380 patentes, modelos y diseños de VORWERK & CO. INTERHOLDING GMBH (pag. 5)
Procedimiento de desconexión definida por el usuario de una máquina de cocina eléctrica y máquina de cocina eléctricamente accionada.
Sección de la CIP Necesidades corrientes de la vida
(22/06/2016). Inventor/es: CALDEWEY, UWE, KEMKER, UWE, BRECH,OLIVER, LANG,TORSTEN, SCHOMACHER,JUTTA. Clasificación: A47J43/07, A47J27/00.
Procedimiento de desconexión definida por el usuario de una máquina de cocina eléctrica , en el que se tiene que introducir un código para realizar la desconexión y la máquina de cocina presenta una pantalla y unos interruptores mecánicamente accionables, tales como interruptores giratorios o pulsadores (13 a 17), caracterizado por que el código tiene que introducirse utilizando tanto la pantalla táctil como uno o varios interruptores, cumpliéndose que la máquina de cocina en su totalidad o un motor de la máquina de cocina pueden ser desactivados con independencia del perfil de usuario elegido por el código introducido.
PDF original: ES-2582081_T3.pdf
Estación base para un aspirador de polvo.
(22/06/2016) Estación base para limpiar y/o vaciar un compartimiento de polvo de un primer aspirador de polvo , cuya estación base presenta una cámara de polvo base , una primera entrada en unión de flujo con la cámara de polvo base y una primera salida de aire en unión de flujo con la cámara de polvo base , en la que la entrada de aire y la salida de aire pueden unirse reotécnicamente con un canal de aire del primer aspirador de polvo de modo que el polvo contenido en el compartimiento de polvo del primer aspirador de polvo pueda ser transportado hasta la cámara de polvo base por medio de un soplante del primer aspirador de polvo , en la que…
Máquina de cocina eléctricamente accionada.
(15/06/2016) Máquina de cocina eléctricamente accionada con un vaso de cocinado y una tapa para el vaso de cocinado , en la que la tapa puede ser bloqueada contra el vaso de cocinado en la posición de cierre, en la que el vaso de cocinado presenta también un fondo de dicho vaso y una pared de dicho vaso que se extiende desde el fondo hacia arriba, en la que la pared del vaso de cocinado hace transición a un borde de dicho vaso que se proyecta radialmente en voladizo, en la que la tapa presenta también un borde que en la posición de cierre coincide con el borde del vaso de cocinado, y en la que el bloqueo está formado también por una pieza de bloqueo que actúa sobre la tapa , caracterizada por que está prevista una pieza basculante accionable por motor…
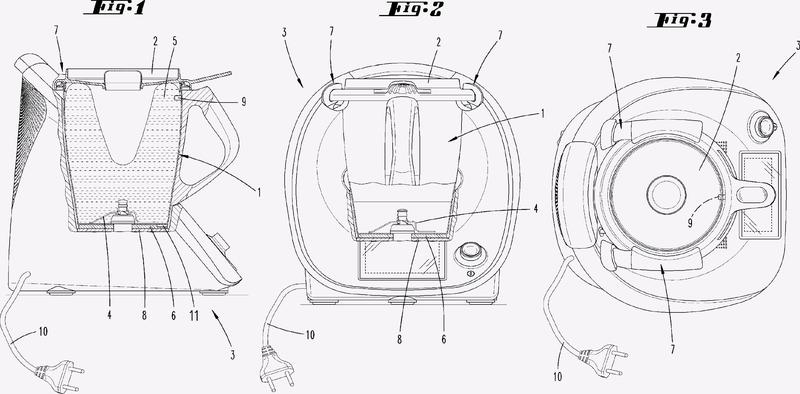
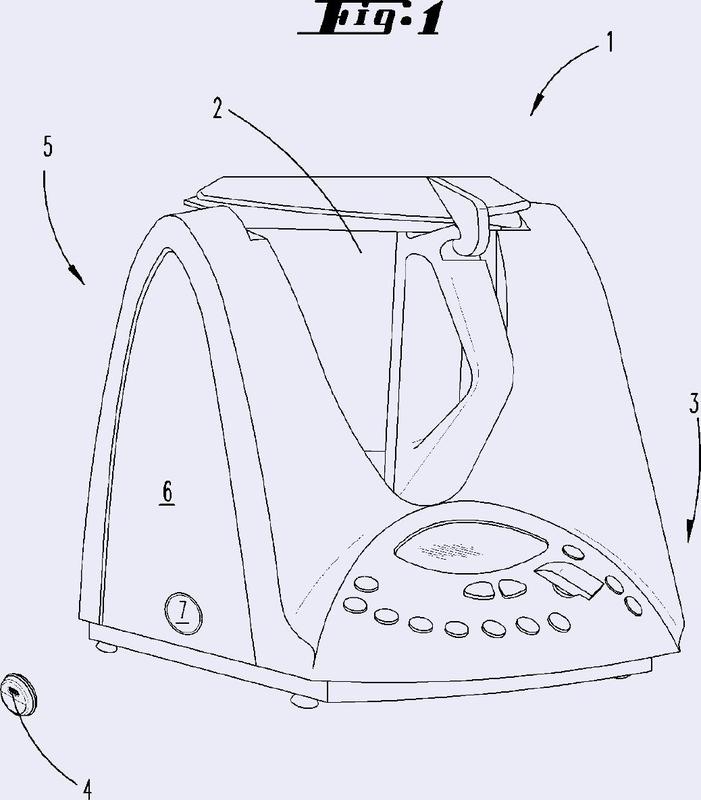
(25/05/2016) Robot de cocina con una base inferior , una parte posterior y una parte anterior , configurándose la parte anterior , partiendo de una forma de altura máxima del robot de cocina asignada a la parte posterior , de manera oblicua respecto a una vertical y moldeándose en la parte anterior un alojamiento para un recipiente de cocción , configurándose en una parte superior del robot de cocina unas piezas en forma de varilla en voladizo y disponiéndose los extremos anteriores de las varillas en un mismo plano horizontal (E') y, en relación con una extensión que es la que más sobresale hacia delante, desplazados respecto a la parte posterior del robot de cocina , caracterizado…
Recipiente de cocción para el vaso calentable de un robot de cocina.
