Procedimiento y sistema para manipulación y transporte de contenedores de residuos radiactivos.
Procedimiento y sistema para manipulación y transporte de contenedores (1) de residuos radiactivos.
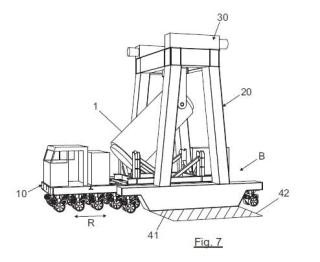
Dicho sistema comprende una plataforma de transporte (10) autopropulsada configurada para transportar un contenedor (1) en posición horizontal (H) dispuesto sobre un bastidor de carga (2), dicha plataforma (10) configurada para desplazarse desde una primera posición (A) hasta una segunda posición (B); y un pórtico de maniobras (20) autopropulsado configurado para desplazarse hasta la segunda posición (B), que dispone de medios de izado y descenso (30) del contenedor (1) y medios de asentamiento (40) configurados para asentar el pórtico de maniobras (20) sobre el suelo de la segunda posición (B); dicha plataforma de transporte (10) configurada para posicionarse debajo del pórtico de maniobras (20).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201330511.
Solicitante: COAPSA CONTROL, S.L.
Nacionalidad solicitante: España.
Inventor/es: CALATAYUD CASTAÑ,Jordi, QUINTANA CANUDAS,Joan.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66C19/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › Grúas que llevan carros de rodadura que se desplazan sobre puentes o pórticos fijos o móviles (B66C 17/00 tiene prioridad; estructura de columnas que soportan la base B66C 5/00; adaptaciones de armazones que soportan las vías de rodadura B66C 6/00; grúas de brazo horizontal de carga B66C 23/00).
- G21F5/14 FISICA. › G21 FISICA NUCLEAR; TECNICA NUCLEAR. › G21F PROTECCION CONTRA LOS RAYOS X, RAYOS GAMMA, RADIACIONES CORPUSCULARES O BOMBARDEOS DE PARTICULAS; TRATAMIENTO DE MATERIALES CONTAMINADOS POR LA RADIACTIVIDAD; DISPOSICIONES PARA LA DESCONTAMINACION (protección contra las radiaciones por medios farmacéuticos A61K 8/00, A61Q 17/04; en los vehículos espaciales B64G 1/54; asociada con un reactor G21C 11/00; asociada con un tubo de rayos X H01J 35/16; asociada con un aparato de rayos X H05G 1/02). › G21F 5/00 Recipientes blindados portátiles o transportables. › Dispositivos especialmente adaptados a la manipulación de recipientes o barriles, p. ej. dispositivos de transporte.
Fragmento de la descripción:
Campo de la invención La presente invención se refiere a un procedimiento y sistema para manipulación y transporte de contenedores de residuos radiactivos, especialmente diseñados para realizar todas las operaciones previstas en la manipulación del contenedor, desde su
recepción en la central nuclear hasta su carga al transporte de expedición, para su posterior traslado hacia el emplazamiento del A.T.C. (Almacén Temporal Centralizado) .
Antecedentes de la invención En la actualidad se conocen diversos procedimientos y sistemas para la manipulación y transporte de contenedores de residuos radiactivos.
Una primera solución se encuentra en los vehículos autopropulsados que comprenden pórticos de carga. Cada una de estos vehículos presenta un chasis en forma de U con dos brazos horizontales que se desplazan mediante un sistema de oruga o grandes ruedas, entre los que queda alojado el contenedor en posición vertical. Los brazos soportan un pórtico telescópico configurado para subir y bajar el contenedor, manteniendo siempre su posición vertical. Una vez cargado el contenedor en el pórtico del vehículo se desplaza todo el conjunto hacia la posición de destino, donde el
contenedor es descargado sobre el terreno, quedando en posición vertical.
Esta solución presenta notables inconvenientes, siendo el primero de ellos la imposibilidad de realizar un importante número de operaciones de manipulación habituales, como por ejemplo la necesidad de cargar y descargar el contenedor en posición horizontal, o voltear el mismo. Otro inconveniente a destacar es la falta de acceso a edificios que supone el transporte de cargas tan pesadas en posición vertical, y más teniendo en cuenta la considerable altura del vehículo.
