Bloque, panel y sistema para electrodeposición 3D.
Secciones de la CIP Química y metalurgia Técnicas industriales diversas y transportes
(17/01/2020). Solicitante/s: HERNANDEZ JUANPERA, Jesus. Clasificación: C25D5/02, B82Y40/00, B33Y30/00.
Sistema para de electrodeposición 3D que comprende un panel a modo de electrodo de una celda electrolítica, el panel comprendiendo una matriz bidimensional de bloques configurados para recibir material electrodepositado, donde cada bloque comprende al menos dos estructuras de diodo y un pixel-electrodo en contacto eléctrico por una parte con el polo positivo de una de las estructuras de diodo y por otra parte con el polo negativo de la otra estructura de diodo.
PDF original: ES-2738026_A1.pdf
Instrumento quirúrgico laparoscópico.
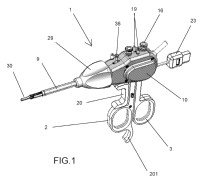
(28/05/2019) 1. Instrumento quirúrgico laparoscópico que comprende:
una región de agarre manual provista de dos elementos de agarre movibles articulados para realizar cada uno de ellos un movimiento angular, configurados de alojar un dedo del usuario
una herramienta de trabajo provista de dos mordazas articuladas entre sí por un eje pivotante , manipulables por medio de la región de agarre,
un mecanismo accionador capaz de transmitir el movimiento desde la región de agarre a la herramienta de trabajo , en el que el mecanismo accionador comprende dos varillas de empuje , en el que el extremo distal de cada una de las varillas de empuje está acoplado de forma articulada a una correspondiente…
HERRAMIENTA Y DISPOSITIVO DE AGARRE PROVISTO DE TAL HERRAMIENTA.
Sección de la CIP Necesidades corrientes de la vida
(22/10/2015). Ver ilustración. Solicitante/s: SERVOCAD MICROTRONICS, S.L. Clasificación: A61B17/29.
Herramienta que comprende un par de mordazas que interactúan entre sí mediante unos medios de accionamiento que comprenden una parte central fija y dos pletinas de leva , dispuestas de forma enfrentada a ambos laterales de la parte central fija, las cuales son deslizables sobre dicha parte central fija, estando las dos pletinas de leva asociadas a un eje de accionamiento de desplazamiento lineal, y en el que las mordazas están acopladas a la parte central fija y a las dos pletinas de leva . De este modo, en una condición de avance hacia delante de las pletinas de leva provocan un movimiento lineal de alejamiento de una mordaza con respecto a la otra, mientras que en una condición de retroceso hacia atrás de las pletinas de leva provocan un movimiento lineal de acercamiento de una de las mordazas con respecto a la otra.
Herramienta y dispositivo de agarre provisto de tal herramienta.
(03/02/2015) Herramienta que comprende un par de mordazas que interactúan entre sí mediante unos medios de accionamiento que comprenden una parte central fija y dos pletinas de leva , dispuestas de forma enfrentada a ambos laterales de la parte central fija, las cuales son deslizables sobre dicha parte central fija, estando las dos pletinas de leva asociadas a un eje de accionamiento de desplazamiento lineal, y en el que las mordazas están acopladas a la parte central fija y a las dos pletinas de leva . De este modo, en una condición de avance hacia delante de las pletinas de leva provocan un movimiento lineal de alejamiento de una mordaza con respecto a la otra, mientras que en una condición de retroceso hacia atrás…
Sección de la CIP Necesidades corrientes de la vida
(27/03/2014). Ver ilustración. Solicitante/s: SERVOCAD MICROTRONICS, S.L. Clasificación: A61C8/00, A61C13/12.
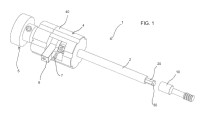
Herramienta mecánica, en particular para la manipulación de objetos de dimensiones reducidas, que comprende un primer eje alargado interiormente hueco provisto en su extremo libre de una terminación geométrica determinada acoplable en una región del objeto a manipular y un segundo eje alargado que transcurre a lo largo del interior del primer eje alargado que presenta en su extremo libre una terminación geométrica determinada, que sobresale exteriormente con respecto al primer eje alargado, acoplable en una segunda región del objeto a manipular, siendo uno de los dos ejes alargados capaz de girar sobre su propio eje longitudinal central respecto al otro eje alargado, incluyendo unos medios de accionamiento para efectuar tal acción de giro.
INSTRUMENTO QUIRÚRGICO LAPAROSCÓPICO.
