CIP-2021 : F16H 59/00 : Entradas de control de transmisiones que transmiten un movimiento rotativo para cambios de velocidad o para mecanismos de inversión.
CIP-2021 › F › F16 › F16H › F16H 59/00[m] › Entradas de control de transmisiones que transmiten un movimiento rotativo para cambios de velocidad o para mecanismos de inversión.
Notas[t] desde F15 hasta F17: TECNOLOGIA EN GENERAL
Notas[g] desde F16H 59/00 hasta F16H 63/00: Control de transmisiones que transmiten un movimiento rotativo
F16H 59/02 · Aparatos de selección.
F16H 59/04 · · Aparatos de selección de la relación.
F16H 59/06 · · · siendo la relación infinitamente variable.
F16H 59/08 · · Aparatos de selección de la gama.
F16H 59/10 · · · incluyendo palancas.
F16H 59/12 · · · incluyendo dispositivos de mando por botones pulsadores.
F16H 59/14 · siendo las entradas función del par o del par solicitado.
F16H 59/16 · · Medida dinamométrica del par.
F16H 59/18 · · función de la posición del pedal acelerador.
F16H 59/20 · · · Kickdown, es decir, reducción provocada empujando el pedal del acelerador.
F16H 59/22 · · · Posición de ralentí.
F16H 59/24 · · función de la abertura de la mariposa de válvula.
F16H 59/26 · · función de la presión.
F16H 59/28 · · · Presión del gasificador en las turbinas de gas.
F16H 59/30 · · · Depresión en el colector de admisión.
F16H 59/32 · · · Sobrepresión producida por el compresor en los motores de combustión interna.
F16H 59/34 · · función de la alimentación de carburante.
F16H 59/36 · siendo las entradas función de una velocidad.
F16H 59/38 · · de los elementos de la transmisión.
F16H 59/40 · · · Velocidad del eje de salida.
F16H 59/42 · · · Velocidad del eje de entrada.
F16H 59/44 · · función de la velocidad de la máquina (F16H 59/46 tiene prioridad).
F16H 59/46 · · función de la comparación entre velocidades.
F16H 59/48 · siendo las entradas función de una aceleración.
F16H 59/50 · siendo las entradas función del estado de la máquina, p. ej. de la posición de las puertas o de los cinturones de seguridad.
F16H 59/52 · · función del peso de la máquina, p. ej. variación del peso producida por la subida de pasajeros a un autobús.
F16H 59/54 · · función de señales provenientes de los frenos, p. ej. frenos de estacionamiento.
F16H 59/56 · · función de señales provenientes del embrague principal.
F16H 59/58 · · función de señales provenientes de la dirección.
F16H 59/60 · siendo las entradas función de las condiciones ambientales.
F16H 59/62 · · Presión atmosférica.
F16H 59/64 · · Temperatura atmosférica.
F16H 59/66 · · Estado de la carretera, p. ej. cuesta, firme resbaladizo.
F16H 59/68 · siendo las entradas función del estado de la transmisión.
F16H 59/70 · · función de la relación establecida.
F16H 59/72 · · función de las características del aceite, p. ej. temperatura, viscosidad.
F16H 59/74 · siendo las entradas función de los parámetros del motor (F16H 59/14 tiene prioridad).
F16H 59/76 · · Número de cilindros en funcionamiento.
F16H 59/78 · · Temperatura.
CIP2021: Invenciones publicadas en esta sección.
Dispositivo actuador de un cambio de marchas para coches.
(08/05/2018) 1. Dispositivo actuador de un cambio de marcha para coches con cambio de marchas automático, caracterizado porque comprende un pedal , con una parte de pisadera dimensionada para ser accionada con un pie, adaptado para colocarse en la zona de pedales del coche, comprendiendo además el dispositivo unos medios de detección del accionamiento del pedal adaptados para generar una señal de cambio de marcha y transmitir la señal de cambio de marcha mediante unos medios de transmisión al cambio de marchas del coche, estando el pedal provisto de unos medios de articulación que permiten girar la parte de pisadera entre una posición extendida, actuable con el pie, y una posición plegada, inapropiada para su uso.
2. Dispositivo…
DISPOSITIVO DE BLOQUEO PARA UNA CAJA DE CAMBIOS AUTOMÁTICA DE UN VEHÍCULO.
(23/05/2012) 1. Dispositivo de bloqueo para una caja de cambios automática de un vehículo, que comprende un mecanismo de bloqueo provisto de un núcleo móvil asociado a un sistema de accionamiento de la caja de cambios, tal que en una posición el núcleo móvil implica una marcha de funcionamiento del vehículo y en una segunda posición del núcleo móvil implica una condición de reposo del vehículo, caracterizado por el hecho de que el mecanismo de bloqueo incluye unos medios de detección que permiten detectar la posición del núcleo móvil con respecto al sistema de accionamiento de la caja de cambios.
