PROCEDIMIENTO Y DISPOSITIVO PARA DIRIGIR UN VEHICULO SIN CONTACTO CON LA VIA.
Un vehículo (3) que no entra en contacto con un raíl que comprende:
ruedas (6);
un cuerpo principal (4) del vehículo soportado por dichas ruedas (6); y
un sistema (10, 20) de control de la dirección,
en el que dicho sistema (10, 20) de control de la dirección comprende:
una sección (10) de control configurada para controlar una dirección de dichas ruedas (6) de forma no mecánica; y
una sección (20) de accionamiento configurada para accionar de forma mecánica la dirección de dichas ruedas (6),
comprendiendo dicha sección (10) de control:
un primer detector (11) configurado para detectar datos de coordenadas unidimensionales de una ruta objetivo;
una sección (11) de mantenimiento del ángulo de la dirección configurada para mantener un ángulo objetivo de dirección correspondiente a dichos datos de coordenadas unidimensionales;
un segundo detector (33) configurado para detectar una desviación actual entre dicha ruta objetivo y una posición actual de dicho cuerpo principal (4) del vehículo; y
una sección (31) de cálculo del ángulo de control de la dirección configurada para generar un ángulo de control de la dirección correspondiente a dicha desviación actual (?R) y dicho ángulo objetivo de dirección,
dicha sección (20) de accionamiento gira una orientación de dichas ruedas (6) en base a dicho ángulo de control de la dirección,
caracterizada porque dicha sección de control comprende además:
un controlador (38) de corrección del ángulo de la dirección configurado para determinar un ángulo futuro de dirección correspondiente a una posición futura en dicha ruta objetivo, y para generar un ángulo de corrección de la dirección correspondiente a dicha desviación actual, dicho ángulo objetivo de dirección y dicho ángulo futuro de dirección, y
dicha sección (31) de cálculo del ángulo de control de la dirección genera dicho ángulo de control de la dirección correspondiente a dicha desviación actual, dicho ángulo objetivo de dirección y dicho ángulo de corrección de la dirección
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/JP2003/013953.
Solicitante: MITSUBISHI HEAVY INDUSTRIES, LTD..
Nacionalidad solicitante: Japón.
Dirección: 16-5, KONAN 2-CHOME, MINATO-KU,TOKYO 108-8215.
Inventor/es: YAMASHITA, HIROSHI, KONO,HIROYUKI, YAMAGUCHI,MASAHIRO, MASUKAWA,MASAHISA, MORICHIKA,SHUNJI, MOCHIDOME,HIROYUKI, FUKUDA,KOKI.
Fecha de Publicación: .
Fecha Concesión Europea: 3 de Marzo de 2010.
Clasificación Internacional de Patentes:
- B62D1/26B
- B62D1/28 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 1/00 Mando de la dirección, es decir, medios para producir un cambio en la dirección del vehículo. › no mecánicos.
- G05D1/02E6V
Clasificación PCT:
- B62D1/28 B62D 1/00 […] › no mecánicos.
Clasificación antigua:
- B61B13/00 B […] › B61 FERROCARRILES. › B61B SISTEMAS FERROVIARIOS; EQUIPAMIENTOS A ESTE EFECTO NO PREVISTOS EN OTRO LUGAR (ascensores o montacargas, elevadores, escaleras o aceras mecánicas B66B). › Otros sistemas ferroviarios.
- B62D6/00 B62D […] › Dispositivos para el control automático de la dirección en función de las condiciones de conducción, que son detectadas y para las cuales es aplicada una reacción (medios para producir un cambio en la dirección del vehículo B62D 1/00; válvulas de control de la dirección B62D 5/06; combinados con medios para inclinar el vehículo o las ruedas en los giros B62D 9/00).
- G05D1/02 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
Fragmento de la descripción:
Procedimiento y dispositivo para dirigir un vehículo sin contacto con la vía.
Campo técnico
La presente invención versa acerca de un aparato de dirección para un vehículo que no tiene contacto con un raíl y acerca de un procedimiento de dirección para el mismo, y más en particular acerca de un aparato de dirección para un vehículo que no tiene contacto con un raíl, en el que se automatiza una operación de dirección, y un procedimiento de dirección para el mismo.
