VEHÍCULO ELEVADOR CON SISTEMA Y PROCEDIMIENTO DE CONTROL DE ENVOLVENTE DE CAPACIDAD MÚLTIPLE.
Un sistema de control de envolvente múltiple para un vehículo elevador (10),
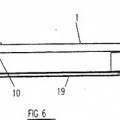
incluyendo el vehículo elevador una plataforma (28) montada en un brazo principal telescópico (24), estando configurado el brazo principal para una función de elevación/descenso y una función telescópica, comprendiendo el sistema de control de envolvente múltiple: un interruptor selector (36) para seleccionar entre una pluralidad de modos de capacidad que incluyen al menos un modo de carga baja y un modo de carga elevada; una pluralidad de sensores (44, 46) colocados estratégicamente en el brazo principal, definiendo los sensores cooperativamente zonas de posición de la plataforma; y un sistema de control que se comunica con el interruptor selector y la pluralidad de sensores, recibiendo el sistema de control la salida procedente de la pluralidad de sensores para determinar en qué zona de posición está situada la plataforma, en el que el sistema de control controla una envolvente de la plataforma basándose en una posición del interruptor selector, en el que la pluralidad de sensores comprende interruptores de fin de carrera, caracterizado porque las zonas de posición definidas por la pluralidad de sensores comprenden una pluralidad de regiones de longitud que corresponden a una longitud extendida del brazo principal, y porque los interruptores de fin de carrera comprenden primer y segundo interruptores de capacidad múltiple (46) y primer y segundo interruptores de transporte principales (44), estando configurado el sistema de control para usar respectivamente lógica de leva opuesta con los interruptores de capacidad múltiple y los interruptores de transporte principales para determinar en qué región de longitud está situada la plataforma, en el que cada uno de los interruptores de transporte principales se desplaza sobre superficies de leva (51, 52) respectivas a medida que el brazo principal es extendido o retraído, y cada uno de los interruptores de capacidad múltiple se desplaza sobre superficies de leva (53, 54) respectivas, de manera que, dependiendo de si la combinación de interruptores está "sobre leva" o "fuera de leva", el sistema de control determina en qué región de longitud está colocado el brazo principal
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2005/002778.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 1 JLG DRIVE MCCONNELLSBURG, PA 17233-9533 ESTADOS UNIDOS DE AMERICA.
Inventor/es: BEAN,ANDREW,JAY, SMITH,James,Latin.
Fecha de Publicación: .
Fecha Solicitud PCT: 28 de Enero de 2005.
Clasificación Internacional de Patentes:
B66F11/04B2
B66F17/00D
Clasificación PCT:
B66F11/04TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66F ELEVACION, LEVANTAMIENTO, REMOLQUE O EMPUJE, NO PREVISTOS EN OTRO LUGAR, p. ej. DISPOSITIVOS CUYA FUERZA DE LEVANTAMIENTO O EMPUJE SE APLICA DIRECTAMENTE SOBRE LA SUPERFICIE DE LA CARGA (montaje de islas artificiales sobre pilotes o soportes similares E02B 17/00; andamiajes combinados con aparatos de elevación E04G 1/22, E04G 3/28; dispositivos de elevación para encofrados deslizantes E04G 11/24; sobreelevación de edificios E04G 23/06; puntales o tirantes E04G 25/00; elevadores u otros dispositivos de elevación de escaleras E06C 7/12; puntales para minería E21D 15/00). › B66F 11/00 Dispositivos de elevación adaptados especialmente a fines especiales, no previstos en otro lugar (dispositivos sobre los vehículos, que toman contacto con el suelo para soportar, elevar o maniobrar el vehículo B60S 9/00). › para plataformas o cabinas móviles, p. ej. sobre vehículos, que permiten a los obreros ocupar cualquier posición conveniente para ejecutar los trabajos requeridos (plataformas para limpiar las ventanas A47L 3/02; dispositivos para rescatar personas de los edificios de construcción A62B 1/02; bajo el aspecto vehículo en lo que se refiere a vehículos utilitarios B60P 3/14; pasarelas para el mantenimiento de puentes E01D 19/10; andamiajes sobre basamentos extensibles E04G 1/22; plataformas susceptibles de ser elevadas o bajadas, utilizables sobre escalas E06C 7/16).
