14 inventos, patentes y modelos de MEGGLE,MARTIN
Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino.
(29/07/2020) Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o varios sensores de luz (6 a 8), caracterizado por que están previstos un elemento de preamplificación , un elemento detector sensible a la fase y un elemento de control central , por que se comprueba una señal suministrada por el sensor de luz (6 a 8) en cuanto a un patrón de señal prefijado por el elemento de control central y por que se relaciona esta señal, a efectos de realizar un control del aparato , con la orientación del respectivo sensor de luz (6 a 8), en caso de que estén dispuestos varios sensores de luz (6 a 8), o con la orientación…
Aparato de limpieza por aspiración así como procedimiento para el funcionamiento de un aparato de limpieza por aspiración.
Sección de la CIP Necesidades corrientes de la vida
(26/06/2019). Ver ilustración. Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Clasificación: A47L9/28, A47L9/12.
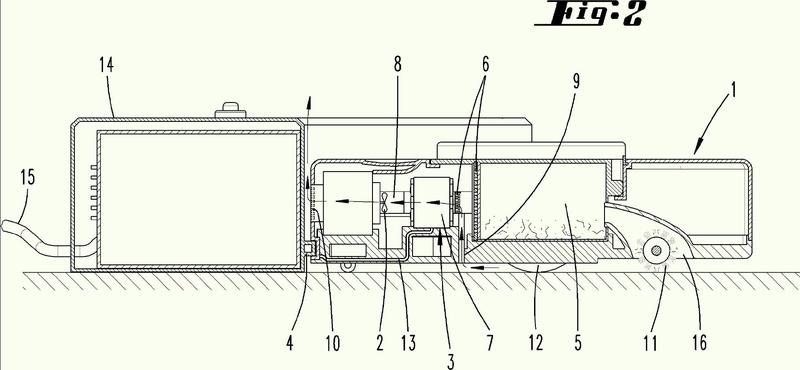
Procedimiento para hacer funcionar un aparato de limpieza por aspiración , en particular un robot de aspiración, eliminándose durante una operación de aspiración material de aspiración por medio de un ventilador del aparato de limpieza por aspiración de una superficie que va a limpiarse y haciéndose funcionar el ventilador por medio de un acumulador , enfriándose el acumulador durante una operación de carga del acumulador por un flujo de aire generado por el ventilador , caracterizado por que en una operación de carga del acumulador con respecto al sentido de flujo del flujo de aire transportado por el ventilador se abre una abertura de aire secundario dispuesta delante del acumulador , de modo que el acumulador se enfría por el aire secundario que entra a través de la abertura de aire secundario en el aparato de limpieza por aspiración.
PDF original: ES-2745212_T3.pdf
Dispositivo de limpieza en húmedo, en especial dispositivo de limpieza de ventanas.
Sección de la CIP Necesidades corrientes de la vida
(26/06/2019). Ver ilustración. Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Clasificación: A47L1/08, A47L13/26, A47L13/12.
Dispositivo de limpieza en húmedo , especialmente dispositivo de limpieza de ventanas, con una superficie de limpieza fundamentalmente rectangular configurada al mismo tiempo para la aplicación de humedad y con una zona de sujeción para agarrar con la mano así como con un orificio de aspiración alargado, configurándose la zona de sujeción de forma rígida con la superficie de limpieza y extendiéndose el orificio de aspiración a lo largo de un canto del borde longitudinal de la superficie de limpieza , orientándose además una dirección de extensión de la zona de sujeción en un desarrollo del orificio de aspiración , caracterizado por que la zona de sujeción se configura en superposición vertical respecto a la superficie de limpieza.
PDF original: ES-2745270_T3.pdf
Procedimiento de tratamiento de un suelo.
(12/06/2019) Procedimiento de tratamiento, especialmente limpieza, de un suelo de una habitación por medio de un aparato de tratamiento automáticamente desplazable , en el que se confecciona un mapa de la habitación y se visualiza este mapa para un usuario del aparato de tratamiento , en el que el usuario puede seleccionar en el mapa confeccionado al menos una zona parcial de la habitación en la que el aparato de tratamiento deba realizar u omitir un tratamiento del suelo , en el que se confecciona el mapa de la habitación a partir de coordenadas tridimensionales de un sistema de coordenadas mundiales y en el que se asigna una coordenada tridimensional dentro del sistema de coordenadas mundiales a cada punto de una multiplicidad de puntos de la habitación y/o de un obstáculo dispuesto en la habitación, caracterizado por que se visualiza el…
Aparato de desplazamiento automático así como procedimiento para la orientación de un aparato de este tipo.
Sección de la CIP Física
(08/05/2019). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Clasificación: G05D1/02.
