento pueden hoy en día ver la luz para las empresas, particularmente las empresas de transporte por carretera y de transporte aéreo. Por ejemplo, para el transporte por carretera, se busca transformar los modelos económicos de los servicios de explotación de las secciones de carreteras de peaje ofreciendo unas ofertas personalizadas al cliente. Para las compañías de transporte aéreo, las crecientes prestaciones en fiabilidad y precisión del posicionamiento permiten integrar en el seno de las aeronaves unos dispositivos de navegación en los que se podrán apoyar completamente los pilotos. Estos dispositivos permitirán mejorar considerablemente la seguridad del transporte aéreo. No obstante, para los servicios de los que depende la seguridad de las personas, es obligatorio probar la fiabilidad de los datos transmitidos por el sistema de posicionamiento. Esto es por lo que las autoridades someten a los operadores de los sistemas de navegación por satélite a unas exigencias de garantía de servicio al terminal del cliente.
Los sistemas de navegación por satélite se caracterizan por los datos de prestación en cuanto a integridad, precisión y cobertura. La integridad es una medida de la confianza en la información suministrada por el sistema de posicionamiento por satélite. Una herramienta bien conocida para determinar la integridad de un punto proporcionado es el diagrama de Stanford. El diagrama de Stanford es una matriz en dos dimensiones cuyo parámetro de entrada sobre el eje horizontal es el error de posición observado en vertical u horizontal y cuyo parámetro de entrada sobre el eje vertical es el nivel de protección en vertical u horizontal calculado a partir de modelos estadísticos. Este diagrama permite verificar la proporción de las muestras medidas cuyo error de posición observado sea más reducido que el nivel de protección.
El artículo de B. Vassileva et ál. “SBAS Vertical Protection Level Assessment in the case of Error Reduction”, Modern Computing, 2006. JVA ’06. IEEE John Vincnet Atanasoff 2006 International Symposium On, IEEE, PI, 1 de octubre de 2006, páginas 137-142, XP031035961, ISBN:978-0-7695-2643-0, presenta un algoritmo de filtrado de errores de localización de un sistema de navegación por satélite basado en el estudio de los parámetros de integridad y la relación entre el radio de protección (PL) y el error de posición (PE) con relación a unos umbrales de alerta (AL) .
La precisión de una posición se define por el error de posición estimado con relación a la posición real. La precisión de localización depende particularmente del error de la distancia estimada entre el usuario y los satélites recibidos así como de la configuración de la geometría de las medidas. Existe un valor indicativo de las condiciones de la geometría de las medidas comúnmente denominado DOP de “Dilation of Precision” en inglés. Cuando el valor de la DOP es elevado, esto indica que los satélites utilizados para obtener la posición están próximos y por lo tanto que la geometría es mala y cuando el valor de la DOP es reducido esto indica que los satélites utilizados para obtener la posición están alejados y por tanto que la geometría es buena.
Los organismos encargados de las reglamentaciones y de los controles relativos a la aviación civil exigen unos niveles de prestaciones rigurosos particularmente en la prestación de precisión para los servicios críticos. Entre estos servicios críticos que explotan los datos de la geolocalización de los sistemas de posicionamiento por satélite, el servicio LPV200 (“Localizer Performance with Vertical Guidance”) exige que el sistema de posicionamiento por satélite muestre durante al menos el 95% del tiempo un error de localización vertical inferior a 4 metros y en horizontal inferior a 16 metros. Además, este servicio exige que la probabilidad de proporcionar un error de localización en vertical superior a 10 metros sea inferior a 10-7 en condiciones normales y que la probabilidad de proporcionar un error de localización superior a 15 metros sea inferior a 10-5 en condición degradada. Este servicio está asociado a un nivel de alerta en vertical de 35 metros y en horizontal de 40 metros.
Los niveles de precisión certificados se han obtenido mediante medición de muestras en unas condiciones de extracción conocidas, particularmente en la geometría de medición. O, actualmente no existe una herramienta de medición de la precisión que permita certificar al usuario estos niveles de exigencia porque la prestación de la precisión depende igualmente de la geometría de los satélites y de los datos recogidos que no tienen en cuenta todos los casos de geometría de los satélites para cada usuario.
Una solución implementada por el operador del servicio del sistema de posicionamiento por satélite americano para certificar un nivel de precisión a cada usuario y teniendo en cuenta todas las configuraciones de geometría de los satélites ha sido recoger unos datos en un periodo de larga duración. Durante tres años se han recogido unos datos
de los satélites con el fin de poder afirmar que se han observado todos los casos de geometría de los satélites. No obstante, éste procedimiento presenta la desventaja de movilizar unos recursos importantes, y además no garantizar que todos los casos se hayan podido observar.