Sección de la CIP Necesidades corrientes de la vida
(31/10/2013). Ver ilustración. Solicitante/s: SERVOCAD MICROTRONICS, S.L. Clasificación: A61B17/29.
Instrumento quirúrgico laparoscópico de funcionamiento completamente mecánico, que puede ser previsto para ser desechado tras un solo uso o bien esterilizable para su reutilización en más de una ocasión, que comprende esencialmente una zona de agarre provista de dos elementos de agarre articulados entre sí por un eje pivotante , una herramienta de trabajo provista de dos mordazas articuladas entre sí por un eje pivotante, y un mecanismo de accionamiento capaz de transmitir el movimiento desde la zona de agarre a la herramienta de trabajo , en el que dicha herramienta puede adoptar múltiples posiciones y/o orientaciones durante su utilización por medio de la ayuda de cuerpos sensiblemente anulares acoplados a bielas asociadas a los elementos de agarre.
(09/10/2012) 1. Herramienta mecánica, en particular para la manipulación de objetos de dimensiones reducidas, caracterizada por el hecho de que comprende un primer eje alargado interiormente hueco provisto en su extremo libre de una terminación geométrica determinada acoplable en una región del objeto a manipular y un segundo eje alargado que transcurre a lo largo del interior del primer eje alargado que presenta en su extremo libre una terminación geométrica determinada, que sobresale exteriormente con respecto al primer eje alargado, acoplable en una segunda región del objeto a manipular, siendo uno de los dos ejes alargados capaz de girar sobre su propio eje longitudinal central respecto al otro eje alargado, incluyendo unos medios de accionamiento para efectuar tal acción de giro.
2. Herramienta mecánica según la…
Instrumento quirúrgico laparoscópico.
(26/07/2012) Instrumento quirúrgico laparoscópico de funcionamiento completamente mecánico, que puede ser previsto para ser desechado tras un solo uso o bien esterilizable para su reutilización en más de una ocasión, que comprende esencialmente una zona de agarre provista de dos elementos de agarre articulados entre sí por un eje pivotante , una herramienta de trabajo provista de dos mordazas articuladas entre sí por un eje pivotante, y un mecanismo de accionamiento capaz de transmitir el movimiento desde la zona de agarre a la herramienta de trabajo , en el que dicha herramienta puede adoptar múltiples posiciones y/o orientaciones…
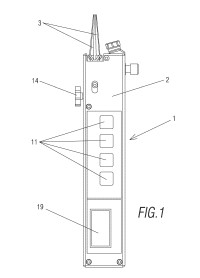
DISPOSITIVO PORTABLE AUTÓNOMO, EN ESPECIAL APLICABLE EN CIRUGÍA, MANIPULACIÓN DE MICRO-COMPONENTES Y SIMILARES.
(13/07/2012) Dispositivo portable autónomo , en especial aplicable en cirugía, manipulación de micro-componentes y similares, comprendiendo una micro-herramienta de trabajo acoplable de forma extraíble a una carcasa principal , y medios de accionamiento para manipular la micro-herramienta de trabajo asociados a servomotores, cuyos medios de accionamiento comprenden un primer actuador asociado a un primer servomotor permitiendo un grado de libertad rotacional de la micro-herramienta de trabajo ; un segundo actuador asociado a un segundo servomotor, vinculado al primer actuador para un desplazamiento de translación de la micro-herramienta de trabajo hacia delante-detrás; y un tercer actuador asociado a un tercer servomotor que realiza un movimiento oscilante de la micro-herramienta…
DISPOSITIVO PORTABLE AUTÓNOMO, EN ESPECIAL, APLICABLE A CIRUGÍA, MANIPULACIÓN DE MICRO-COMPONENTES Y SIMILARES.
(21/06/2012) Dispositivo portable autónomo , en especial aplicable en cirugía, manipulación de micro-componentes y similares, comprendiendo una micro-herramienta de trabajo acoplable de forma extraíble a una carcasa principal , y medios de accionamiento para manipular la micro-herramienta de trabajo asociados a servomotores, cuyos medios de accionamiento comprenden un primer actuador asociado a un primer servomotor permitiendo un grado de libertad rotacional de la micro-herramienta de trabajo ; un segundo actuador asociado a un segundo servomotor, vinculado al primer actuador para un desplazamiento de translación de la micro-herramienta de trabajo hacia delante-detrás; y un tercer actuador asociado a un tercer servomotor que realiza un movimiento oscilante de la micro-herramienta de trabajo respecto…
{kind=link}
{kind=link}
{kind=link}