B66F17/00B66F […] › Dispositivos de seguridad, p. ej. para limitar o indicar la fuerza de elevación.
Clasificación antigua:
B66F11/04B66F 11/00 […] › para plataformas o cabinas móviles, p. ej. sobre vehículos, que permiten a los obreros ocupar cualquier posición conveniente para ejecutar los trabajos requeridos (plataformas para limpiar las ventanas A47L 3/02; dispositivos para rescatar personas de los edificios de construcción A62B 1/02; bajo el aspecto vehículo en lo que se refiere a vehículos utilitarios B60P 3/14; pasarelas para el mantenimiento de puentes E01D 19/10; andamiajes sobre basamentos extensibles E04G 1/22; plataformas susceptibles de ser elevadas o bajadas, utilizables sobre escalas E06C 7/16).
B66F17/00B66F […] › Dispositivos de seguridad, p. ej. para limitar o indicar la fuerza de elevación.
Países PCT: Alemania, España, Francia, Reino Unido, Italia.
Vehículo elevador con sistema y procedimiento de control de envolvente de capacidad múltiple ANTECEDENTES DE LA INVENCIÓN La presente invención se refiere a vehículos elevadores tales como vehículos de plataforma de trabajos aéreos, manipuladores telescópicos, y similares y, más particularmente, a un vehículo elevador que incluye un sistema de capacidad múltiple con control de envolvente múltiple. Se conocen vehículos elevadores de brazo que incluyen un brazo de torre acoplado de manera pivotante a una base del vehículo, y un brazo principal acoplado de manera pivotante a un extremo opuesto del brazo de torre. Uno del brazo de torre y el brazo principal o ambos también pueden ser capaces de expansión y retracción mediante secciones telescópicas. Un brazo de pescante puede estar conectado de manera pivotante en un extremo del brazo principal para sostener una plataforma de trabajo aéreo. Los vehículos elevadores existentes definen típicamente una envolvente de funcionamiento seguro para colocar la plataforma de trabajo aéreo en relación con la base del vehículo. La envolvente se determina convencionalmente basándose en una capacidad de carga máxima de la plataforma de trabajo aéreo. Como consecuencia, cuando la plataforma de trabajo aéreo sostiene una masa colectiva inferior a la carga máxima, las posiciones de funcionamiento seguro de la plataforma de trabajo aéreo pueden extenderse, de hecho, más allá de la envolvente. Como consecuencia, cuando la plataforma de trabajo aéreo sostiene una carga reducida, el vehículo no se está usando a sus plenas capacidades. El 1350SJP de JLG Inc. utilizaba un sistema de control de doble capacidad en el que la envolvente era limitada automáticamente por el sistema de control para permanecer dentro de envolventes seleccionables. El procedimiento previo era meramente un sistema de indicación en el que la envolvente se indicaba al operador, quien tenía la responsabilidad de impedir que el brazo saliera de la envolvente correspondiente a la capacidad deseada. El 1350SJP tenía, como parte del sistema de control primario, sensores de medición de longitud infinita y ángulo infinito necesarios para determinar la posición del brazo dentro de la envolvente, ya que ninguna de las envolventes podría estar delimitada por límites mecánicos. Las longitudes y los ángulos infinitos conocidos se usaban para redefinir la forma de la envolvente para la envolvente de capacidad restringida. El 1350SJP usaba un arco controlado para navegar automáticamente por los bordes de la envolvente de la misma manera para ambas capacidades. Aparte de reducir el tamaño de la envolvente y restringir la funcionalidad del pescante oscilante lateral, la máquina funcionaba igual independientemente de la selección del modo de capacidad. BREVE RESUMEN DE LA INVENCIÓN ES 2 367 902 T3 Por lo tanto, sería deseable definir múltiples envolventes de funcionamiento seguro para la plataforma de trabajo aéreo basándose en una carga reducida sostenida por la plataforma. Además, sería deseable determinar una posición de la plataforma de trabajo aéreo usando sensores menos caros como interruptores de fin de carrera para reducir así los costes de fabricación del vehículo. La presente invención propone un sistema de capacidad múltiple que engloba un sistema de control de envolvente múltiple que cambia la envolvente de trabajo