Procedimiento para la orientación de un aparato de desplazamiento automático , en particular de un aparato de limpieza para la limpieza de un suelo como un robot para aspirar y/o barrer, llevando a cabo el aparato al menos automáticamente un mapeo de un área completa (G) por ejemplo mediante una medición de distancias en todas las direcciones, llevando a cabo el aparato al mismo tiempo durante el mapeo del área completa o después una subdivisión automática del área completa (G) en subáreas (T1 a T8), llevándose a cabo la subdivisión en subáreas con respecto a diferentes recubrimientos de suelo (B1 a B5), caracterizado por que se juntan y almacenan las áreas contiguas con la misma rugosidad y/u orientación del pelo en una subárea.
PDF original: ES-2729749_T3.pdf
Procedimiento para la localización y el modelado simultáneos de mapas.
(27/03/2019) Procedimiento para la localización y el modelado simultáneos de mapas para la auto-localización de un aparato de desplazamiento automático, especialmente de un aparato de recogida de polvo del suelo que se desplaza automáticamente, con ruedas de desplazamiento accionadas preferiblemente por medio de un motor eléctrico, estando el aparato provisto de un dispositivo de detección de obstáculos (H) compuesto por unidades ópticas de emisión y de recepción, calculándose además una pluralidad de posibles posiciones , es decir, de posiciones y orientaciones, partiendo de una primera posición supuesta previamente calculada del aparato y considerándose,…
Aparato de limpieza de suelos en seco y en húmedo, así como procedimiento de funcionamiento de un aparato automóvil de limpieza de suelos.
Sección de la CIP Necesidades corrientes de la vida
(19/12/2018). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Clasificación: A47L11/40, A47L9/28, A47L11/14, A47L11/10, A47L11/20.
Procedimiento de funcionamiento de un aparato automóvil de limpieza de suelos, en el que el aparato de limpieza de suelos recorre en una primera fase de trabajo un primer camino de tratamiento (11, 12, 13, 14, 15, 16, 16', 17) sobre el suelo (1, 2, 3, 4, 5, 6, 6', 7) a limpiar según una estrategia de desplazamiento prefijada o según un algoritmo prefijado en base a una estrategia de desplazamiento calculada por datos registrados con sensores , y realiza entonces una primera fase de limpieza con un primer equipo de limpieza , caracterizado por que en la primera fase de trabajo se registran zonas de las superficies de suelo (1, 2, 3, 4, 5, 6, 6', 7) a limpiar que se limpian en al menos una segunda fase de trabajo con un segundo equipo de limpieza o que se excluyen de la limpieza con el segundo equipo de limpieza.
PDF original: ES-2703910_T3.pdf
Aparato de cocina accionado con motor eléctrico.
Sección de la CIP Necesidades corrientes de la vida
(09/05/2018). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Clasificación: A47J43/07.
Aparato de cocina accionado con motor eléctrico con un recipiente de agitación y un mecanismo de agitación , en el que se puede ajustar el aparato de cocina de manera específica del usuario, en el que, además, está prevista una pieza de mando manejable manualmente. por ejemplo para el ajuste de un número de revoluciones deseado, en el que, además, la pieza de mando está formada como elemento desmontable desde el aparato de cocina , caracterizado por que la pieza de mando presenta una memoria de datos y una interfaz de datos , para la lectura en el lado del aparato de los datos contenidos en la memoria de datos , en el que por medio de los datos se puede establecer un ajuste específico del usuario y por que la pieza de mando es un regulador giratorio.
PDF original: ES-2673404_T3.pdf
Procedimiento de funcionamiento de un aspirador de polvo, así como aspirador de polvo accionado por motor eléctrico y reserva de material filtrante de forma de tubo flexible.
Sección de la CIP Necesidades corrientes de la vida
(01/11/2017). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Clasificación: A47L9/14.
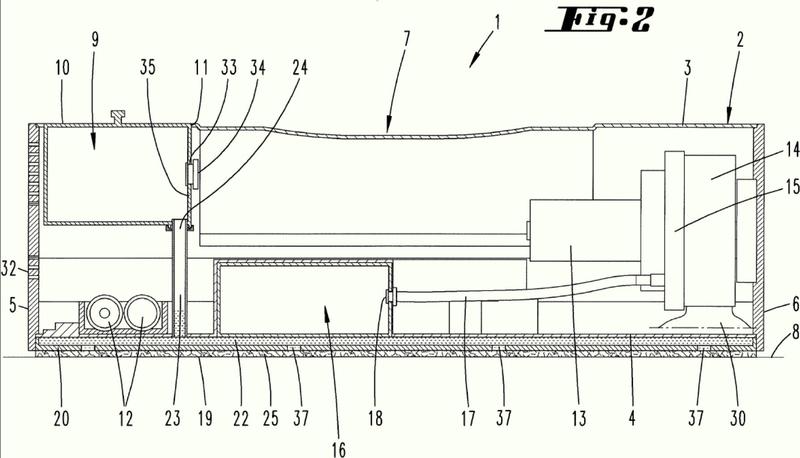
Procedimiento de funcionamiento de un aspirador de polvo que comprende un soplante de aspiración y un racor de aspiración o de soplado que conduce a una primera bolsa filtro de polvo , en el que una pluralidad de bolsas filtro de polvo o un material filtrante para formar una pluralidad de bolsas filtro de polvo se almacenan en el aspirador de polvo y con la extracción de una bolsa filtro de polvo llena se pone en marcha un movimiento de avance del material filtrante para formar otra bolsa filtro de polvo o un movimiento de avance de una bolsa filtro de polvo , caracterizado por que la situación de disponibilidad para el movimiento de avance de una bolsa filtro de polvo o del material filtrante para formar una bolsa filtro de polvo se habilita de manera controlada en el tiempo, se habilita manera controlada por aumento de presión o por disminución de presión o se realiza en función de una medición de flujo.
