Método y dispositivo para la detención lo mas rápida posible de la hélice de un buque accionada eléctricamente.
Método para una detención lo más rápida posible de la hélice (2) accionada eléctricamente de un buque (paradainmediata),
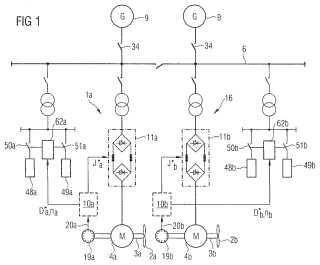
caracterizado porque la energía de frenado de, al menos, un motor eléctrico (4) del sistema depropulsión del buque (1) se realimenta como energía eléctrica a una red de a bordo (6), en donde en la paradainmediata la energía de frenado realimentada se transforma en calor, al menos parcialmente, en, al menos, unaresistencia de frenado (48,49) conectada temporalmente a la red de a bordo (6).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07022773.
Solicitante: SIEMENS AKTIENGESELLSCHAFT.
Nacionalidad solicitante: Alemania.
Dirección: WITTELSBACHERPLATZ 2 80333 MUNCHEN ALEMANIA.
Inventor/es: GEIL, GUNTER, Wietoska,Jens, de Ruiter,Robin.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63H21/17 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63H PROPULSION O GOBIERNO MARINO (propulsión de vehículos de colchón de aire B60V 1/14; especialmente adaptados para submarinos que no sean de propulsión nuclear, B63G; especialmente adaptados para torpedos F42B 19/00). › B63H 21/00 Utilización de plantas o grupos motrices de propulsión a bordo de embarcaciones. › por motor eléctrico.
- B63H21/20 B63H 21/00 […] › siendo el buque propulsado por una combinación de grupos motrices de diferentes tipos.
- B63H23/24 B63H […] › B63H 23/00 Transmisión de la energía desde la planta o grupo motriz de propulsión a los elementos propulsores (adaptación de la transmisión permitiendo la regulación en posición o en dirección de hélices B63H 5/125; transmisión entre motores de viento y elementos de propulsión B63H 13/00, en unidades de propulsión fuera borda B63H 20/14; adaptación de la transmisión que permita el reglaje de las hélices B63H 20/08). › eléctrico.
PDF original: ES-2388078_T3.pdf
Fragmento de la descripción:
Método y dispositivo para la detención lo más rápida posible de la hélice de un buque accionada eléctricamente
La presente invención hace referencia a un método y a un dispositivo para una detención lo más rápida posible de la hélice accionada eléctricamente de un buque (parada inmediata) .
Un dispositivo conforme a la clase y un método correspondiente, se conocen a partir del documento EP 1 568 601.
Las embarcaciones marítimas reciben su propulsión generalmente de una o de una pluralidad de hélices. Mientras que esta clase de hélices en el pasado se encontraban acopladas al árbol secundario de una máquina de vapor o de un motor diesel, en el caso de las embarcaciones marítimas modernas, donde los motores eléctricos son cada vez más frecuentes, el eje de hélice recibe la potencia motriz necesaria de generadores eléctricos, que se encuentran acoplados mecánicamente a máquinas de vapor (propulsión mediante energía nuclear) o motores diesel. La ventaja consiste en que en estos casos el o los generadores se pueden operar siempre con una velocidad óptima, mientras que la generación de potencia, o bien en el caso de los generadores sincrónicos, se puede controlar fácilmente mediante excitación.
Por otra parte, en el caso de una pluralidad de embarcaciones marítimas, entre otros, también en embarcaciones de pasajeros, resulta importante poder detener lo más rápido posible la o las hélices, por ejemplo, en caso de emergencia. Cuando, por ejemplo, una persona que se encontrara sobre la borda caiga al agua, donde se debe evitar que dicha persona llegue a la zona de succión de la hélice y que, de esta manera, sufra daños.
Para dicho fin, hasta el momento se han aplicado grandes sistemas de frenado mecánicos que frenan el árbol de accionamiento de una hélice según sea necesario, y que mantienen la velocidad a cero.