admisible para que se corresponda con la capacidad seleccionada en una pluralidad de modos como un modo de carga baja (por ejemplo, capacidad de 500 lb (227 kg)) o un modo de carga elevada (por ejemplo, capacidad de 1000 lb (454 kg)) como posibles modos intermedios adicionales. El sistema presenta el modo de capacidad en paneles de visualización de la plataforma y del suelo y controla las posiciones del brazo principal dentro de la envolvente admisible para ese modo. El modo es seleccionable por el operador con un interruptor de selección de capacidad múltiple en el panel de control de la plataforma. Además, el sistema utiliza sensores económicos para determinar una posición de la plataforma de trabajo aéreo en relación con la base del vehículo. La máquina incorpora una mezcla de sensores de medición infinita e interruptores de medición de posición discreta (interruptores digitales). Debido al control de recorrido de la torre y de ángulo del brazo principal, con precisión infinita los ángulos del brazo principal son conocidos, pero la máquina no necesita la longitud infinita del brazo principal por ninguna razón aparte del control de envolvente restringida para mayor capacidad. La relación coste-beneficio para añadir medición de longitud infinita no es justificable cuando interruptores digitales menos caros pueden impedir con seguridad que el brazo llegue a posiciones fuera de los límites seguros para funcionamiento de capacidad superior. Al hacer esto, sin embargo, el sistema tiene diferentes características de funcionamiento entre modos de capacidad. Por ejemplo, en el modo de 500 lb, aparte de que los ángulos máximo y mínimo son controlados eléctricamente, el brazo principal no está restringido mecánicamente, y por lo tanto el sistema de control no tiene interacciones de elevación y telescópicas del brazo principal. En el modo de 1000 lb, el brazo principal es restringido forzando al operador a navegar alrededor de una región de longitud restringida imponiendo restricciones de interacción de ele 2 ES 2 367 902 T3 vación y telescópicas del brazo principal. Esto causará movimientos interrumpidos de la función del brazo principal no vistos en el modo de 500 lb. También es posible, si la medición de ángulo infinito no estaba ya presente como parte del control de recorrido de la torre y de ángulo del brazo principal, determinar los ángulos del brazo principal usando interruptores digitales de una manera similar a los interruptores de longitud. En una realización de ejemplo de la invención, está provisto un sistema de control de envolvente múltiple según la reivindicación 1 para un vehículo elevador. El vehículo elevador incluye una plataforma de trabajo aéreo montada en un brazo principal telescópico, que está configurado para una función de elevación/descenso y una función telescópica. El sistema de control de envolvente múltiple incluye un interruptor selector para seleccionar entre una pluralidad de modos de capacidad que incluyen al menos un modo de carga baja y un modo de carga elevada, y una pluralidad de sensores, preferentemente interruptores de fin de carrera, colocados estratégicamente en el brazo principal que definen cooperativamente zonas de posición de la plataforma de trabajo aéreo. Un sistema de control que se comunica con el interruptor selector y la pluralidad de sensores recibe la salida procedente de la pluralidad de sensores para determinar en qué zona de posición está situada la plataforma de trabajo aéreo. El sistema de control controla una envolvente de la plataforma de trabajo aéreo basándose en una posición del interruptor selector. En una disposición, el sistema de control controla una posición del interruptor selector según una carga detectada sobre la plataforma. El sistema de control puede configurarse de manera que cuando el interruptor selector está en el modo de carga elevada, el sistema de control impide selectivamente al menos una de la función de elevación/descenso y la función telescópica basándose en la zona de posición en la que está situada la plataforma de trabajo aéreo. En este contexto, el sistema de control está configurado para impedir selectivamente al menos una de la función de elevación/descenso y la función telescópica cuando