Técnica antecedente
En la actualidad se promueve la adopción de un nuevo sistema de transporte en áreas estrechas como un aeropuerto y un recinto de exposición. A diferencia del tren bala Shinkansen, como tecnología de transporte de área extensa, no se requiere que el nuevo sistema de transporte efectúe un transporte a alta velocidad y lleve a cabo un transporte de masas, pero se requiere que no necesite una instalación de raíles a gran escala. En la solicitud expuesta al público de patente japonesa (JP-P2002-310651A) se da a conocer un vehículo del tipo dotado de neumáticos de caucho, como un automóvil y un autobús, como un vehículo que no necesita instalaciones de raíles. El vehículo de tipo neumático de caucho tiene un gran grado de libertad en una dirección de circulación, y no es adecuado como un vehículo en un aeropuerto. Como se da a conocer en la solicitud expuesta al público de patente japonesa (JP-P2002-19603A), se requiere del nuevo sistema de transporte que defina una ruta de circulación definida fácilmente. Se conocen diversas técnicas para una tecnología de un carril sencillo de guía. Dicho carril de guía requiere un cierto grado de resistencia para una operación segura. La obtención de la resistencia dificulta la reducción deseada del coste de las instalaciones.
Para abolir un carril mecánico de guía, se propone disponer una cinta lateral de información en la superficie de la carretera que tiene datos de coordenadas unidimensionales en una ruta definida. Dicha cinta lateral de información en la superficie de la carretera tiene escritos datos de operación. Los datos de operación incluyen datos de coordenadas unidimensionales en la ruta de circulación. En este caso, se necesita una tabla para indicar una relación correspondiente entre los datos de coordenadas unidimensionales y datos de control de la operación como un ángulo de dirección, una velocidad, y una aceleración. Si el valor de la tabla está fijado, se vuelve difícil llevar a cabo un control correspondiente a una situación de circulación que cambia de momento en momento. Por lo tanto, convencionalmente, se provoca un cambio rápido de velocidad resultante a partir de un cambio rápido en un ángulo de dirección (por ejemplo, aceleración en una dirección perpendicular a una dirección del raíl), lo que lleva, de ese modo, al empeoramiento del grado de comodidad.
Se requiere el establecimiento de la tecnología de un sistema de dirección que esté libre de una porción mecánica de dirección que contacte de forma mecánica con un carril de guía, y siga de forma precisa una ruta definida de circulación. Es importante no abolir un raíl de seguridad para garantizar la seguridad; sin embargo, se desea la simplificación del raíl de seguridad. También se requiere comodidad durante una operación automatizada. Los documentos US 6.185.492 B1 y EP 11 70 195 describen un "control de vehículos que siguen un carril".
Revelación de la invención
Un objetivo de la presente invención es proporcionar un aparato de dirección para un vehículo que no tiene contacto con el raíl y un procedimiento de dirección para el mismo, en el que se establece una tecnología de dirección automatizada del vehículo que no tiene una porción mecánica de dirección que entre en contacto de forma mecánica con un carril de guía.
Otro objetivo de la presente invención es proporcionar un aparato de dirección para un vehículo que no tiene contacto con el raíl y un procedimiento de dirección para el mismo, en el que se puede llevar a cabo una operación suave al tomar una variable futura (predicha) en un sistema de control.
Aún otro objetivo de la presente invención es proporcionar un aparato de dirección para un vehículo que no tiene contacto con el raíl y un procedimiento de dirección para el mismo, en el que se puede llevar a cabo un control óptimo mediante el aprendizaje.
Además, es un objetivo de la presente invención proporcionar un aparato para la invención de raíles para proporcionar un aparato de dirección para un vehículo que no tiene contacto con el raíl y un procedimiento de dirección para el mismo, en el cual se puede obtener una mejora en el rendimiento del control automático al igual que una mejora en un grado de comodidad. Conforme a un aspecto de la presente invención, se proporciona un vehículo que no tiene contacto con un raíl conforme a la reivindicación 1. Conforme a un aspecto adicional de la presente invención, se proporciona un procedimiento de dirección de un vehículo que no tiene contacto con un raíl conforme a la reivindicación 28.
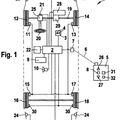
Un vehículo que no tiene contacto con un raíl incluye ruedas, un cuerpo principal del vehículo soportado por las ruedas, y un sistema de control de la dirección. El sistema de control de la dirección incluye una sección de control configurada para controlar una dirección de las ruedas de forma no mecánica, y una sección de accionamiento configurada para accionar de forma mecánica la dirección de las ruedas. La sección de control incluye un primer detector configurado para detectar datos de coordenadas unidimensionales de una ruta objetivo, una sección de mantenimiento de un ángulo de dirección para mantener un ángulo objetivo de dirección correspondiente a los datos de coordenadas unidimensionales, un segundo detector configurado para detectar una desviación actual entre la ruta objetivo y una posición actual del cuerpo principal del vehículo y una sección de cálculo del ángulo de control de la dirección configurada para generar un ángulo de control de la dirección correspondiente a la desviación actual y al ángulo objetivo de dirección. La desviación actual puede estar definida como una distancia hasta la posición actual del cuerpo principal del vehículo en una dirección ortogonal a la ruta objetivo, y la sección de accionamiento hace girar una orientación de las ruedas en base al ángulo de control de la dirección.