Una segunda solución se encuentra en los vehículos autopropulsados que 35 comprenden plataformas de carga. Cada uno de estos vehículos presenta un chasis en forma de plataforma que se desplaza mediante un sistema de ruedas convencional. La plataforma soporta un bastidor de carga sobre el que queda alojado el contenedor en posición horizontal. Una vez cargado el contenedor en la plataforma del vehículo, con la asistencia de grúas auxiliares, se desplaza todo el conjunto hacia la posición de destino, donde el contenedor es descargado sobre el terreno, de nuevo con la asistencia de grúas auxiliares, quedando en posición horizontal.
Esta solución presenta notables inconvenientes, siendo el primero de ellos la imposibilidad de realizar un importante número de operaciones de manipulación habituales, como por ejemplo la necesidad de cargar, descargar o voltear el contenedor, sin la asistencia de elementos auxiliares cualificados de acuerdo a la normativa exigible vigente. Otro inconveniente a destacar son las elevadas cargas puntuales sobre el sistema de ruedas, que aparte del sobredimensionamiento que requiere en diseño del vehículo, dificultan y ralentizan su maniobrabilidad.
La presente invención resuelve de manera satisfactoria los problemas anteriormente expuestos, mediante un procedimiento y sistema para manipulación y transporte de contenedores de residuos radiactivos que mejora las prestaciones de los vehículos existentes y los combina eficazmente para simplificar, con el menor número de elementos, todas las operaciones previstas en la manipulación de contenedores de residuos radiactivos, desde su recepción en la central nuclear hasta su carga al transporte de expedición, para su posterior traslado hacia el emplazamiento del A.T.C. (Almacén Temporal Centralizado) . Simplifica la infraestructura necesaria en la losa de almacenamiento temporal al no requerir ningún medio de elevación fijo válido para el
manejo de contenedores de combustible irradiado.
Descripción de la invención De acuerdo a un primer objeto de la presente invención, a continuación se describe un procedimiento para manipulación y transporte de contenedores de residuos radiactivos dentro de la central nuclear. Dicho procedimiento comprende las etapas de: a.1) disponer una plataforma de transporte autopropulsada en una primera posición, dicha plataforma cargada con un contenedor en posición horizontal dispuesto sobre un bastidor de carga; b.1) desplazar la plataforma de transporte desde la primera posición hasta una segunda posición;
c.1) desplazar un pórtico de maniobras autopropulsado hasta la segunda posición,
dicho pórtico disponiendo de unos medios de izado y descenso del contenedor; d.1) asentar el pórtico de maniobras sobre el suelo de la segunda posición; y e.1) posicionar la plataforma de transporte debajo del pórtico de maniobras.
De acuerdo al procedimiento anterior, al que se denomina procedimiento base, una vez posicionados los distintos componentes del sistema se pueden se pueden llevar a cabo un gran número de operaciones.
Una de ellas consiste en posicionar el bastidor de carga sobre el suelo, estando dispuesto el contenedor en posición horizontal sobre dicho bastidor. Para ello, después de la etapa e.1) , el procedimiento base comprende las etapas de: f.1) enganchar los medios de izado y descenso al bastidor de carga; g.1) izar el bastidor de carga junto al contenedor manteniendo la posición horizontal
del mismo, hasta descargar su peso de la plataforma de transporte; h.1) retirar la plataforma de transporte del pórtico de maniobras; y i.1) descender el bastidor de carga junto al contenedor manteniendo la posición horizontal del mismo, hasta depositarlo sobre el suelo de la segunda posición.
Algunas operaciones requieren la manipulación por separado del contenedor, por ejemplo para preparar su expedición del emplazamiento de la central. Para ello, después de la etapa i.1) , el procedimiento de la presente invención comprende las etapas de: j.1) enganchar los medios de izado y descenso al contenedor;
k.1) izar el contenedor manteniendo la posición horizontal del mismo, hasta descargar su peso del bastidor de carga; l.1) colocar uno o más elementos de absorción de impactos sobre el bastidor de carga; y m.1) descender el contenedor manteniendo la posición horizontal del mismo, hasta 30 depositarlo sobre el bastidor de carga.
Como alternativa al posicionamiento del bastidor de carga sobre el suelo, estando dispuesto el contenedor en posición horizontal sobre dicho bastidor, algunas operaciones requieren el volteo del contenedor para dejarlo en posición vertical sobre 35 el suelo, aislado del bastidor. Para ello, después de la etapa e.1) , el procedimiento base comprende las etapas de: f.2) enganchar los medios de izado y descenso al contenedor; g.2) izar el contenedor provocando el volteo del mismo respecto a un eje de apoyo
del bastidor de carga, hasta adoptar una posición vertical y descargar su peso del bastidor de carga; h.2) retirar la plataforma de transporte del pórtico de maniobras; y i.2) descender el contenedor manteniendo la posición vertical del mismo, hasta depositarlo sobre el suelo de la segunda posición.