un ángulo del brazo principal en relación con la gravedad está entre +55º y -45º. Puede activarse una alarma cuando la plataforma de trabajo aéreo está colocada en una posición fuera de la envolvente, o cuando el interruptor selector se cambia del modo de carga baja a un modo de carga más alta con la plataforma de trabajo aéreo situada fuera de la envolvente. Las zonas de posición definidas por la pluralidad de sensores incluyen preferentemente una pluralidad de regiones de ángulo, como ocho regiones de ángulo, que corresponden a un ángulo del brazo principal en relación con la gravedad, y una pluralidad de regiones de longitud, como cuatro regiones de longitud, que corresponden a una longitud extendida del brazo principal. Además, el sistema de control puede configurarse para permitir la función de elevación/descenso y la función telescópica del brazo principal según el siguiente plan, donde A-D corresponden a las cuatro regiones de longitud y R1-R8 corresponden a las ocho regiones de ángulo. Zona de capacidad múltiple del brazo principal Funciones A B C D Elevar brazo principal R1, R2, R3, R4, R5, R1, R2, R3, R4, R5, R1, R2, R3, R4, R5, R1, R2, R3, R4, R8 R6, R7, R8 R6, R7, R8 R6, R7,... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de control de envolvente múltiple para un vehículo elevador (10), incluyendo el vehículo elevador una plataforma (28) montada en un brazo principal telescópico (24), estando configurado el brazo principal para una función de elevación/descenso y una función telescópica, comprendiendo el sistema de control de envolvente múltiple: un interruptor selector (36) para seleccionar entre una pluralidad de modos de capacidad que incluyen al menos un modo de carga baja y un modo de carga elevada; una pluralidad de sensores (44, 46) colocados estratégicamente en el brazo principal, definiendo los sensores cooperativamente zonas de posición de la plataforma; y un sistema de control que se comunica con el interruptor selector y la pluralidad de sensores, recibiendo el sistema de control la salida procedente de la pluralidad de sensores para determinar en qué zona de posición está situada la plataforma, en el que el sistema de control controla una envolvente de la plataforma basándose en una posición del interruptor selector, en el que la pluralidad de sensores comprende interruptores de fin de carrera, caracterizado porque las zonas de posición definidas por la pluralidad de sensores comprenden una pluralidad de regiones de longitud que corresponden a una longitud extendida del brazo principal, y porque los interruptores de fin de carrera comprenden primer y segundo interruptores de capacidad múltiple (46) y primer y segundo interruptores de transporte principales (44), estando configurado el sistema de control para usar respectivamente lógica de leva opuesta con los interruptores de capacidad múltiple y los interruptores de transporte principales para determinar en qué región de longitud está situada la plataforma, en el que cada uno de los interruptores de transporte principales se desplaza sobre superficies de leva (51, 52) respectivas a medida que el brazo principal es extendido o retraído, y cada uno de los interruptores de capacidad múltiple se desplaza sobre superficies de leva (53, 54) respectivas, de manera que, dependiendo de si la combinación de interruptores está sobre leva o fuera de leva, el sistema de control determina en qué región de longitud está colocado el brazo principal. 2. Un sistema de control de envolvente múltiple según la reivindicación 1, en el que el sistema de control está configurado de manera que cuando el interruptor selector está en el modo de carga elevada, el sistema de control impide selectivamente al menos una de la función de elevación/descenso y la función telescópica basándose en la zona de posición en la que está situada la plataforma. 3. Un sistema de control de envolvente múltiple según la reivindicación 2, en el que el sistema de control está configurado para impedir selectivamente al menos una de la función de elevación/descenso y la función telescópica cuando el ángulo del brazo principal en relación con la gravedad está entre +55 y -45. 