El objetivo de la invención es proporcionar una herramienta de control de las prestaciones en precisión del sistema
de posicionamiento por satélite con el fin de poder verificar que el sistema responde a las exigencias impuestas por las aplicaciones críticas para cada usuario, cualquiera que sean las condiciones de observación de las señales de radiolocalización.
Más precisamente, la invención se refiere a un procedimiento de verificación de la prestación de precisión en la localización de un sistema de navegación por satélite que comprende un segmento espacial que emite unas señales 10 de radiolocalización hacia un segmento receptor. El procedimiento comprende las etapas siguientes:
- Una etapa previa de medición del error estimado de localización del receptor del sistema para una pluralidad de muestras y de cálculo del umbral del error máximo de localización, denominado radio de protección, que se pueda garantizar por el sistema para dichas muestras, siendo definidos el error estimado y el radio de protección en una dimensión de una señal de posición,
- Una etapa de cálculo de un primer porcentaje de muestras que verifican las condiciones siguientes:
i. el radio de protección es inferior a un umbral de alerta,
ii. el cociente del radio de protección y del error estimado de localización es superior a un cociente de seguridad, siendo el cociente de seguridad la relación entre el umbral de alerta y un nivel de exigencia de error estimado,
- Una etapa de cálculo de un segundo porcentaje de muestras que verifican las condiciones siguientes:
i. el radio de protección es inferior al umbral de alerta,
ii. el cociente del radio de protección y del error estimado de localización es inferior al cociente de seguridad,
iii. el error estimado de localización es inferior al nivel de exigencia de error estimado,
- Una etapa de control de comparación... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de verificación de la prestación de precisión en la localización de un sistema de navegación por satélite que comprende un segmento espacial que emite unas señales de radiolocalización hacia un segmento receptor, caracterizado porque comprende las etapas siguientes:
- Una etapa previa de medición del error estimado de localización de un receptor del sistema para una pluralidad de muestras y de cálculo del umbral de error máximo de localización, denominado radio de protección, que se pueda garantizar por el sistema para dichas muestras, siendo definidos el error estimado y el radio de protección en una dimensión de una orientación de posición,
- Una etapa de cálculo de un primer porcentaje (1) de muestras que verifican las condiciones siguientes:
i. el radio de protección (XPL) es inferior a un umbral de alerta (J) ,
ii. el cociente del radio de protección y del error estimado de localización (XPL/XNSE) es superior a un cociente de seguridad (J/K) , siendo el cociente de seguridad la relación entre el umbral de alerta (J) y un nivel de exigencia de error estimado (K) ,
- Una etapa de cálculo de un segundo porcentaje (2) de muestras que verifican las condiciones siguientes:
i. el radio de protección (XPL) es inferior al umbral de alerta (J) ,
ii. el cociente del radio de protección y del error estimado de localización (XPL/XNSE) es inferior al cociente de seguridad (J/K) ,
iii. el error estimado de localización (XNSE) es inferior al nivel de exigencia de error estimado (K) ,
- Una etapa de control de comparación del primer y del segundo porcentajes de muestras (1, 2) con un porcentaje de exigencia para verificar la prestación en precisión del sistema de navegación por satélite.
2. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque comprende igualmente una etapa de cálculo de un tercer porcentaje (3) de muestras que verifican las condiciones siguientes:
i. el radio de protección (XPL) es inferior al umbral de alerta (J) ,
ii. el cociente del radio de protección y del error estimado de localización (XPL/XNSE) es inferior al cociente de seguridad (J/K) ,
iii. el error estimado de localización (XNSE) es superior al nivel de exigencia de error estimado (K) ,
3. Procedimiento de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque comprende igualmente una etapa de cálculo de un cuarto porcentaje (4) de muestras que verifican las condiciones siguientes:
i. el radio de protección (XPL) es superior al umbral de alerta (J) ,
ii. el error estimado de localización (XNSE) es superior al nivel de exigencia de error estimado (K) ,
4. Procedimiento de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque comprende igualmente una etapa de cálculo de un quinto porcentaje (5) de muestras que verifican las condiciones siguientes:
i. el radio de protección (XPL) es superior al umbral de alerta (J) ,
ii. el error estimado de localización (XNSE) es inferior al nivel de exigencia de error estimado (K) .