Preferentemente, durante la etapa g.2) se produce un movimiento relativo entre la plataforma de transporte y el pórtico de maniobras, sincronizándose la posición de ambos de modo que los medios de izado y descenso mantengan un enganche vertical al contenedor.
Otra alternativa al posicionamiento horizontal del conjunto bastidor de carga-contenedor sobre el suelo, o al posicionamiento vertical individualizado del contenedor sobre el suelo, es posible también cargar el contenedor sobre un nuevo bastidor de carga, dispuesto en otra plataforma de transporte, o en cualquier otro vehículo. Para ello, después de la etapa e.1) , el procedimiento base comprende las etapas de:
f.3) enganchar los medios de izado y descenso al contenedor; g.3) izar el bastidor de carga junto al contenedor manteniendo la posición horizontal
(H) del mismo, hasta descargar su peso de la plataforma de transporte; h.3) retirar la plataforma de transporte del pórtico de maniobras; i.3) posicionar un nuevo bastidor de carga debajo del pórtico de maniobras; y
j.3) descender el contenedor manteniendo la posición horizontal del mismo, hasta depositarlo sobre el nuevo bastidor de carga.
Preferentemente, para disponer una plataforma de transporte cargada con un contenedor en posición horizontal dispuesto sobre un bastidor de carga, la etapa a.1) 30 comprende las etapas de:
a.1.1. desplazar un pórtico de maniobras hasta quedar encima del contenedor en posición horizontal dispuesto sobre el bastidor de carga;
a.1.2. enganchar los medios de izado y descenso al bastidor de carga;
a.1.3. izar el bastidor de carga junto al contenedor manteniendo la posición 35 horizontal del mismo;
a.1.4. posicionar la plataforma...
Reivindicaciones:
1. Procedimiento para manipulación y transporte de contenedores de residuos radiactivos, dicho procedimiento caracterizado por que comprende las etapas de:
a.1) disponer una plataforma de transporte (10) autopropulsada en una primera posición (A) , dicha plataforma (10) cargada con un contenedor (1) en posición horizontal (H) dispuesto sobre un bastidor de carga (2) ;
b.1) desplazar la plataforma de transporte (10) desde la primera posición (A) hasta una segunda posición (B) ; 10 c.1) desplazar un pórtico de maniobras (20) autopropulsado hasta la segunda posición (B) , dicho pórtico (20) disponiendo de unos medios de izado y descenso (30) del contenedor (1) ; d.1) asentar el pórtico de maniobras (20) sobre el suelo de la segunda posición (B) ; y e.1) posicionar la plataforma de transporte (10) debajo del pórtico de maniobras (20) .
1.
2. Procedimiento para manipulación y transporte de contenedores de residuos radiactivos según la reivindicación 1 caracterizado por que después de la etapa e.1) comprende las etapas de: f.1) enganchar los medios de izado y descenso (30) al bastidor de carga (2) ;
g.1) izar el bastidor de carga (2) junto al contenedor (1) manteniendo la posición horizontal (H) del mismo, hasta descargar su peso de la plataforma de transporte (10) ;
h.1) retirar la plataforma de transporte (10) del pórtico de maniobras (20) ; y i.1) descender el bastidor de carga (2) junto al contenedor (1) manteniendo la 25 posición horizontal (H) del mismo, hasta depositarlo sobre el suelo de la segunda posición (B) .
3. Procedimiento para manipulación y transporte de contenedores de residuos radiactivos según la reivindicación 2 caracterizado por que después de la etapa i.1)
comprende las etapas de: j.1) enganchar los medios de izado y descenso (30) al contenedor (1) ; k.1) izar el contenedor (1) manteniendo la posición horizontal (H) del mismo, hasta descargar su peso del bastidor de carga (2) ; l.1) colocar uno o más elementos de absorción de impactos (4) sobre el bastidor de 35 carga (2) ; y
m.1) descender el contenedor (1) manteniendo la posición horizontal (H) del mismo, hasta depositarlo sobre el bastidor de carga (2) .
4. Procedimiento para manipulación y transporte de contenedores de residuos radiactivos según la reivindicación 1 caracterizado por que después de la etapa e.1) comprende las etapas de: f.2) enganchar los medios de izado y descenso (30) al contenedor (1) ; g.2) izar el contenedor (1) provocando el volteo del mismo respecto a un eje de apoyo (3) del bastidor de carga (2) , hasta adoptar una posición vertical (V) y
descargar su peso del bastidor de carga (2) ; h.2) retirar la plataforma de transporte (10) del pórtico de maniobras (20) ; y i.2) descender el contenedor (1) manteniendo la posición vertical (V) del mismo,
hasta depositarlo sobre el suelo de la segunda posición (B) .