4. Un sistema de control de envolvente múltiple según la reivindicación 1, que además comprende medios de alarma para activar una alarma cuando la plataforma está colocada en una posición fuera de la envolvente. 5. Un sistema de control de envolvente múltiple según la reivindicación 1, en el que las zonas de posición definidas por la pluralidad de sensores comprenden una pluralidad de regiones de ángulo que corresponden a un ángulo del brazo principal en relación con la gravedad y una pluralidad de regiones de longitud que corresponden a una longitud extendida del brazo principal. 6. Un sistema de control de envolvente múltiple según la reivindicación 5, en el que las zonas de posición definidas por la pluralidad de sensores comprenden ocho regiones de ángulo que corresponden al ángulo del brazo principal en relación con la gravedad y cuatro regiones de longitud que corresponden a la longitud extendida del brazo principal. 7. Un sistema de control de envolvente múltiple según la reivindicación 6, en el que el sistema de control está configurado para permitir la función de elevación/descenso y la función telescópica del brazo principal según el siguiente plan, donde A-D corresponden a las cuatro regiones de longitud y R1-R8 corresponden a las ocho regiones de ángulo: Funciones A B C D Elevar brazo principal R1, R2, R3, R4, R5, R1, R2, R3, R4, R5, R1, R2, R3, R4, R5, R1, R2, R3, R4, R8 R6, R7, R8 R6, R7, R8 R6, R7, R8 Bajar brazo principal R1, R2, R3, R4, R5, R1, R2, R3, R4, R5, R1, R2, R3, R4, R5, R1, R5, R6, R7, R8 R6, R7, R8 R6, R7, R8 R6, R7, R8 Extender brazo principal R1, R2, R3, R4, R5, R1, R2, R3, R4, R5, R1, R2, R7, R8 R1, R2, R7, R8 R6, R7, R8 R6, R7, R8 Retraer brazo principal R1, R2, R3, R4, R5, R1, R2, R3, R4, R5, R1, R2, R3, R4, R5, R1, R2, R3, R6, R7, R6, R7, R8 R6, R7, R8 R6, R7, R8 R8 8 8. Un sistema de control de envolvente múltiple según la reivindicación 1, en el que las zonas de posición definidas por la pluralidad de sensores comprenden cuatro regiones de longitud (A, B, C, D) que corresponden a una longitud extendida del brazo principal, determinando el sistema de control la región de longitud en la que está situada la plataforma de acuerdo con el siguiente plan: Interruptor de cap. múltiple #1 Interruptor de cap. múltiple #2 Conclusión de los interruptores de cap. múltiple por el sistema de control Interruptor de transporte principal #1 Interruptor de transporte principal #2 Conclusión de los interruptores de transporte principales por el sistema de control Conclusión de la longitud del brazo principal por el sistema de control Estados del interruptor/Regiones de longitud del brazo Fuera Fuera de leva Fuera de Desacuerdo Sobre Sobre leva Sobre Desacuerdo Desacuerdo de leva leva leva leva Sobre Sobre leva Sobre Desacuerdo Fuera de Fuera de Fuera Desacuerdo Desacuerdo leva leva leva leva de leva B/A B/A B/A Desacuerdo C/D C/D C/D Desacuerdo Desacuerdo Fuera de leva Sobre leva Desacuerdo Desacuerdo Sobre leva Fuera de leva Sobre leva Fuera de leva Sobre leva Fuera de leva Desacuerdo Desacuerdo Fuera de leva Sobre leva Fuera de leva Sobre leva Desacuerdo Desacuerdo A/D Desacuerdo B/C B/C B/C Desacuerdo A/D A/D Desacuerdo A A/B B B/C C C/D D Fallo de interruptor Fallo de interruptor 9. Un sistema de control de envolvente múltiple según la reivindicación 1, en el que el sistema de control controla una posición del interruptor selector según una carga detectada sobre la plataforma. 10. Un vehículo elevador (10) que comprende: ES 2 367 902 T3 una base del vehículo (12); un brazo de torre (18) acoplado de manera pivotante por un extremo a la base del vehículo; un brazo principal telescópico (24) acoplado de manera pivotante al brazo de torre por un extremo opuesto del mismo; una plataforma (28) montada en el brazo principal telescópico, estando configurado el brazo principal telescópico para una función de elevación/descenso y una función telescópica; y un sistema de control de envolvente múltiple que incluye: un interruptor selector (36) para seleccionar entre una pluralidad de modos de capacidad que incluyen al menos un modo de carga baja y un modo de carga elevada; una pluralidad de sensores (44, 46) colocados estratégicamente en el brazo principal, definiendo los sensores cooperativamente zonas de posición de la