PDF original: ES-2658098_T3.pdf
PDF original: ES-2658098_T9.pdf
Procedimiento de funcionamiento de un aspirador de polvo, así como aspirador de polvo accionado por motor eléctrico y reserva de material filtrante de forma de tubo flexible.
Sección de la CIP Necesidades corrientes de la vida
(19/10/2016). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Clasificación: A47L9/14.
Procedimiento de funcionamiento de un aspirador de polvo que comprende un soplante de aspiración y un racor de aspiración o de soplado que conduce a una primera bolsa filtro de polvo , en el que una pluralidad de bolsas filtro de polvo o un material filtrante para formar una pluralidad de bolsas filtro de polvo se almacenan en el aspirador de polvo y con la extracción de una bolsa filtro de polvo llena se pone en marcha un movimiento de avance del material filtrante para formar otra bolsa filtro de polvo o un movimiento de avance de una bolsa filtro de polvo , caracterizado por que el movimiento de avance de la otra bolsa filtro de polvo o del material filtrante se realiza automáticamente de manera controlada por sobrepresión o por depresión.
PDF original: ES-2608702_T3.pdf
Máquina de cocina accionada con motor eléctrico.
Sección de la CIP Necesidades corrientes de la vida
(24/08/2016). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Clasificación: A47J43/046.
Máquina de cocina accionada con motor eléctrico con un recipiente de agitación (4, 4') y un mecanismo de agitación en el recipiente de agitación , y con un conjunto de refrigeración accionado eléctricamente, en la que el conjunto de refrigeración está alojado en el recipiente de agitación (4') y separado del conjunto de refrigeración en el recipiente de agitación (4') está configurada una zona de preparación , en la que se puede disponer una pieza de agitación accionada por el mecanismo de agitación , caracterizada por que el conjunto de refrigeración presenta una pieza de retención que se puede colocar a modo de una tapa sobre el recipiente de agitación (4, 4') y por que un compresor y/o el motor eléctrico del conjunto de refrigeración están alojados en una parte de la carcasa configurada en el lado superior de la pieza de retención , dado el caso en el lado superior de un lado superior del recipiente de agitación que sirve como superficie de llenado.
PDF original: ES-2602302_T3.pdf
Estación base para un aspirador de polvo.
(22/06/2016) Estación base para limpiar y/o vaciar un compartimiento de polvo de un primer aspirador de polvo , cuya estación base presenta una cámara de polvo base , una primera entrada en unión de flujo con la cámara de polvo base y una primera salida de aire en unión de flujo con la cámara de polvo base , en la que la entrada de aire y la salida de aire pueden unirse reotécnicamente con un canal de aire del primer aspirador de polvo de modo que el polvo contenido en el compartimiento de polvo del primer aspirador de polvo pueda ser transportado hasta la cámara de polvo base por medio de un soplante del primer aspirador de polvo , en la que…
Procedimiento para la limpieza o el tratamiento de una habitación por medio de un aparato autodesplazable.
(27/01/2016) Procedimiento para la limpieza o el tratamiento de una habitación por medio de un aparato autodesplazable , con los pasos de
- creación de un mapa de la habitación,
- almacenamiento del mapa de la habitación dentro de una memoria de datos,
- selección de una zona parcial de la habitación mediante la toma de una foto de la zona parcial por un usuario,
- transmisión de los datos locales de la zona parcial seleccionada a un ordenador conectado a la memoria de datos,
- comparación de los datos locales de la zona parcial seleccionada con los datos locales contenidos en el mapa para la identificación de la zona parcial por medio del ordenador y
- limpieza o tratamiento de la habitación…
(25/09/2013) Robot de cocina con un recipiente agitador y un mecanismo agitador que se encuentra en el recipienteagitador , en el que el recipiente agitador puede ser calentado y en el robot de cocina está almacenada unapluralidad de recetas, caracterizado por que el robot de cocina presenta un sensor de movimiento y por que elrobot de cocina está dispuesto de manera que cuando se mueve el robot de cocina aparece una receta comopropuesta.
{kind=link}
{kind=link}