Sin embargo, en el caso de una maniobra de esta clase, se generan potencias de frenado y energías de frenado elevadas, dado que los momentos de inercia de masa mecánicos y giratorios del rotor del motor eléctrico, del eje del buque, y de la hélice, generan momentos antagónicos elevados debido a un tiempo de detención muy reducido, a las masas de agua que oscilan junto con la hélice, y a la hélice accionada mediante el efecto de turbina. La potencia motriz y la potencia de frenado se encuentran generalmente en el rango de los megavatios de uno o dos dígitos. La energía de frenado se encuentra generalmente en el rango de los megajulios de dos o tres dígitos. El tiempo de frenado se encuentra generalmente entre medio minuto y un minuto. Para poder admitir dicha energía de frenado en dicho periodo de tiempo reducido, se requieren discos de freno muy grandes, de varios metros de diámetro y un grosor considerable, que en el caso de una parada inmediata se calientan hasta alcanzar su temperatura de sobrecalentamiento. Por otra parte, las masas grandes de esta clase acumulan energía de rotación adicional, que en el caso de una parada inmediata se transforma, es decir, se convierte en calor. La subsiguiente inercia adicional reduce la capacidad de reacción del accionamiento en el caso de que existan modificaciones de velocidad. Además, dicha masa adicional se debe acelerar también en cada maniobra de marcha y, de esta manera, se incrementa el consumo energético del buque. Y no en último término, por el peso elevado que estos mecanismos comportan, se reduce también la capacidad de carga del buque.
A partir de dichas desventajas del estado del arte descrito, surge el problema al que se hace referencia al inicio de la presente invención, con el fin de proporcionar la opción de realizar una parada inmediata en un buque con eje de hélice accionado eléctricamente, sin que resulte necesario utilizar los sistemas de frenado mecánicos descritos anteriormente.
La solución de dicho problema se logra mediante el hecho de que durante la parada inmediata, la energía de frenado es realimentada por, al menos, un motor eléctrico de propulsión del buque.
Los motores eléctricos pueden operar como generadores eléctricos cuando realicen el empuje de cargas de trabajo, y transformar, en su mayor parte, la energía almacenada en calor. Dicha energía eléctrica se puede desviar de los ejes de hélice con pérdidas reducidas. Por lo tanto, resultaría concebible, por ejemplo, el accionamiento de un volante de inercia con dicha energía, para almacenar temporalmente la energía. Sin embargo, un sistema de esta clase resulta muy costoso, y requiere además de un espacio considerable.
Por consiguiente, se ha comprobado que resulta ventajoso cuando en la parada inmediata, la energía de frenado es realimentada desde un convertidor y/o inversor de corriente que alimenta el motor eléctrico durante el régimen de marcha, a la red de a bordo. En muchos buques, también en los buques de pasajeros, el funcionamiento de la carga de hotel de a bordo presenta un consumo de potencia absolutamente comparable con la potencia motriz. Por lo tanto, al menos, en un proceso de frenado lento, la energía de frenado podría alimentar completamente a la red de a bordo, y en el caso de una anulación simultánea de los generadores, dicha energía podría ser consumida paulatinamente por dicha red. Sin embargo, en el caso de una parada inmediata, se genera una energía de frenado
muy elevada en un periodo de tiempo muy reducido, lo que implica que los consumidores normales de la red de a bordo no pueden absorberla. Por lo tanto, la red de a bordo por sí sola no puede reemplazar a un volante de inercia.
Por dicho motivo, como se revela en las reivindicaciones independientes 1 y 14, la presente invención prevé que en el caso de una parada inmediata, la energía de frenado realimentada se convierta en calor, al menos parcialmente en, al menos, una resistencia de frenado conectada temporalmente a la red de a bordo. Esta clase de resistencias de frenado se pueden conformar para cada demanda de energía. En el margen de potencia que interesa en este caso, una resistencia de frenado carga completamente uno o una pluralidad de armarios de distribución. Dado que dichas resistencias se conectan según sea necesario a la red de a bordo, en la que la tensión UN se puede admitir de manera aproximadamente constante, donde a un valor de resistencia R de una resistencia de frenado se puede asignar una potencia de entrada nominal PN = UN * I = UN2 / R, que se alimenta de dicha resistencia durante el funcionamiento en la red de a bordo. Mediante la potencia perdida resultante, se calienta la resistencia de frenado. Su temperatura alcanza un límite crítico después de un valor que se puede calcular previamente, en general, después de alrededor de 30 a 40 segundos, de manera que la resistencia se debe desconectar rápidamente a continuación para poder enfriarse nuevamente. Para una parada inmediata, en la que la hélice se detiene después de alrededor de 30 a 60 segundos, dicho periodo de tiempo resulta suficiente. En el caso que se requiera, se pueden proporcionar también dos o más resistencias de frenado y, eventualmente, se puede conectar de manera jerarquizada en el tiempo.