plataforma; y un sistema de control que se comunica con el interruptor selector y la pluralidad de sensores, recibiendo el sistema de control la salida procedente de la pluralidad de sensores para determinar en qué zona de posición está situada la plataforma, en el que el sistema de control controla una envolvente de la plataforma basándose en una posición del interruptor selector, y en el que las zonas de posición definidas por la pluralidad de sensores comprenden una pluralidad de regiones de ángulo que corresponden a un ángulo del brazo principal en relación con la gravedad y una pluralidad de regiones de longitud que corresponden a una longitud extendida del brazo principal, en el que la pluralidad de sensores comprende interruptores de fin de carrera, caracterizado porque las zonas de posición definidas por la pluralidad de sensores comprenden una pluralidad de regiones de longitud que corresponden a una longitud extendida del brazo principal, y porque los interruptores de fin de carrera comprenden primer y segundo interruptores de capacidad múltiple (46) y primer y segundo interruptores de transporte principales (44), estando configurado el sistema de control para usar respectivamente lógica de leva opuesta con los interruptores de capacidad múltiple y los interruptores de transporte principales para determinar en qué región de longitud está situada la plataforma, en el que cada uno de los interruptores de transporte principales se desplaza sobre superficies de leva (51, 52) respectivas a medida que el brazo principal es extendido o retraído, y cada uno de los interruptores de capacidad múltiple se desplaza sobre superficies de leva (53, 54) respectivas, de manera que, dependiendo de si la combinación de interruptores está sobre leva o fuera de leva, el sistema de 9 ES 2 367 902 T3 control determina en qué región de longitud está colocado el brazo principal. 11. Un procedimiento de control de una envolvente de una plataforma (28) en un vehículo elevador (10), incluyendo el vehículo elevador la plataforma montada en un brazo principal telescópico (24), estando configurado el brazo principal para una función de elevación/descenso y una función telescópica, incluyendo además la plataforma un interruptor selector (36) para seleccionar entre una pluralidad de modos de capacidad que incluyen al menos un modo de carga baja y un modo de carga elevada, una pluralidad de sensores (44, 46) colocados estratégicamente en el brazo principal y que definen cooperativamente zonas de posición discretas de la plataforma, y un sistema de control que se comunica con el interruptor selector y la pluralidad de sensores, en el que la pluralidad de sensores comprende interruptores de fin de carrera, caracterizado porque las zonas de posición definidas por la pluralidad de sensores comprenden una pluralidad de regiones de longitud que corresponden a una longitud extendida del brazo principal, y porque los interruptores de fin de carrera comprenden primer y segundo interruptores de capacidad múltiple y primer y segundo interruptores de transporte principales, estando configurado el sistema de control para usar respectivamente lógica de leva opuesta con los interruptores de capacidad múltiple y los interruptores de transporte principales para determinar en qué región de longitud está situada la plataforma, en el que cada uno de los interruptores de transporte principales se desplaza sobre superficies de leva (51, 52) respectivas a medida que el brazo principal es extendido o retraído, y cada uno de los interruptores de capacidad múltiple se desplaza sobre superficies de leva (53, 54) respectivas, de manera que, dependiendo de si la combinación de interruptores está sobre leva o fuera de leva, el sistema de control determina en qué región de longitud está colocado el brazo principal, comprendiendo el procedimiento: (a) recibir el sistema de control la salida procedente de la pluralidad de sensores y determinar en qué zona de posición está situada la plataforma; y (b) controlar una envolvente de la plataforma basándose en una posición del interruptor selector impidiendo selectivamente al menos una de la función de elevación/descenso y la función telescópica basándose en la zona de posición en la que está situada la plataforma. 