MÉTODO Y SISTEMA DE CONTROL DE VELOCIDAD DE UN VEHÍCULO FERROVIARIO.
Un método de control de la velocidad de un vehículo ferroviario (2);
donde dicho método comprende los pasos siguientes de: medir el valor real de la altura de al menos una rueda (3) del vehículo (2) desde el plano de rodadura de un raíl correspondiente (4) sobre el cual discurre la rueda (3); y controlar la velocidad del vehículo (2) en función del valor real de la altura; donde el método de control está caracterizado porque comprende además los pasos de: determinar una gama óptima del valor de la altura con un valor límite inferior y uno superior; y controlar la velocidad del vehículo (2) con el fin de mantener el valor real de la altura dentro de la gama óptima
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IT2008/000390.
Solicitante: LABOR S.R.L.
STAZZI, ROLANDO.
Nacionalidad solicitante: Italia.
Dirección: VIA DELLA SCROFA 117 00186 ROMA (RM) ITALIA.
Inventor/es: STAZZI,Rolando , PICANO,Alfredo.
Fecha de Publicación: .
Fecha Solicitud PCT: 12 de Junio de 2008.
Clasificación Internacional de Patentes:
- B61L25/02A
- B61L25/02D
Clasificación PCT:
- B61L25/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B61 FERROCARRILES. › B61L CONTROL DE TRAFICO FERROVIARIO; SEGURIDAD DEL TRAFICO FERROVIARIO (frenos o equipos auxiliares B61H, B61K; estructura de sistemas de agujas E01B). › B61L 25/00 Registro o indicación de la posición o de la identidad de vehículos o de trenes o de la posición de aparatos de la vía. › Indicación o registro de la posición o de la identidad de vehículos o de trenes.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
CAMPO TÉCNICO
La presente invención está relacionada con un método y un sistema de control de la velocidad de un vehículo ferroviario.
La presente invención encuentra una ventajosa aplicación en el control de la velocidad de un tren, al cual se re-5 fiere específicamente la descripción siguiente, sin perder su carácter general.
TÉCNICA ANTERIOR
Para el control de trenes, se utilizan ampliamente sistemas automáticos de control, con el fin de ayudar (control semiautomático) o sustituir completamente (controles automáticos) a los conductores de trenes. Un ejemplo de tales sistemas automáticos son los dispositivos electrónicos de anti-descarrilamiento, que intervienen automáticamente con 10 un frenado de emergencia del tren, cuando se detecta un potencial descarrilamiento.
Para permitir la conducción en condiciones normales de un vagón ferroviario, la pestaña en el extremo de cada rueda no debe ponerse en contacto con el perfil lateral del raíl. Cuando empiezan a suceder condiciones no naturales relativas a la dinámica del vehículo, como por ejemplo una alta velocidad en una curva, la pestaña de la rueda puede ponerse en contacto con el perfil, y la rueda puede elevarse hasta una condición límite, en la cual la pestaña no es ya 15 capaz de tener un alto contacto con el perfil del raíl; en tales condiciones, el biselado de la rueda opuesta hace que el eje se salga inmediatamente de su asiento, dando comienzo al descarrilamiento.
Un conocido dispositivo electrónico anti-descarrilamiento comprende al menos un dispositivo de medición mon-tado sobre un buje de una rueda del tren ferroviario, con el fin de medir instantáneamente el valor real de la altura de la rueda desde el plano de rodadura del correspondiente raíl sobre el cual discurre la rueda; si el valor real de la altura es 20 mayor que un valor de seguridad predeterminado, (es decir, si la rueda pierde su contacto con el plano de rodadura), se activa automáticamente un frenado de emergencia para el tren ferroviario.
Los dispositivos electrónicos anti-descarrilamiento conocidos, miden la altura de la rueda del vehículo ferroviario desde el plano de rodadura del raíl, con el único objetivo de identificar cuando se verifican o prevén condiciones presentes de descarrilamiento del tren. En cualquier caso, tales dispositivos electrónicos anti-descarrilamiento no son 25 útiles en la conducción normal de un tren, donde el tren ferroviario está lejos de las condiciones de descarrilamiento.