Para reconocer cuándo se requiere una resistencia de frenado, en el caso de una parada inmediata se debe calcular
o detectar la potencia de frenado realimentada, particularmente mediante la multiplicación del valor real de velocidad n por el valor nominal del par de torsión D* generado por un controlador de velocidad. El valor nominal del par de torsión D* resulta más apropiado para este fin que el valor real del par de torsión D, dado que este último se encuentra sometido a fluctuaciones considerables. Para el conocimiento de la potencia activa generada por los generadores antes de iniciar la parada inmediata, se puede determinar fácilmente la demanda de potencia momentánea de la red de a bordo, y se puede comparar con la potencia de frenado a disposición, para identificar hasta que punto la red de a bordo puede absorber la potencia de frenado.
En el caso de una parada inmediata se conecta a la red de a bordo, al menos, una resistencia de frenado, cuando el valor calculado o determinado de la potencia de frenado realimentada resulta cuantitativamente mayor que un valor umbral predeterminado. Dicho valor umbral considera el hecho de que los generadores no se pueden retroceder instantáneamente, sin correr el riesgo de que los grupos diesel pierdan el control. Además, los generadores no se deben descargar completamente, en tanto se encuentren conectados a la red de a bordo,... [Seguir leyendo]
Reivindicaciones:
1. Método para una detención lo más rápida posible de la hélice (2) accionada eléctricamente de un buque (parada inmediata) , caracterizado porque la energía de frenado de, al menos, un motor eléctrico (4) del sistema de propulsión del buque (1) se realimenta como energía eléctrica a una red de a bordo (6) , en donde en la parada inmediata la energía de frenado realimentada se transforma en calor, al menos parcialmente, en, al menos, una resistencia de frenado (48, 49) conectada temporalmente a la red de a bordo (6) .
2. Método de acuerdo con la reivindicación 1, caracterizado porque en la parada inmediata la energía de frenado se realimenta desde un convertidor y/o inversor de corriente (7) que alimenta el motor eléctrico (4) durante el régimen de marcha, a la red de a bordo (6) .
3. Método de acuerdo con una de las reivindicaciones 1 a 2, caracterizado porque en la parada inmediata se calcula o se detecta la potencia de frenado realimentada, particularmente mediante la multiplicación (63) del valor real de velocidad n por el valor nominal del par de torsión D* generado por un controlador de velocidad (10) .
4. Método de acuerdo con la reivindicación 1 ó 3, caracterizado porque en la parada inmediata se conecta a la red de a bordo (6) , al menos, una resistencia de frenado (48, 49) , cuando el valor calculado o determinado de la potencia de frenado realimentada resulta cuantitativamente mayor que un valor umbral predeterminado M1, M2.
5. Método de acuerdo con una de las reivindicaciones 1 a 4, caracterizado porque en la parada inmediata, al menos, una resistencia de frenado (48, 49) conectada a la red de a bordo (6) , se puede desconectar nuevamente de la red de a bordo (6) justo cuando se cumple una de las siguientes condiciones:
a) el valor absoluto de la potencia de frenado realimentada, desciende por debajo de un segundo valor umbral menor (histéresis M1-Hy, M2-Hy) , o
b) desde la conexión de la resistencia de frenado (48, 49) transcurre un intervalo de tiempo predeterminado (tiempo máximo de conexión T) .
6. Método de acuerdo con una de las reivindicaciones precedentes, caracterizado porque en la parada inmediata, la estructura del controlador de velocidad (10) del sistema eléctrico de propulsión por hélice (1) , no se modifica en comparación con la estructura durante el funcionamiento normal.
7. Método de acuerdo con una de las reivindicaciones precedentes, caracterizado porque en la parada inmediata, uno o una pluralidad de parámetros del controlador de velocidad (10) del sistema eléctrico de propulsión por hélice (1) , no se modifican en comparación con los parámetros correspondientes durante el funcionamiento normal.
8. Método de acuerdo con una de las reivindicaciones precedentes, caracterizado porque en la parada inmediata, el valor nominal de velocidad n* de la palanca de control de máquinas (18) se conmuta al valor nominal “0” fijado.
9. Método de acuerdo con una de las reivindicaciones precedentes, caracterizado porque en la parada inmediata, el tiempo de reducción TD se reduce en un generador de rampa (23) del valor de velocidad nominal, particularmente mediante la conmutación (42) de la entrada a otro generador de funciones (46) , para el tiempo de reducción TD.
10. Método de acuerdo con una de las reivindicaciones precedentes, caracterizado porque en la parada inmediata, el tiempo de reducción T se reduce en un generador de rampa (26) del valor nominal del par de torsión, particularmente mediante la conmutación (43) de la entrada a otro generador de funciones (47) , para el tiempo de reducción T.