12. Un procedimiento según la reivindicación 11, en el que la etapa (b) se pone en práctica cuando el interruptor selector está en la posición de carga elevada. 13. Un procedimiento según la reivindicación 12, en el que la etapa (b) se pone en práctica impidiendo selectivamente al menos una de la función de elevación/descenso y la función telescópica cuando el ángulo del brazo principal en relación con la gravedad está entre +55 y -45. 14. Un procedimiento según la reivindicación 11, que además comprende activar una alarma cuando la plataforma está colocada en una posición fuera de la envolvente. 15. Un procedimiento según la reivindicación 11, en el que la plataforma está sostenida por un pescante acoplado con el brazo principal, comprendiendo además el procedimiento impedir la oscilación del pescante cuando el interruptor selector está en la posición de carga elevada. 16. Un procedimiento según la reivindicación 11, que además comprende activar una alarma cuando se selecciona el modo de carga elevada y la plataforma está colocada fuera de la envolvente. 17. Un procedimiento según la reivindicación 11, que además comprende colocar los sensores en el brazo principal de manera que las zonas de posición comprenden una pluralidad de regiones de ángulo que corresponden a un ángulo del brazo principal en relación con la gravedad y una pluralidad de regiones de longitud que corresponden a una longitud extendida del brazo principal. 18. Un procedimiento según la reivindicación 17, en el que las zonas de posición definidas por la pluralidad de sensores comprenden ocho regiones de ángulo que corresponden al ángulo del brazo principal en relación con la gravedad y cuatro regiones de longitud que corresponden a la longitud extendida del brazo principal. 19. Un procedimiento según la reivindicación 18, que además comprende permitir la función de elevación/descenso y la función telescópica del brazo principal según el siguiente plan, donde A-D corresponden a las cuatro regiones de longitud y R1-R8 corresponden a las ocho regiones de ángulo: Funciones A B C D Elevar brazo principal R1, R2, R3, R4, R5, R1, R2, R3, R4, R5, R1, R2, R3, R4, R5, R1, R2, R3, R4, R8 R6, R7, R8 R6, R7, R8 R6, R7, R8 Bajar brazo principal R1, R2, R3, R4, R5, R1, R2, R3, R4, R5, R1, R2, R3, R4, R5, R1, R5, R6, R7, R8 R6, R7, R8 R6, R7, R8 R6, R7, R8 Extender brazo prin R1, R2, R3, R4, R5, R1, R2, R3, R4, R5, R1, R2, R7, R8 R1, R2, R7, R8 cipal R6, R7, R8 R6, R7, R8 Retraer brazo princi R1, R2, R3, R4, R5, R1, R2, R3, R4, R5, R1, R2, R3, R4, R5, R1, R2, R3, R6, R7, R8 pal R6, R7, R8 R6, R7, R8 R6, R7, R8 20. Un procedimiento según la reivindicación 11, que además comprende: colocar los sensores en el brazo principal de manera que las zonas de posición comprenden una pluralidad de regiones de longitud que corresponden a una 5 longitud extendida del brazo principal, comprendiendo los sensores primer y segundo interruptores de capacidad múltiple y primer y segundo interruptores de transporte principales; y usar respectivamente lógica de leva opuesta con los interruptores de capacidad múltiple y los interruptores de transporte principales para determinar en qué región de longitud está situada la plataforma. 10 21. Un procedimiento según la reivindicación 20, en el que las zonas de posición definidas por la pluralidad de sensores comprenden cuatro regiones de longitud (A, B, C, D) que corresponden a una longitud extendida del brazo principal, comprendiendo además el procedimiento determinar la región de longitud en la que está situada la plataforma de acuerdo con el siguiente plan: Interruptor de cap. múltiple #1 Interruptor de cap. múltiple #2 Conclusión de los interruptores de cap. múltiple por el sistema de control Interruptor de transporte principal #1 Interruptor de transporte principal #2 Conclusión de los interruptores de transporteprincipales por el sistema de control Conclusión de la longitud del brazo principal por el sistema de control Fuera de leva Sobre leva Fuera de leva Sobre leva Estados del interruptor/Regiones de longitud del brazo Fuera Desacuerdo Sobre Sobre leva Sobre Desacuerdo de leva leva leva Sobre leva Desacuerdo Fuera de leva Fuera de leva Fuera de leva Desacuerdo Desacuerdo Desacuerdo B/A B/A B/A Desacuerdo C/D C/D C/D Desacuerdo Desacuerdo Fuera de leva Sobre leva Desacuerdo Desacuerdo Fuera de leva Sobre leva ES 2 367 902 T3 Fuera de leva Sobre leva Fuera de leva Sobre leva Desacuerdo Desacuerdo Fuera de leva Sobre leva Fuera de leva Sobre leva Desacuerdo Desacuerdo A/D Desacuerdo B/C B/C B/C Desacuerdo A/D A/D Desacuerdo A A/B B B/C C C/D D Fallo de interruptor 11 Fallo de interruptor ES 2 367 902 T3 12 ES 2 367 902 T3 13 ES 2 367 902 T3 14