En la conducción semiautomática o automática de un tren ferroviario, surge la necesidad de un sistema de con-trol que permita controlar la velocidad del tren ferroviario, particularmente en una curva, con el fin de combinar de una manera óptima dos necesidades en conflicto: garantizar la mayor seguridad de la conducción (cuya necesidad llevaría a minimizar la velocidad) y alcanzar los mayores rendimientos posibles (cuya necesidad llevaría a maximizar la velocidad). 30 En otras palabras, es extremadamente complicado obtener, en condiciones de seguridad, los mayores rendimientos posibles, particularmente cuando los parámetros que influencian los rendimientos son variables (por ejemplo, la masa efectiva del tren ferroviario) y por tanto no es posible establecer por adelantado lo que podría ser las mayores condiciones de seguridad posibles. Por esta razón, en las condiciones semiautomáticas o automáticas reales de un vehículo ferroviario, los límites de rendimiento se establecen prudencialmente (es decir, con el fin de garantizar la 35 seguridad en cualquier situación posible), que en ningún caso penalice los rendimientos, siendo siempre más bajos (y además mucho) que los rendimientos máximos que podrían ser posibles, pero permaneciendo en cualquier caso en condiciones de seguridad.
El documento US 3.363.446 divulga un sistema de control con la calibración de los diámetros de las ruedas.
DESCRIPCIÓN DE LA INVENCIÓN 40
El objetivo de la presente invención es proporcionar un método y un sistema de control de la velocidad de un vehículo ferroviario, estando dicho método y sistema libres de los inconvenientes antes mencionados, que sean fáciles y económicos de realizar y, en particular, que permitan la obtención, en condiciones de seguridad, los máximos rendimientos posibles.
De acuerdo con la invención, se proporciona un método y un sistema de control de la velocidad de un vehículo 45 ferroviario, como se reivindica en las reivindicaciones anexas.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
Se describirá ahora la presente invención con referencia a los dibujos anexos, que ilustran un ejemplo de aplica-ción no limitativa, en los que:
La figura 1 es una vista esquemática de un tren equipado con un sistema de control de su velocidad, de acuerdo con 50 la presente invención;
La figura 2 es una vista esquemática de los sistemas de control;
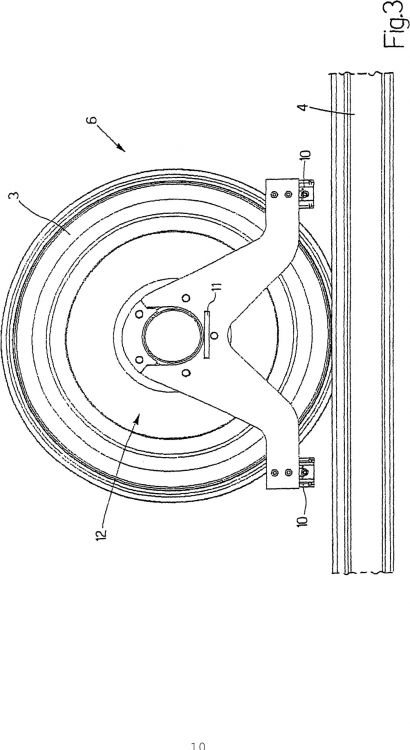
La figura 3 es una vista ampliada de una rueda del tren de la figura 1, de acuerdo con un dispositivo de medición del sistema de control;
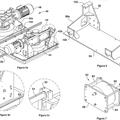
La figura 4 es una vista en perspectiva de una pestaña de soporte del dispositivo de medición de la figura 3; y
Las figuras 5 - 8 son vistas esquemáticas de cuatro posibles condiciones de contacto entre la rueda del tren de la 5 figura 1 y un raíl.