Aquí, la ruta objetivo está fijada preferentemente en una superficie de la carretera, y el segundo detector detecta la desviación de la posición de una forma sin contacto.
Además, el vehículo que no tiene contacto con un raíl puede incluir también una sección de cálculo proporcionada en el cuerpo principal del vehículo. La sección de cálculo calcula y guarda datos de coordenadas bidimensionales al integrar datos de velocidad del cuerpo principal del vehículo.
Además, la ruta objetivo está fijada en una superficie de la carretera y puede incluir una sección de salida configurada para dar salida a los datos de coordenada unidimensional, y se transmiten los datos de coordenadas unidimensionales al primer detector de forma inalámbrica desde la porción de salida. En este caso, el ángulo objetivo de dirección está escrito preferentemente en una ruta de circulación.
Además, la sección de control puede incluir también un tercer detector configurado para detectar una velocidad del cuerpo principal del vehículo, y la sección de control del ángulo de dirección genera datos de control correspondientes a la desviación de la posición, el ángulo deseado de dirección y la velocidad.
Además, la sección de control puede incluir también una sección de cálculo de la optimización configurada para optimizar el ángulo de control de la dirección hasta una solución óptima, y la solución óptima se determina para minimizar la vibración resultante de la dirección del vehículo.
Además, la sección de control puede incluir también un controlador de corrección del ángulo de la dirección configurado para determinar un ángulo futuro de dirección correspondiente a una posición futura en la ruta objetivo, y para generar un ángulo de corrección de la dirección correspondiente a la desviación actual, al ángulo objetivo de dirección y al ángulo futuro de dirección. La sección de cálculo del ángulo de control de la dirección genera el ángulo de control de la dirección correspondiente a la desviación actual, al ángulo objetivo de la dirección, y al ángulo de corrección de la dirección. En este caso, la...
Reivindicaciones:
1. Un vehículo (3) que no entra en contacto con un raíl que comprende:
2. El vehículo que no entra en contacto con un raíl conforme a la reivindicación 1, en el que dicha desviación actual (?R) está definida como una distancia hasta dicha posición actual de dicho cuerpo principal (4) del vehículo en una dirección ortogonal a dicha ruta objetivo.
3. El vehículo que no entra en contacto con un raíl conforme a la reivindicación 1, en el que dicha ruta objetivo está fijada en una superficie de la carretera, y dicho segundo detector (33) detecta dicha desviación de la posición de forma carente de contacto.
4. El vehículo que no entra en contacto con un raíl conforme a la reivindicación 1, que comprende además:
5. El vehículo que no entra en contacto con un raíl conforme a la reivindicación 1, en el que dicha ruta objetivo está fijada en una superficie de la carretera y comprende una sección de salida configurada para dar salida a dichos datos de coordenadas unidimensionales, y
se transmiten dichos datos de coordenadas unidimensionales desde dicha porción de salida a dicho primer detector (11) de forma inalámbrica.
6. El vehículo que no entra en contacto con un raíl conforme a la reivindicación 5,
en el que dicho ángulo objetivo de dirección está escrito en una ruta de circulación.
7. El vehículo que no entra en contacto con un raíl conforme a la reivindicación 1,
en el que dicha sección de control comprende además:
8. El vehículo que no entra en contacto con un raíl conforme a la reivindicación 1,
en el que dicha sección (10) de control comprende además:
9. El vehículo que no entra en contacto con un raíl conforme a la reivindicación 1, en el que dicha sección de control comprende además:
10. El vehículo que no entra en contacto con un raíl conforme a la reivindicación 9, en el que dicha sección (38) de cálculo de la solución óptima comprende una red neural configurada para determinar dicho ángulo de corrección de la dirección.
11. El vehículo que no entra en contacto con un raíl conforme a la reivindicación 9, en el que dicha sección (38) de cálculo de la solución óptima ejecuta un programa para determinar dicho ángulo de corrección de la dirección en base a un algoritmo genético.
12. El vehículo que no entra en contacto con un raíl conforme a la reivindicación 11, en el que dicha sección (38) de cálculo de la solución óptima ejecuta un programa para determinar dicho ángulo de corrección de la dirección en base a un algoritmo genético.