11. Método de acuerdo con una de las reivindicaciones precedentes, caracterizado porque en la parada inmediata, una curva característica que delimita el momento de frenado, se desplaza hacia valores absolutos mayores admisibles del momento de frenado D, particularmente mediante la conmutación (44) de una entrada del valor límite de una unidad inferior limitadora del valor de corriente (33) , a otro generador de funciones (61) .
12. Método de acuerdo con una de las reivindicaciones precedentes, caracterizado porque se mide (53) la potencia alimentada a la red de a bordo (6) de cada generador activo (9) .
13. Método de acuerdo con la reivindicación 12, caracterizado porque en la parada inmediata, la potencia mínima alimentada por un generador (9) a la red de a bordo (6) , se compara con un valor umbral (P) , y cuando es inferior a dicho valor, se reduce la potencia de frenado particularmente mediante un descenso o bien, una limitación (58) del valor nominal del par de torsión D*.
14. Dispositivo para una detención lo más rápida posible de, al menos, una hélice (2) accionada eléctricamente de un buque (parada inmediata) , caracterizado por una red de a bordo (6) que está diseñada para absorber energía de frenado realimentada por, al menos, un motor eléctrico (4) del sistema de propulsión del buque (1) y, al menos, una resistencia de frenado (48, 49) que se puede conectar a la red de a bordo (6) mediante un interruptor (50, 51) , relé o similar, para la conversión parcial a calor, de la energía de frenado alimentada a la red de a bordo (6) en el caso de una parada inmediata.
15. Dispositivo de acuerdo con la reivindicación 15, caracterizado por un convertidor y/o inversor de corriente (7) que alimenta el motor eléctrico (4) durante el régimen de marcha, que está diseñado para alimentar la energía de frenado realimentada por, al menos, un motor eléctrico (4) del sistema de propulsión del buque (1) , a la red de a bordo (6) , en el caso de una parada inmediata.
16. Dispositivo de acuerdo con una de las reivindicaciones 14 a 15, caracterizado por, al menos, una unidad (63) para calcular o determinar la potencia de frenado realimentada en el caso de una parada inmediata, particularmente un multiplicador, por una parte, para el valor real de velocidad n y, por otra parte, para el valor nominal del par de torsión D* generado por un controlador de velocidad (10) .
17. Dispositivo de acuerdo con la reivindicación 16, caracterizado por un comparador, un interruptor de valor límite (64, 65) o similar, para la comparación del valor calculado o determinado de la potencia de frenado realimentada, con un valor umbral predeterminado M1, M2, cuya salida (67, 68) se acopla con, al menos, un interruptor (50, 51) para la conexión de, al menos, una resistencia de frenado (48, 49) a la red de a bordo (6) .
18. Dispositivo de acuerdo con una de las reivindicaciones 14, 16 ó 17, caracterizado por, al menos, una unidad de histéresis (64, 65) para abrir nuevamente el interruptor (50, 51) que conecta una resistencia de frenado (48, 49) con la red de a bordo (6) , cuando se excede un segundo valor umbral cuantitativamente menor (histéresis M1-Hy, M2-Hy)
o no se alcanza en términos cuantitativos.
19. Dispositivo de acuerdo con una de las reivindicaciones 14 ó 16 a 18, caracterizado por, al menos, una unidad de reloj (69, 70) para abrir nuevamente el interruptor (50, 51) que conecta una resistencia de frenado (48, 49) con la red de a bordo (6) , cuando desde la conexión de la resistencia de frenado (48, 49) transcurre un intervalo de tiempo T predeterminado.
20. Dispositivo de acuerdo con una de las reivindicaciones 14 a 19, caracterizado por uno o una pluralidad de conmutadores (41-44) , relés conmutadores o similares, para modificar uno o una pluralidad de parámetros del controlador de velocidad (10) del sistema eléctrico de propulsión por hélice (1) , en el caso de una parada inmediata, en comparación con los parámetros correspondientes durante el funcionamiento normal.
21. Dispositivo de acuerdo con la reivindicación 20, caracterizado por un conmutador (41) , un contacto de relé conmutador o similar, que en el caso de una parada inmediata conmuta el valor nominal de velocidad n* de la palanca de control de máquinas (18) al valor nominal “0” fijado.