MODOS DE REALIZACIÓN PREFERIDOS DE LA INVENCIÓN
En las figuras anexas, la referencia 1 es globalmente un sistema de control de la velocidad de un vehículo ferro-viario 2. El vehículo 2 tiene una pluralidad de ruedas 3, que ruedan sobre dos raíles 4 (de los cuales se ilustra uno en la figura 1). 10
El sistema 1 de control comprende una unidad 5 de control, que está conectada con el sistema de potencia (no ilustrado) del vehículo 2, con el fin de controlar la velocidad del vehículo 2, y un dispositivo 6 de medición, que está conectado a la unidad 5 de control, y puede medir el valor real de la altura de al menos una rueda del vehículo 2, desde el plano de rodadura de un correspondiente raíl 4 sobre el cual discurre la rueda 3.
Durante la conducción del vehículo 2, particularmente en una curva, la unidad 5 controla la velocidad del vehículo 15 2 en función del valor real de la altura de al menos una rueda 3 sobre el plano de rodadura. En particular, la unidad 5 de control tiene una memoria 7 (ilustrada en la figura 2) en la cual se almacena una gama óptima del valor de la altura, con un valor límite inferior y uno superior; la unidad 5 controla la velocidad del vehículo 2, con el fin el valor real de la altura dentro de la gama óptima. La unidad 5 de control controla preferiblemente, como realimentación, la velocidad del vehículo 2, con el fin de mantener el valor real de la altura dentro de la gama óptima y utilizando como variable de 20 realimentación el valor real de la altura.
En otras palabras, la unidad 5 de control aumenta la velocidad del vehículo 2 si el valor real de la altura es menor que el valor límite inferior de la gama óptima, y reduce la velocidad del vehículo 2 si el valor real de la altura es mayor que el valor límite superior de la gama óptima. Además, la unidad 5 de control proporciona un frenado de emergencia del vehículo 2 si el valor real de la altura es mayor que el valor límite superior de la gama óptima en una cantidad mayor 25 que un umbral de seguridad predeterminado (es decir, si el vehículo 2 se aproxima peligrosamente a una condición de potencial descarrilamiento).
En la figura 2, se ilustra un diagrama básico del sistema 1 de control, subrayando cómo la unidad 5 controla co-mo realimentación la velocidad del vehículo 2, utilizando como variable de realimentación el valor real de la altura. En particular, la unidad 5 de control comprende, además de la memoria 7 en la cual está almacenada la gama óptima del 30 valor de la altura, un bloque 8 que compara el valor real de la altura dada por el dispositivo 6 de medición, con la gama óptima dada por la memoria 7, para determinar un valor error, y un bloque 9 de regulación, que recibe un valor error desde el bloque 8 de comparación, y consecuentemente dirige el vehículo 2. Típicamente, el bloque 9 de regulación comprende un regulador PID (Proporcional, Integral, Derivado) de clase conocida.
De acuerdo con la figura 3, el dispositivo 6 de medición comprende una pareja de interruptores 10 de proximidad, 35 cada uno de ellos montado en una posición fija sobre...
Reivindicaciones:
1. Un método de control de la velocidad de un vehículo ferroviario (2); donde dicho método comprende los pasos siguientes de:
medir el valor real de la altura de al menos una rueda (3) del vehículo (2) desde el plano de rodadura de un raíl correspondiente (4) sobre el cual discurre la rueda (3); y 5
controlar la velocidad del vehículo (2) en función del valor real de la altura;
donde el método de control está caracterizado porque comprende además los pasos de:
determinar una gama óptima del valor de la altura con un valor límite inferior y uno superior; y
controlar la velocidad del vehículo (2) con el fin de mantener el valor real de la altura dentro de la gama óptima.
2. Método de control como se reivindica en la reivindicación 1, 10
donde se aumenta la velocidad del vehículo (2) si el valor real de la altura es menor que un valor límite inferior de la gama óptima, y se reduce la velocidad del vehículo (2) si el valor real de la altura es mayor que el valor límite superior de la gama óptima.
3. Método de control como se reivindica en la reivindicación 1 o 2, que comprende el paso adicional de un frenado de emergencia del vehículo (2), si el valor real es mayor que el valor límite superior de la gama óptima, en una cantidad 15 mayor que un umbral de seguridad predeterminado.