5. Procedimiento de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque los porcentajes de muestras (1-5) se calculan para al menos dos niveles de exigencia de error estimado de localización.
6. Procedimiento de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque los porcentajes de muestras (1-5) se calculan para al menos dos umbrales de alerta.
7. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque, cuando la primera proporción (1) de muestras es superior a una proporción de exigencia que debe ser garantizada por un servicio de navegación a un usuario, se certifica a un usuario que el sistema de navegación respeta el nivel de servicio ligado al nivel de exigencia del error estimado de localización.
8. Sistema de verificación de la prestación de precisión en localización de un sistema de navegación por satélite, caracterizado porque es adecuado para realizar el procedimiento de acuerdo con una cualquiera de las reivindicaciones precedentes.
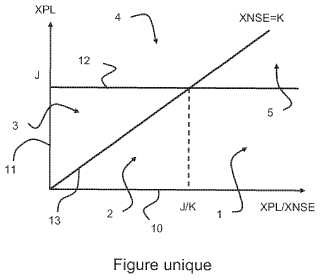
9. Sistema de acuerdo con la reivindicación 8, caracterizado porque comprende unos medios de presentación para representar en un diagrama unas muestras de localización de un receptor de un sistema de navegación por satélite, representando dicho diagrama:
- En un primer eje (10) el cociente del radio de protección (XPL) y del error estimado de localización (XNSE)
definido en una dimensión de una orientación de posición,
- En un segundo eje (11) el radio de protección (XPL) ,
- Una primera recta (13) que representa el error estimado de localización para un nivel de exigencia (K) fijo del error estimado de localización (XNSE) ,
- Una segunda recta (12) que representa el umbral de alerta (J) del radio de protección (XPL) .
10. Sistema de acuerdo con la reivindicación 9, caracterizado porque las muestras se presentan en el diagrama de acuerdo con un código de representación que depende del primer y del segundo porcentaje (1-2) de muestras.
Patentes similares o relacionadas:
Procedimiento mejorado para determinar la posición y/o la velocidad de un vehículo guiado; sistema asociado, del 27 de Marzo de 2019, de ALSTOM Transport Technologies: Un procedimiento para seleccionar un conjunto de satélites visibles utilizables (LSVU) de un conjunto de satélites visibles (LSV) de una constelación de […]
Dispositivo y procedimiento para la determinación de la posición y/o velocidad de un aparato en un sistema para la navegación por satélite, del 30 de Agosto de 2017, de MBDA Deutschland GmbH: Dispositivo para la determinación de la posición y/o velocidad de un aparato en un sistema para la navegación por satélite, que presenta una pluralidad […]
Procedimiento para mejorar de la continuidad en un sistema de navegación por satélite de doble frecuencia, del 24 de Agosto de 2016, de Airbus DS GmbH: Procedimiento para procesar un mensaje de alarma que se ha generado y transmitido por medio de un procedimiento para mejorar la continuidad en un […]
Sistema y procedimiento de determinación del error de posición de un receptor de localización satelital, del 3 de Agosto de 2016, de THALES: Sistema de determinación de una distribución de un error de posición de un receptor de señales de localización, siendo enviadas dichas señales por al menos un satélite, […]
Un algoritmo RAIM perfeccionado, del 15 de Octubre de 2014, de Airbus DS GmbH: Un método RAIM para determinar un riesgo de integridad en un GNSS procesando varias señales de medición de distancias recibidas de satélites del GNSS en que […]
Método y aparato para determinar un parámetro de indicación de integridad que indica la integridad de la información de posicionamiento determinada en un sistema de posicionamiento global, del 4 de Junio de 2014, de EUROPEAN SPACE AGENCY: Un método para determinar un parámetro de indicación de integridad (IR; PL) que indica la integridad de la información de posicionamiento determinada […]
Un método para detectar los cambios de frecuencia de reloj en un reloj a bordo de un satélite de un sistema de navegación global, del 4 de Junio de 2014, de Airbus DS GmbH: Un método para detectar saltos de frecuencia de reloj que se producen a bordo de un satélite de navegación de un sistema de navegación global, que comprende […]
Un método de reducción del impacto de los saltos de frecuencia de vehículos espaciales sobre un dispositivo de navegación global, del 26 de Febrero de 2014, de ASTRIUM GMBH: Un método de reducción del impacto de saltos de frecuencia de reloj de vehículos espaciales sobre un dispositivo para detección de posición en un sistema de navegación […]