Patentes similares o relacionadas:
GRÚA DE CÁMARA TELESCÓPICA, del 29 de Abril de 2011, de ADAMIEC, PETER EDWARDS, KEITH: Grúa de cámara telescópica que comprende un soporte, una pluralidad de correas de accionamiento y la misma pluralidad de brazos , comprendiendo […]
VEHICULO CON BRAZO ELEVADOR Y PROCEDIMIENTO PARA CONTROLAR LAS FUNCIONES DE ELEVACION, del 8 de Septiembre de 2010, de JLG INDUSTRIES,INC.: Procedimiento para controlar los ángulos del brazo en un vehículo con brazo elevador, incluyendo el vehículo con brazo elevador un brazo de torre acoplado en forma […]
PROCEDIMIENTO PARA INSTALAR UNA MÁQUINA DE TRABAJO MÓVIL, del 15 de Junio de 2011, de Putzmeister Engineering GmbH Universität Stuttgart: Procedimiento para instalar una máquina de trabajo móvil, en el que el suelo en un lugar de trabajo se analiza en lo referente a su constitución y/o su capacidad portante […]
SISTEMA DE DETECCIÓN DE OBSTRUCCIONES, del 18 de Marzo de 2011, de JLG INDUSTRIES,INC.: Sistema de detección de obstrucciones adecuado para un vehículo elevador que incluye una plataforma elevadora , comprendiendo el […]
Plataforma de trabajo con protección contra funcionamiento involuntario sostenido, del 27 de Mayo de 2020, de JLG INDUSTRIES,INC.: Una plataforma de trabajo combinada y un sistema para detectar obstáculos próximos, la plataforma de trabajo incluye un panel de […]
Una plataforma aérea autopropulsada, del 13 de Mayo de 2020, de Magni Telescopic Handlers S.r.l: Una plataforma aérea autopropulsada que incluye una plataforma de trabajo proporcionada en el extremo de un brazo operativo que está soportado […]
Dispositivo de protección contra caídas, del 6 de Mayo de 2020, de IVECO MAGIRUS AG: Dispositivo de protección contra caídas , que comprende un módulo con un adaptador para unir de manera extraíble el módulo en el extremo de un aparato […]
Sistema que comprende una plataforma de trabajo giratoria, del 1 de Abril de 2020, de Scanclimber Oy: Sistema que comprende:
una estructura de mástil sustancialmente vertical;
una estructura de armazón que está conectada a la estructura […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 GRÚA DE CÁMARA TELESCÓPICA, del 29 de Abril de 2011, de ADAMIEC, PETER EDWARDS, KEITH: Grúa de cámara telescópica que comprende un soporte, una pluralidad de correas de accionamiento y la misma pluralidad de brazos , comprendiendo […]
GRÚA DE CÁMARA TELESCÓPICA, del 29 de Abril de 2011, de ADAMIEC, PETER EDWARDS, KEITH: Grúa de cámara telescópica que comprende un soporte, una pluralidad de correas de accionamiento y la misma pluralidad de brazos , comprendiendo […]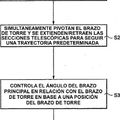 VEHICULO CON BRAZO ELEVADOR Y PROCEDIMIENTO PARA CONTROLAR LAS FUNCIONES DE ELEVACION, del 8 de Septiembre de 2010, de JLG INDUSTRIES,INC.: Procedimiento para controlar los ángulos del brazo en un vehículo con brazo elevador, incluyendo el vehículo con brazo elevador un brazo de torre acoplado en forma […]
VEHICULO CON BRAZO ELEVADOR Y PROCEDIMIENTO PARA CONTROLAR LAS FUNCIONES DE ELEVACION, del 8 de Septiembre de 2010, de JLG INDUSTRIES,INC.: Procedimiento para controlar los ángulos del brazo en un vehículo con brazo elevador, incluyendo el vehículo con brazo elevador un brazo de torre acoplado en forma […]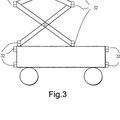 SISTEMA DE DETECCIÓN DE OBSTRUCCIONES, del 18 de Marzo de 2011, de JLG INDUSTRIES,INC.: Sistema de detección de obstrucciones adecuado para un vehículo elevador que incluye una plataforma elevadora , comprendiendo el […]
SISTEMA DE DETECCIÓN DE OBSTRUCCIONES, del 18 de Marzo de 2011, de JLG INDUSTRIES,INC.: Sistema de detección de obstrucciones adecuado para un vehículo elevador que incluye una plataforma elevadora , comprendiendo el […]