22. Dispositivo de acuerdo con una de las reivindicaciones 20 ó 21, caracterizado por un conmutador (42) , un contacto de relé conmutador o similar, que en el caso de una parada inmediata, conmuta el tiempo de reducción TD en un generador de rampa (23) del valor de velocidad nominal, a un valor reducido que es generado preferentemente por un generador de funciones (46) por separado.
23. Dispositivo de acuerdo con una de las reivindicaciones 20 a 22, caracterizado por un conmutador (43) , un contacto de relé conmutador o similar, que en el caso de una parada inmediata, conmuta el tiempo de reducción (T) en un generador de rampa (26) del valor nominal del par de torsión, a un valor reducido que es generado preferentemente por un generador de funciones (47) por separado.
24. Dispositivo de acuerdo con una de las reivindicaciones 20 a 23, caracterizado por un conmutador (44) , un contacto de relé conmutador o similar, que en el caso de una parada inmediata, conmuta desde un generador de curva característica (40) que limita el momento de frenado durante el funcionamiento normal, a un generador de curva característica (61) que limita el momento de frenado en el caso de una parada inmediata, con valores absolutos mayores admisibles del momento de frenado.
25. Dispositivo de acuerdo con una de las reivindicaciones 14 a 24, caracterizado por uno o una pluralidad de sensores (53) , transductores o similares, para medir la potencia alimentada a la red de a bordo (6) de cada generador activo (9) .
26. Dispositivo de acuerdo con la reivindicación 25, caracterizado por un comparador, un integrador (57) o similar, para comparar en el caso de una parada inmediata, la potencia mínima Pmin alimentada por un generador (9) a la red de a bordo (6) , con un valor nominal P predeterminado.
27. Dispositivo de acuerdo con la reivindicación 26, caracterizado porque la señal de salida (58) del comparador, del integrador (57) o similar, se transmite a una unidad (33) que limita el valor nominal para el momento de frenado D*, con el fin de reducir el valor nominal del momento de frenado D* cuando la potencia mínima Pmin alimentada por un generador (9) a la red de a bordo (6) resulta menor que un valor umbral P predeterminado.
Patentes similares o relacionadas:
Sistema de propulsión de buques con varios ejes de propulsión eléctrica, del 4 de Marzo de 2020, de SIEMENS AKTIENGESELLSCHAFT: Sistema de propulsión de buques con al menos un primer y un segundo ejes de propulsión eléctrica para accionar en cada caso una unidad de propulsión […]
Sistema de gestión de energía eléctrica de un buque, del 4 de Marzo de 2020, de SIEMENS AKTIENGESELLSCHAFT: Un sistema de gestión de energía eléctrica de un buque para controlar el suministro de potencia a y desde un sistema de propulsión de un buque, comprendiendo el sistema de […]
Vehículo acuático motorizado eléctrico con refrigeración mediante agua circundante, del 8 de Enero de 2020, de CAYAGO TEC GmbH: Vehículo acuático motorizado con un casco de vehículo sobre el que se apoya o se pone en pie un usuario al menos en parte, con un canal de flujo que discurre […]
Vehículo acuático con accionamiento por esfuerzo muscular, del 16 de Octubre de 2019, de Bisinger, Lothar: Vehículo acuático con accionamiento por pedales mediante esfuerzo muscular de una persona, en el que como unidad de accionamiento se usa una bicicleta […]
Sistema de refrigeración redundante con dos circuitos de refrigeración en un anillo de refrigeración de estator para un motor de accionamiento eléctrico, del 16 de Octubre de 2019, de SIEMENS AKTIENGESELLSCHAFT: Dispositivo de refrigeración redundante para un motor de accionamiento eléctrico de submarino, con un primer circuito de refrigeración y un segundo circuito […]
 Accionamiento electromecánico para un dispositivo flotable, del 28 de Agosto de 2019, de W & D Innovations B.V: Accionamiento electromecánico para un dispositivo flotable, que se puede utilizar para el deporte de la pesca, que comprende una conexión […]
Accionamiento electromecánico para un dispositivo flotable, del 28 de Agosto de 2019, de W & D Innovations B.V: Accionamiento electromecánico para un dispositivo flotable, que se puede utilizar para el deporte de la pesca, que comprende una conexión […]
Vehículo acuático deslizante, del 7 de Agosto de 2019, de CAYAGO TEC GmbH: Vehículo acuático deslizante con un casco , al menos un asiento y dos brazos dispuestos a los lados del casco y unidos directa o indirectamente […]
Propulsor para un barco, del 10 de Julio de 2019, de Baumberger, Charles: Propulsor para un barco que comprende: un motor ; un brazo de unión ; una porción de carenado destinada a ser montada […]