6 inventos, patentes y modelos de KHLIFI,RACHID
Procedimiento para determinar una información de posición transversal de un vehículo a motor en una calzada y vehículo a motor.
(13/03/2019) Procedimiento para determinar una información de posición transversal de un vehículo a motor sobre una calzada , caracterizado por que los datos que describen al menos una parte de la calzada son registrados con al menos un sensor de radar del vehículo a motor , a través de la evaluación en los datos de radar se detectan y localizan características del entorno que describen la ubicación de un límite de la calzada, en base a las mismas se determinan un curso de los límites de la calzada, de la calzada , y distancias laterales del vehículo a motor con respecto a los límites de la calzada, y la información de posición transversal se determina como aquella, o en función de las distancias laterales del vehículo a motor con respecto a los límites de la calzada, en donde como, al menos, un sensor de…
Procedimiento para hacer funcionar un sistema de asistencia al conductor para el apoyo de al menos una persona fuera de un vehículo motorizado.
Sección de la CIP Técnicas industriales diversas y transportes
(20/11/2018). Solicitante/s: AUDI AG. Clasificación: B60R25/24, B60R16/037.
Procedimiento para hacer funcionar un sistema de asistencia al conductor para la ayuda de al menos una persona fuera de un vehículo motorizado mediante el control de al menos un sistema de vehículo para llevar a cabo al menos una medida, presentando el vehículo motorizado al menos un radar sensor , caracterizado por que al detectarse mediante un dispositivo de comunicación del vehículo motorizado en un área de comunicación del vehículo motorizado un dispositivo móvil predeterminado asignado al vehículo motorizado , se activa el al menos un radar sensor , por lo que mediante la evaluación de los datos de radar se determinan datos de evaluación completos respecto de al menos una información de posición de al menos una persona en el entorno del vehículo motorizado , siendo llevado a cabo, después de cumplir un criterio de medidas que evalúa los datos de evaluación, al menos una medida asignada al criterio de medidas para ayudar a la persona.
PDF original: ES-2690294_T3.pdf
Procedimiento para el funcionamiento de un sensor de radar en un automóvil, sensor de radar y automóvil.
Sección de la CIP Física
(09/11/2016). Solicitante/s: AUDI AG. Clasificación: G01S13/93, G01S13/89, G01S13/86, G01S13/72, G01S7/41.
Procedimiento para el funcionamiento de un sensor de radar utilizado para la percepción del entorno para un automóvil , en el que para al menos un trayecto recorrido por el automóvil se calculan datos de referencia que describen características estáticas perceptibles a través del sensor de radar , teniendo en cuenta datos de radar registrados a lo largo del trayecto y se registran dentro del sensor de radar , caracterizado por que en el caso de un recorrido nuevo de al menos una sección de un trayecto, para el que se han registrado datos de referencia, se realiza con gasto reducido la evaluación de datos de radar registrado actualmente teniendo en cuenta los datos de referencia.
PDF original: ES-2651339_T3.pdf
Sensor de radar para un vehículo automóvil, vehículo automóvil y procedimiento de comunicación.
(05/10/2016) Sensor de radar para un vehículo automóvil que comprende al menos una disposición de antenas para emitir y recibir señales de radar y un equipo de control concebido para controlar el funcionamiento de la disposición de antenas y para evaluar las señales de radar recibidas, en donde la disposición de antenas puede ser hecha funcionar también por el equipo de control para emitir y/o recibir mensajes en el marco de una comunicación de vehículo automóvil a vehículo automóvil, en donde la disposición de antenas presenta al menos una antena de emisión y al menos una antena de recepción , y en donde la antena de emisión puede ser activada en alternancia cíclica con la emisión de señales de radar para emitir mensajes, caracterizado…
Procedimiento para el funcionamiento de un sistema de asistencia al conductor de un vehículo automóvil y vehículo automóvil.
Sección de la CIP Física
(20/07/2016). Solicitante/s: AUDI AG. Clasificación: G01S13/93, G01S13/89, G01S13/87, G01S7/41.
Procedimiento para el funcionamiento de un sistema de asistencia al conductor de un vehículo automóvil , evaluándose datos de sensor de al menos un sensor de radar del vehículo automóvil dirigido al entorno del vehículo automóvil para determinar un recorrido de un límite de la carretera de una carretera recorrida por el vehículo automóvil , en el que en el caso de cumplir al menos un criterio de medidas el cual indica un peligro del vehículo automóvil , en particular de neumáticos y/o llantas, por la naturaleza del límite de la carretera, se introduce una medida para advertir al conductor y/o para reducir el peligro mediante una intervención en la marcha, caracterizado por que se utiliza un criterio de medidas que evalúa el recorrido del límite de la carretera en un plano vertical, comparándose un valor de la nitidez de los cantos, el cual describe la nitidez de cantos que aparecen en el recorrido, con un valor umbral de la nitidez.
PDF original: ES-2641586_T3.pdf
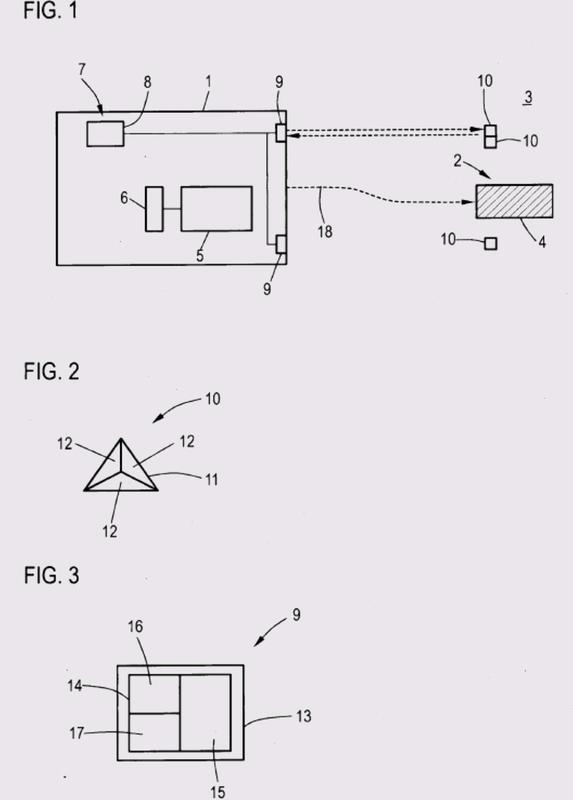
Procedimiento para operación de un sistema de asistencia al conductor de un automóvil para situar de manera óptima el automóvil respecto de un dispositivo de carga inalámbrico y a un automóvil.
Secciones de la CIP Física Técnicas industriales diversas y transportes
(13/01/2016). Ver ilustración. Solicitante/s: AUDI AG. Clasificación: G01S13/93, G01S13/02, B60W30/06.
Procedimiento para operar un sistema de asistencia al conductor de un automóvil para situar de manera óptima el automóvil respecto de un dispositivo de carga inalámbrico para un acumulador de energía eléctrica del automóvil , caracterizado por que por medio de la valoración de los datos de sensor de como minimo un sensor de radar se determina una posición de como minimo un marcador de radar que refleja como fuente puntual , que está situado en relación geométrica fija respecto del dispositivo de carga y por tanto se determina una posición relativa del automóvil respecto del dispositivo de carga , se determina una trayectoria que conduce a una posición final óptima predeterminada del automóvil con relación al dispositivo de carga , y se entrega a un conductor especialmente en forma de instrucciones de marcha y/o se realiza por actuaciones de marcha automáticas.
PDF original: ES-2640628_T9.pdf
PDF original: ES-2640628_T3.pdf
{kind=link}