2. Dispositivo de bloqueo según la reivindicación 1, caracterizado por el hecho de que los medios de detección comprenden un sensor hall dispuesto de forma fijada o estacionaria que está…
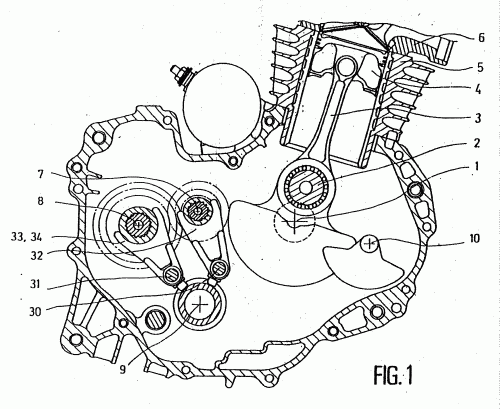
ENGRANAJE DE VELOCIDAD VARIABLE PARA MOTORES DE COMBUSTION INTERNA.
(16/12/2006). Ver ilustración. Solicitante/s: HONDA GIKEN KOGYO KABUSHIKI KAISHA. Inventor/es: KAMBE, TAKASHI, OZEKI, TAKASHI, TAKAHASHI, AKIRA, HIGASHI, YASUHIRO.
Un engranaje de velocidad variable para un motor de combustión interna, en el que la operación de cambio de marcha se realiza haciendo girar una placa en estrella fijada a un tambor de desplazamiento al hacer girar un husillo de cambio , y un rodillo retenedor (55b) es presionado contra, y encajado con, un rebaje (54b) de la periferia externa de dicha placa en estrella , en el que se ejerce una fuerza de presión hacia el centro de rotación (B) de dicho tambor de desplazamiento sobre el rodillo retenedor (55b), que se caracteriza porque el centro de rotación de dicho rodillo retenedor está dispuesto sobre una línea recta (X) que conecta el centro de rotación (A) de dicho husillo de cambio con el centro de rotación (B) de dicho tambor de desplazamiento.
DISPOSITIVO DE CONTROL Y PROCEDIMIENTO DE CONTROL PARA UN ENGRANAJE DE REGULACION CONTINUA.
(16/03/2000) LA INVENCION SE REFIERE A UN EQUIPO DE CONTROL ASI COMO A UN PROCESO DE CONTROL PARA UN ENGRANAJE SIN ETAPAS DE UN AUTOMOVIL ACCIONADO ESPECIALMENTE CON UN MOTOR DE COMBUSTION INTERNA, DONDE EL EQUIPO DE CONTROL ESTA PROVISTO CON UN EQUIPO DE ELECCION Y ESTE EQUIPO DE CONTROL AJUSTA UN ENGRANAJE CONFIGURADO DE FORMA ESCALONADA. EL EQUIPO DE CONTROL SE COMPONE DE UN GRUPO DE TRANSFORMACIONES AJUSTADAS UNA CON RESPECTO A OTRA A ELECCION EN EL ENGRANAJE. PARA EVITAR UNA CONEXION PENDULAR SE PROPONE QUE EL EQUIPO DE CONTROL DE ACUERDO CON UN EQUIPO DE RECONOCIMIENTO PARA LA SITUACION DE DESPLAZAMIENTO, EN LA QUE EL SALDO DE TRANSMISION ES GRANDE, SE AMPLIE Y ADEMAS SE HAYA PREVISTO UN EQUIPO…
PROCEDIMIENTO Y DISPOSITIVO PARA GOBIERNO DE UN MECANISMO CONECTADO AUTOMATICAMENTE.
(16/11/1995). Solicitante/s: DR.ING.H.C. F. PORSCHE AKTIENGESELLSCHAFT ROBERT BOSCH GMBH ZF FRIEDRICHSHAFEN AKTIENGESELLSCHAFT. Inventor/es: RUNGE, WOLFGANG, GRUHLE, WOLF-DIETER, WEHR, THOMAS, WENDEL, PETER, ESCHRICH, GERHARD, DIPL.-ING., SCHWAMM, RONALD, DIPL.-ING., STEHLE, HEINZ, DIPL.-ING.HAMM. LUDWIG, DIPL.-ING, FOELDI, THOMAS, DIPL.-ING., SEIDEL, WILLI, DIPL.-ING., JUDASCHKE, UDO, DIPL.-ING., PETERSMANN, JOSEPH, DIPL.-ING.