13. El vehículo que no entra en contacto con un raíl conforme a la reivindicación 8, en el que cuando m y n toman una combinación opcional de entre una pluralidad de combinaciones de m y n, se expresa una desviación entre una posición de dicho cuerpo principal (4) del vehículo en un recorrido emésimo y un recorrido enésimo en dicha ruta objetivo como una amplitud, y
dicha sección (38) de cálculo de la optimización determina dicho ángulo de corrección de la dirección, de forma que se minimiza una suma de los cuadrados de las amplitudes.
14. El vehículo que no entra en contacto con un raíl conforme a la reivindicación 8,
en el que cuando m y n toman una combinación opcional de entre una pluralidad de combinaciones de m y n, se expresa una aceleración de dicho cuerpo principal (4) del vehículo entre el recorrido emésimo y el recorrido enésimo en dicha ruta objetivo, y
dicha sección (38) de cálculo de la optimización determina dicho ángulo de corrección de la dirección, de forma que se minimiza una suma de los cuadrados de las aceleraciones.
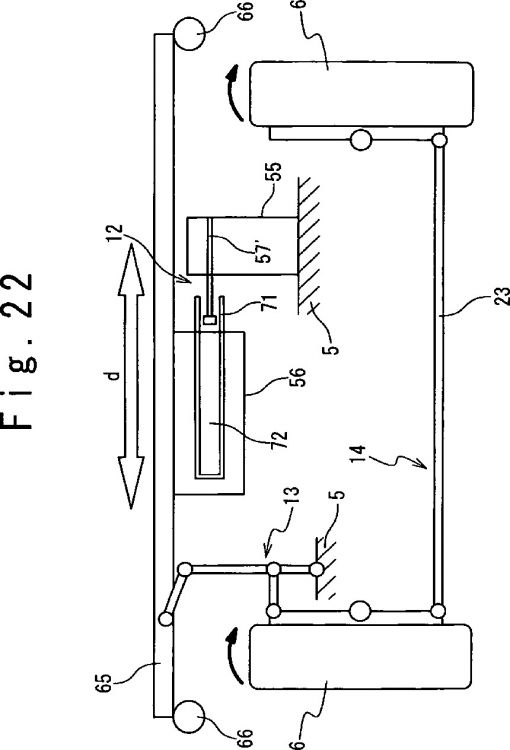
15. El vehículo que no entra en contacto con un raíl conforme a cualquiera de las reivindicaciones 1 a 14, que comprende además:
16. El vehículo que no entra en contacto con un raíl conforme a la reivindicación 15, en el que dicha porción (57, 58) de desplazamiento es un tornillo (58) de bola accionado por un motor (59) o una tuerca (57) conectada a dicho tornillo (58) de bola.
17. El vehículo que no entra en contacto con un raíl conforme a la reivindicación 15,
en el que dicha porción (57', 71) de desplazamiento es un cilindro (71) accionado con una fuente de presión de fluido o una biela (57') de pistón conectada a dicho cilindro (71).
18. Un vehículo que no entra en contacto con un raíl conforme a la reivindicación 1, que comprende:
19. El vehículo que no entra en contacto con un raíl conforme a la reivindicación 18, que comprende además:
20. El vehículo que no entra en contacto con un raíl conforme a la reivindicación 18, en el que dicho motor (59) y dichos cojinetes (60, 61) están soportados por dicha barra (65) de seguridad.
21. El vehículo que no entra en contacto con un raíl conforme a la reivindicación 19 o 20, en el que dicho aparato de dirección comprende además:
22. El vehículo que no entra en contacto con un raíl conforme a la reivindicación 18, en el que dicha tuerca (57) está soportada por dicho mecanismo articulado (13), y dicho motor (59) y dichos cojinetes (60, 61) están soportados por dicho carro (5).
23. El vehículo que no entra en contacto con un raíl conforme a cualquiera de las reivindicaciones 18 a 22, en el que dicho eje helicoidal constituye un eje de tornillo de bola.
24. Un vehículo que no entra en contacto con un raíl conforme a la reivindicación 1, que comprende:
25. El vehículo que no entra en contacto con un raíl conforme a la reivindicación 24, en el que dicho eje (63) de salida de dicho motor (59) está conectado a un cuerpo amovible por medio de piñón y cremallera.
26. Un vehículo que no entra en contacto con un raíl conforme a la reivindicación 1, que comprende:
27. El vehículo que no entra en contacto con un raíl conforme a la reivindicación 26, en el que dicha unidad de dirección comprende además:
28. Un procedimiento de dirección de un vehículo que no entra en contacto con un raíl, que comprende:
29. El procedimiento de dirección conforme a la reivindicación 28, en el que dicha desviación actual está definida como una distancia de dicha posición actual en una dirección ortogonal a dicha ruta objetivo.