4. Método como se reivindica en la reivindicación 1, 2 o 3, en el que el paso de medir el valor real de la altura compren-de los siguientes pasos adicionales de:
medir directamente el valor de la altura por medio de un interruptor (10) de proximidad, montado en una posición fija;
medir el valor de la aceleración transversal que actúa sobre la rueda (3) por medio de un acelerómetro (11) montado en 20 una posición fija; y
evaluar el valor real de la altura, en función del valor de la altura medida por el interruptor (10) de proximidad, y como una función del valor de la aceleración transversal medida por el acelerómetro (11).
5. Método como se reivindica en la reivindicación 4, que comprende los pasos adicionales de:
integrar dos veces en el tiempo el valor de la aceleración transversal medida por el acelerómetro (11), con el fin de 25 obtener un valor correspondiente de la posición transversal de la rueda (3) con respecto al raíl (4);
convertir el valor de la posición transversal en un valor correspondiente de una posición vertical, por medio de una ley de conversión biunívoca; y
comparar el valor de la posición vertical con el valor de la altura medida por el interruptor (10) de proximidad, con el fin de confirmar o corregir el valor de la altura medida por el mismo interruptor (10) de proximidad. 30
6. Método como se reivindica en la reivindicación 5, en el que la ley de conversión biunívoca es una función del perfil biselado de la rueda (3), y se determina en un paso inicial de diseño y calibración.
7. Método según las reivindicaciones 4, 5 o 6, que comprende el paso de determinar un momento en el cual la pestaña (16) de la rueda (3) se pone en contacto con el perfil lateral del raíl (4), cuando el valor de la aceleración transversal, medido por el acelerómetro (11), tiene una discontinuidad. 35
8. Método como se reivindica en una de las reivindicaciones 1 a 7, en el que valor del límite superior de la altura se corresponde con una condición en la cual la rueda (3) tiene dos puntos de contacto diferentes con el raíl (4), con respecto a la superficie biselada y a la pestaña (16) de la rueda.
9. Sistema (1) de control de la velocidad de un vehículo ferroviario (2); donde el sistema (1) de control comprende:
un dispositivo (6) para medir el valor real de la altura de al menos una rueda (3) del vehículo (2) desde el plano de 40 rodadura de un raíl correspondiente (4) sobre el cual discurre la rueda (3); y
una unidad (5) de control conectada al dispositivo (6) de medición, con el fin de controlar la velocidad del vehículo (2) en función del valor real de la altura;
donde el sistema (1) de control está caracterizado porque la unidad (5) de control tiene una memoria (7) en la cual se
almacena una gama óptima del valor de la altura, con un valor límite inferior y uno superior; y porque dicha unidad (5) controla la velocidad del vehículo (2), con el fin de mantener el valor real de la altura en la gama óptima.
10. Sistema (1) de control como se reivindica en la reivindicación 9, en el que la unidad (5) de control aumenta la velocidad del vehículo (2) si el valor real de la altura es menor que el valor límite inferior de la gama óptima, y reduce la velocidad del vehículo (2) si el valor real de la altura es mayor que el valor límite superior de la gama óptima. 5
11. Sistema (1) de control como se reivindica en la reivindicación 9 o 10, en el que la unidad (5) de control realiza un frenado de emergencia del vehículo (2) si el valor real de la altura es mayor que el valor límite superior de la gama óptima, en una cantidad mayor que un umbral de seguridad determinado.
12. Sistema como se reivindica en las reivindicaciones 9, 10 u 11, en el que el dispositivo (6) de medición tiene un interruptor (10) de proximidad montado en una posición fija, con el fin de medir directamente el valor de la altura, y un 10 acelerómetro (11) montado en una posición fija, con el fin de medir un valor de la aceleración transversal que actúa sobre la rueda (3);donde el dispositivo (6) de medición estima el valor real de la altura en función del valor de la altura medida por el interruptor (10) de proximidad, y como una función del valor de la aceleración transversal medido por el acelerómetro (11).
13. Sistema (1) de control como se reivindica en una de las reivindicaciones 9 a 12, en el que el dispositivo (6) de 15 medición tiene una pareja de interruptores (10) de proximidad recíprocamente redundantes y están montados a una cierta distancia a lo largo de la dirección de avance del vehículo (2).