PARA ADAPTAR LAS CARACTERISTICAS DE CONEXION DE UN MECANISMO CONECTADO AUTOMATICAMENTE, GOBERNADO ELECTROHIDRAULICAMENTE , PERMANENTEMENTE AL ESTILO DE CONDUCIR DEL CONDUCTOR O A UNA SITUACION DOMINANTE DEL TRAFICO, SE COMPRENDEN, JUNTO A LA POSICION DE COMPUERTAS DE ESTRANGULAMIENTO (ALFA), TAMBIEN LA VELOCIDAD DE MARCHA (V), LA ACELERACION TRANSVERSAL (AQ), LA ACELERACION LONGITUDINAL (ALB), LA DEMORA LONGITUDINAL (ALV) Y EL NUMERO DE REVOLUCIONES DEL MOTOR (NMOT), Y SE ESTABLECEN CONJUNTAMENTE POR UNA DISTRIBUCION DE MARCAS Y UNA FUNCION DE VINCULACION PARA UN TAMAÑO DE MARCA, DEL QUE SE AVERIGUA UNA ACTIVIDAD DE MARCHA MEDIANTE UN FILTRADO. ESTA ACTIVIDAD DE MARCHA SIVE PARA LA SELECCION DE UN PROGRAMA DE CONEXION, DE UNA CANTIDAD DE PROGRAMAS DE CONEXION SITUADOS ENTRE UN PROGRAMA DE CONEXION (SKF1) OPTIMO PARA EL USUARIO, Y UN PROGRAMA DE CONEXION (SKF5) OPTIMO PARA EL PRODUCTOR.
RELACION DE DIFERENCIA ENTRE EL RENDIMIENTO OPTIMO Y EL REAL DE UN CONVERTIDOR DE TORSION EN BASE AL DESCENSO DE LA POTENCIA DE MULTIPLICACION.
(01/10/1995). Solicitante/s: EATON CORPORATION. Inventor/es: BOARDMAN, MARK DAVID.
SE SUMINISTRA UNA ESTRATEGIA (FIG. 6) PARA UN METODO / SISTEMA DE CONTROL DE DESCENSO DE POTENCIA, EN BASE A LA DIFERENCIA ENTRE EL RENDIMIENTO OPTIMO Y EL REAL DE UN CONVERTIDOR DE TORSION PARA UN SISTEMA DE TRANSMISION MECANICA AUTOMATICA QUE INCLUYE UN MOTOR , UNA TRANSMISION MECANICA Y UN CONVERTIDOR DE TORSION INTERPUESTO ENTRE EL MOTOR Y LA TRANSMISION. EN EL COMIENZO DE UN DESCENSO DE POTENCIA, LA MARCHA A BUSCAR SE DERIVA DE LA DIFERENCIA DE RENDIMIENTO DEL CONVERTIDOR DE TORSION, DE LA ACELERACION DEL VEHICULO, DE LA MARCHA ACTUAL Y DE LA DEMANDA DEL REGULADOR DE ACELERACION. ESTAS CUATRO CONDICIONES DEL VEHICULO SON LOS PARAMETROS DE UNA MATRIZ TETRADIMENSIONAL DE TAL MANERA QUE EL INCREMENTO DE LOS VALORES DE CADA PARAMETRO PROMUEVE UN POTENCIAL MAYOR PARA EL DESCENSO DE LA POTENCIA DE MULTIPLICACION.
DISPOSITIVO VARIADOR DE VELOCIDAD CONTINUO, CON CONTROL DE PAR Y VELOCIDAD EN SALIDA DE CUATRO CUADRANTES.
(16/12/1993). Solicitante/s: LOZANO GUTIERREZ, JOSE MARIA.
DISPOSITIVO VARIADOR DE VELOCIDAD CONTINUO, CON CONTROL DE PAR Y VELOCIDAD EN SALIDA DE CUATRO CUADRANTES, QUE BASANDOSE EN UN TREN EPICICLOIDL Y EN UNAS POLEAS QUE MEDIANTE LAS CORRESPONDIENTES CORREAS TRANSMITEN EL MOVIMIENTO DE GIRO CORRESPONDIENTE, ESENCIALMENTE SE CARACTERIZA PORQUE EL TREN EPICICLOIDAL ES DOBLE Y ESTA DETERMINADO POR UN TREN EPICICLOIDAL CONSTITUTIVO DE UN MECANISMO REDUCTOR INTERMEDIO Y DE UN TREN EPICICLOIDAL INTEGRADOR, MIENTRAS QUE EL CONJUNTO DE POLEAS VARIADORAS ESTA DETERMINADO POR DOS VARIADORES DE POLEAS MONTADOS SOBRE EL CORRESPONDIENTE EJE PRINCIPAL DE ENTRADA Y UN EJE AUXILIAR DESPLAZABLE AXIALMENTE, HABIENDOSE PREVISTO QUE EL EJE DE SALIDA DEL SEGUNDO VARIADOR DE POLEAS ESTE ALINEADO CON EL EJE DE ENTRADA DEL PRIMER VARIADOR, MIENTRAS QUE EL EJE DE SALIDA DE ESTE PRIMER VARIADOR ES SOLIDARIO CON EL EJE DE ENTRADA DEL SEGUNDO VARIADOR.
PERFECCIONAMIENTOS INTRODUCIDOS EN LOS DISPOSITIVOS DE CAMBIO DE MARCHA HIDRAULICO PARA CAMBIOS DE MARCHA EMBRAGABLES BAJO CARGA.
(01/05/1977). Solicitante/s: ZAHNRADFABRIK FRIEDRICHSHAFEN A. G..
Resumen no disponible.
{kind=link}