30. El procedimiento de dirección conforme a la reivindicación 28, que comprende además:
31. Un procedimiento de dirección de un vehículo que no entra en contacto con un raíl conforme a la reivindicación 28, en el que una sección (20) de accionamiento comprende un motor (59), un eje de tornillo de bola conectado a un eje (63) de salida de dicho motor (59), y una tuerca (57) conectada al eje de tornillo de bola, un embrague (64) interpuesto entre dicho motor (59) y dicho eje de tornillo de bola, y un mecanismo articulado (13) conectado con dichas ruedas (6) y configurado para hacer girar el eje (63) de salida de dicho motor (59), comprendiendo adicionalmente dicho procedimiento de dirección:
Patentes similares o relacionadas:
PLATAFORMA OMNIDIRECCIONAL, del 11 de Febrero de 2019, de UNIVERSITAT POLITECNICA DE CATALUNYA: Plataforma omnidireccional. Plataforma que comprende un primer módulo con una primera rueda motriz y una segunda rueda motriz enfrentadas […]
PLATAFORMA OMNIDIRECCIONAL Y TRANSPORTADOR OMNIDIRECCIONAL, del 29 de Enero de 2019, de UNIVERSITAT POLITECNICA DE CATALUNYA: Plataforma omnidireccional y transportador omnidireccional. Plataforma omnidireccional que comprende un primer módulo con al menos de una […]
Sistema de control de vehículo para controlar la dirección del vehículo, del 21 de Septiembre de 2016, de Thunder Power New Energy Vehicle Development Company Limited: Un sistema de control para controlar la dirección de un aparato de conducción, en el que el sistema está caracterizado por: un dispositivo de proyección […]
Procedimiento para la conducción autónoma en un túnel de lavado y automóvil correspondiente, del 11 de Marzo de 2015, de AUDI AG: Procedimiento para la conducción autónoma de un automóvil en un túnel de lavado, caracterizado por: - la detección de un pasillo del túnel de lavado, - la detección […]
 Procedimientos de ayuda a la salida de estacionamiento de un vehículo, del 16 de Mayo de 2012, de PEUGEOT CITROEN AUTOMOBILES SA: Procedimiento de ayuda para la salida de estacionamiento de un vehículo , que comprende una evaluación de la distancia (DL) entre dicho vehículo […]
Procedimientos de ayuda a la salida de estacionamiento de un vehículo, del 16 de Mayo de 2012, de PEUGEOT CITROEN AUTOMOBILES SA: Procedimiento de ayuda para la salida de estacionamiento de un vehículo , que comprende una evaluación de la distancia (DL) entre dicho vehículo […]
PROCEDIMIENTO Y APARATO PARA LA UTILIZACIÓN DE UN SISTEMA AUTOMÁTICO DE SEGUIMIENTO DEL CARRIL PARA MANTENER LA SEPARACIÓN LATERAL DEL VEHÍCULO, del 15 de Diciembre de 2011, de VOLVO TECHNOLOGY CORPORATION: Un procedimiento para pilotar un vehículo que comprende: - la detección de objetos en carriles adyacentes a un carril ocupado por el vehículo que utiliza un sistema de seguimiento […]
PROCEDIMIENTO Y DISPOSITIVO PARA CONDUCIR UN VEHICULO AUTOMOVIL HACIA UNA POSICION DE DESTINO., del 1 de Abril de 2007, de DAIMLERCHRYSLER AG: Procedimiento para conducir un vehículo automóvil hacia una posición de destino; a este efecto, el vehículo automóvil es colocado en una posición de partida, situada cerca […]
 DISPOSITIVO AUXILIAR DE ESTACIONAMIENTO Y PROCEDIMIENTO PARA LA ASISTENCIA AL ESTACIONAMIENTO, del 1 de Mayo de 2009, de ROBERT BOSCH GMBH: Dispositivo auxiliar de estacionamiento para un vehículo automóvil , comprendiendo el dispositivo auxiliar de estacionamiento una unidad detectora […]
DISPOSITIVO AUXILIAR DE ESTACIONAMIENTO Y PROCEDIMIENTO PARA LA ASISTENCIA AL ESTACIONAMIENTO, del 1 de Mayo de 2009, de ROBERT BOSCH GMBH: Dispositivo auxiliar de estacionamiento para un vehículo automóvil , comprendiendo el dispositivo auxiliar de estacionamiento una unidad detectora […]