14. Sistema como se reivindica en la reivindicación 13, en el que el dispositivo (6) de medición tiene una pestaña (12) de soporte con un cuerpo central (13) que tiene forma de “V” invertida, con dos segmentos centrales inclinados (14) y que está fijado a un buje de la rueda (3), y dos segmentos laterales (15), cada uno de los cuales es horizontal comenzando 20 desde un segmento central (14), y soporta un interruptor (10) de proximidad.
Patentes similares o relacionadas:
 SISTEMA PARA LA DETECCION DE LA POSICION DE FERROCARRILES, del 5 de Julio de 2010, de BOMBARDIER TRANSPORTATION GMBH: Sistema para la detección de la posición de ferrocarriles con un dispositivo de medición de velocidad a bordo del vehículo, que induce corriente parásitas […]
SISTEMA PARA LA DETECCION DE LA POSICION DE FERROCARRILES, del 5 de Julio de 2010, de BOMBARDIER TRANSPORTATION GMBH: Sistema para la detección de la posición de ferrocarriles con un dispositivo de medición de velocidad a bordo del vehículo, que induce corriente parásitas […]
 PROCEDIMIENTO Y SISTEMA PARA LA ACTIVACION DE UN EJE DE GIRO LIBRE PARA CONSERVAR LA FUERZA DE FRENADO, del 30 de Abril de 2010, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para la activación de un eje de giro libre de un tren (Z) que presenta varios ejes, para conservar la fuerza de frenado,
en el que está activado al […]
PROCEDIMIENTO Y SISTEMA PARA LA ACTIVACION DE UN EJE DE GIRO LIBRE PARA CONSERVAR LA FUERZA DE FRENADO, del 30 de Abril de 2010, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para la activación de un eje de giro libre de un tren (Z) que presenta varios ejes, para conservar la fuerza de frenado,
en el que está activado al […]
Sistema y procedimiento para el acoplamiento / desacoplamiento de vehículos guiados en movimiento durante el funcionamiento, del 1 de Julio de 2020, de Siemens Rail Automation S.A.U: Procedimiento para el acoplamiento / desacoplamiento de una unidad de vehículo guiado A2 a/de una unidad de vehículo guiado A1, mientras que dichas unidades de vehículos guiados […]
Procedimiento y disposición para la localización de un vehículo ferroviario en circulación en un sistema de control de tren y de protección de tren CBTC (control de trenes basado en comunicaciones), del 27 de Mayo de 2020, de Siemens Mobility GmbH: Procedimiento para la localización de un vehículo ferroviario que circula en un sistema de control y protección de trenes CBTC (Control de […]
Procedimiento para operar un dispositivo de localización, así como dispositivo de localización, del 13 de Mayo de 2020, de Siemens Mobility GmbH: Procedimiento para operar un dispositivo de localización que, para localizar un vehículo guiado por carriles sobre una sección de línea , […]
Procedimiento y sistema de comunicación para el intercambio de información entre vehículos guiados, del 5 de Febrero de 2020, de Siemens Rail Automation S.A.U: Sistema RFID configurado para estar instalado a bordo de un primer vehículo guiado (A) con el fin de permitir a este último intercambiar información automáticamente con […]
 Disposiciones de estación de accionamiento, del 29 de Enero de 2020, de Rail-Veyor Technologies Global Inc: Un conjunto de accionamiento para un sistema de transporte ferroviario para transportar materiales a granel a través de una pluralidad de vagones adaptados para formar […]
Disposiciones de estación de accionamiento, del 29 de Enero de 2020, de Rail-Veyor Technologies Global Inc: Un conjunto de accionamiento para un sistema de transporte ferroviario para transportar materiales a granel a través de una pluralidad de vagones adaptados para formar […]
Sistema y método para localizar y registrar automáticamente una baliza, del 8 de Enero de 2020, de Siemens Rail Automation S.A.U: Sistema autónomo , para detectar, localizar y registrar automáticamente al menos una baliza instalada en un punto a lo largo de una vía […]