5. Procedimiento para manipulación y transporte de contenedores de residuos radiactivos según la reivindicación 4 caracterizado por que durante la etapa g.2) se produce un movimiento relativo (R) entre la plataforma de transporte (10) y el pórtico de maniobras (20) , sincronizándose la posición de ambos (10, 20) de modo que los medios de izado y descenso (30) mantengan un enganche vertical al contenedor (1) .
2.
6. Procedimiento para manipulación y transporte de contenedores de residuos radiactivos según la reivindicación 1 caracterizado por que después de la etapa e.1) comprende las etapas de: f.3) enganchar los medios de izado y descenso (30) al contenedor (1) ;
g.3) izar el bastidor de carga (2) junto al contenedor (1) manteniendo la posición horizontal (H) del mismo, hasta descargar su peso de la plataforma de transporte (10) ;
h.3) retirar la plataforma de transporte (10) del pórtico de maniobras (20) ; i.3) posicionar un nuevo bastidor de carga (2) debajo del pórtico de maniobras (20) ; 30 y j.3) descender el contenedor (1) manteniendo la posición horizontal (H) del mismo, hasta depositarlo sobre el nuevo bastidor de carga (2) .
7. Procedimiento para manipulación y transporte de contenedores de residuos 35 radiactivos según cualquiera de las reivindicaciones 1 a 6 caracterizado por que la etapa a.1) comprende las etapas de:
a.1.1. desplazar un pórtico de maniobras (20) hasta quedar encima del contenedor
(1) en posición horizontal (H) dispuesto sobre el bastidor de carga (2) ;
a.1.2. enganchar los medios de izado y descenso (30) al bastidor de carga (2) ;
a.1.3. izar el bastidor de carga (2) junto al contenedor (1) manteniendo la posición horizontal (H) del mismo;
a.1.4. posicionar la plataforma de transporte (10) descargada hasta quedar debajo del pórtico de maniobras (20) ; y
a.1.5. descender el bastidor de carga (2) junto al contenedor (1) manteniendo la posición horizontal (H) del mismo, hasta cargarlo sobre la plataforma de transporte (10) .
8. Procedimiento para manipulación y transporte de contenedores de residuos radiactivos según cualquiera de las reivindicaciones 1 a 7 caracterizado por que la 15 etapa d.1) comprende la etapa de:
d.1.1. bajar el pórtico de maniobras (20) , variando la altura respecto del suelo de unos conjuntos extremos de ruedas (25) dispuestos entre unas bases de asentamiento (41) de base plana que se prolongan inferiormente de unos testeros inferiores (23) de dicho pórtico de maniobras (20) , hasta que dichas bases de asentamiento (41) quedan apoyadas sobre el suelo de la segunda posición (B) .
9. Procedimiento para manipulación y transporte de contenedores de residuos radiactivos según la reivindicación 8 caracterizado por que antes de la etapa d.1.1 25 comprende la etapa de:
d.1.0 colocar una o más planchas (42) de elastómero de poliuretano bajo las bases de asentamiento (41) para absorber las irregularidades del suelo de la segunda posición (B) .
10. Sistema para manipulación y transporte de contenedores de residuos radiactivos, dicho sistema caracterizado por que comprende:
• una plataforma de transporte (10) autopropulsada configurada para transportar un contenedor (1) en posición horizontal (H) dispuesto sobre un bastidor de carga (2) , dicha plataforma (10) configurada para desplazarse desde una primera posición (A)
hasta una segunda posición (B) ; y
• un pórtico de maniobras (20) autopropulsado configurado para desplazarse hasta la segunda posición (B) que dispone de: -medios de izado y descenso (30) del contenedor (1) ; y -medios de asentamiento (40) configurados para asentar el pórtico de maniobras (20) sobre el suelo de la segunda posición (B) ; dicha plataforma de transporte (10) configurada para posicionarse debajo del pórtico de maniobras (20) .
11. Sistema para manipulación y transporte de contenedores de residuos radiactivos 10 según la reivindicación 10 caracterizado por que la plataforma de transporte (10) comprende:
• una estructura portante (11) configurada para soportar el bastidor de carga (2) y el contenedor (1) , sobre la que se dispone además de una cabina de equipos de control (12) ;
• una pluralidad de conjuntos de ruedas (13) dispuestos de forma espaciada bajo la estructura portante (11) para repartir la carga, donde cada conjunto de ruedas (13) se encuentra configurado para girar independientemente del resto y variar su altura respecto del suelo; y
• unos primeros medios de autopropulsión (14) .
2.
12. Sistema para manipulación y transporte de contenedores de residuos radiactivos según cualquiera de las reivindicaciones 10 a 11 caracterizado por que el pórtico de maniobras (20) comprende:
• una estructura formada por dos pares de patas (21) , entre los se define una abertura de paso (22) configurada para alojar la plataforma de transporte (10) , cada par de patas (21) unido inferiormente a un testero inferior (23) ;
• un estructura en forma de cuadrilátero (24) que une superiormente los dos pares de patas (21) ;
• unos conjuntos extremos de ruedas (25) dispuestos bajo los testeros inferiores (23) ,
donde cada conjunto extremo de ruedas (25) se encuentra configurado para girar independientemente del resto y variar su altura respecto del suelo; y
• unos segundos medios de autopropulsión (26) .
13. Sistema para manipulación y transporte de contenedores de residuos radiactivos 35 según cualquiera de las reivindicaciones 10 a 12 caracterizado por que los medios de izado y descenso (30) comprenden:
• una pluralidad de cables o brazos (31) desplazables en altura con enganches inferiores (32) configurados para engancharse al bastidor del carga (2) y al contenedor (1) ; y
• un mecanismo motorizado (33) configurado para izar o descender dichos cables o brazos (31) .
14. Sistema para manipulación y transporte de contenedores de residuos radiactivos según cualquiera de las reivindicaciones 10 a 13 caracterizado por que los medios 10 de asentamiento (40) comprenden:
• una base de asentamiento (41) de base plana que se prolonga inferiormente de cada uno de los testeros inferiores (23) , quedando cada base de asentamiento (41) dispuesta entre conjuntos extremos de ruedas (25) .
H
1H
Fig. 2
Fig. 3
12
1
Fig. 4
H
Fig. 5
13 10% 33
21
Fig. 6
22 25
30
20
1
B
10 42
R
41
Fig. 7
V
12 14 3
2
10
13
Fig. 8
Fig. 9
Fig. 10
Fig. 11
Fig. 12
Patentes similares o relacionadas:
Vehículo auxiliar para la ejecución de un tramo de vía., del 29 de Junio de 2020, de FERROVIAL AGROMAN, S.A.: 1. Vehículo auxiliar para la ejecución de un tramo de vía, caracterizado por que comprende: - una superficie soporte destinada a estar […]
Sistema de cabrestante de elevación, del 25 de Marzo de 2020, de Liebherr-Components Biberach GmbH: Sistema de cabrestante de elevación con al menos dos tambores que pueden accionarse acoplados entre sí por al menos dos motores mediante al menos una disposición […]
Pórtico de manipulación y sistema de manipulación que comprende un pórtico de este tipo, del 4 de Marzo de 2020, de LOHR INDUSTRIE: Pórtico de manipulación para la manipulación de cargas, definido por que comprende: - al menos una viga horizontal de eje longitudinal (2a), que incluye en cada uno […]
Procedimiento y dispositivo para el almacenamiento y recuperación o reubicación de contenedores en almacenes de gran altura, del 4 de Marzo de 2020, de AMOVA GmbH: Procedimiento para almacenar y recuperar o reubicar contenedores en almacenes de gran altura de una instalación de transbordo, […]
Grúa "Backpack transtainer", del 13 de Febrero de 2020, de BARBERÁ MAYOR, Juan Carlos: El propósito de la invención de este proceso es aumentar el rendimiento de las terminales portuarias en la transferencia de contenedores […]
Carretillas pórtico para el uso en terminales de contenedores y para otras finalidades de transporte, del 1 de Enero de 2020, de Pfenning Elektroanlagen GmbH: Carretilla pórtico para el uso en terminales de contenedores y para otras finalidades de transporte, con un bastidor , un dispositivo de elevación , que cuelga […]
Flujo de video modificado para soportar el control remoto de una grúa de contenedores, del 18 de Diciembre de 2019, de ABB SCHWEIZ AG: Un procedimiento para soportar el control remoto de una grúa de contenedores , estando configurada la grúa de contenedores para desplazar contenedores de una posición […]
Control de grúa automatizado teniendo en cuenta errores de medición que dependen del objeto de carga y de la posición, del 5 de Noviembre de 2019, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento de control para un sistema de transbordo que comprende una grúa pórtico para contenedores dispuesta sobre un suelo con un carro […]