(25/05/2016) Robot de cocina con un vaso calentable insertado en el mismo y con un recipiente de cocción dispuesto sobre el vaso , presentando el recipiente de cocción un fondo con al menos un orificio de fondo , a través del cual el vapor que sale del vaso puede entrar en el recipiente de cocción y/o el condensado que sale del recipiente de cocción puede entrar en el vaso , presentando el fondo por el lado orientado en dirección del interior del recipiente de cocción una pluralidad de distanciadores que sobresalen del fondo para el distanciamiento de un producto a cocinar contenido en el recipiente de cocción del orificio de fondo , estando el orificio de fondo rodeado en dirección perimetral, al menos en parte, por los distanciadores , configurándose los distanciadores a modo de nervios, filamentos o ranuras con una extensión…
Robot de cocina eléctrico.
Sección de la CIP Necesidades corrientes de la vida
(11/05/2016). Inventor/es: HILGERS, STEFAN, HACKERT,GEORG, SCHOMACHER,JUTTA, SAUERWALD,ANDRES. Clasificación: A47J43/07.
Robot de cocina eléctrico para procesar alimentos por medio de al menos una función de procesamiento que puede ajustar un usuario,
con un dispositivo de ajuste para el ajuste por parte del usuario de al menos un parámetro de la función de procesamiento,
estando configurado el dispositivo de ajuste como botón giratorio, caracterizado
por que está previsto un modo de funcionamiento en el que, por medio de un giro del botón giratorio en un sentido, se modifica el parámetro por una primera magnitud por ángulo de giro y, por medio de un giro del botón giratorio en el sentido contrario, se modifica el parámetro por una segunda magnitud por ángulo de giro, siendo la primera magnitud diferente de la segunda magnitud.
PDF original: ES-2626576_T3.pdf
Máquina de cocina eléctricamente accionada.
Sección de la CIP Necesidades corrientes de la vida
(11/05/2016). Inventor/es: CALDEWEY, UWE. Clasificación: A47J43/07, A47J43/046, A47J36/10.
Máquina de cocina eléctricamente accionada que comprende un vaso de batido , un mecanismo de batido accionado por motor eléctrico en el vaso de batido y una tapa para el vaso de batido , pudiendo enclavarse la tapa preferiblemente por motor eléctrico, caracterizada por una combinación de al menos las particularidades siguientes:
1.1 el motor eléctrico que produce el enclavamiento presenta una potencia de salida de 1 a 10 vatios;
1.2 el motor eléctrico actúa sobre una pieza de enclavamiento por medio de un engranaje reductor con una desmultiplicación superior a 50:1;
1.3 el motor eléctrico es un motor de corriente continua.
PDF original: ES-2577128_T3.pdf
Robot de cocina con dispositivo de posicionamiento.
(11/05/2016) Robot de cocina , en particular batidora, con una carcasa , en la que está dispuesto un recipiente , presentando la carcasa una zona de alojamiento de recipiente , con la que puede unirse el recipiente , presentando el recipiente y la zona de alojamiento de recipiente contactos eléctricos para la conexión de un dispositivo eléctrico del recipiente , en particular de un dispositivo de calentamiento y/o un dispositivo de medición, a un suministro de corriente del robot de cocina , caracterizado por que la zona de alojamiento de recipiente y/o el recipiente presentan un dispositivo de posicionamiento , que está configurado para posicionar…
Robot de cocina con dispositivo de bloqueo.
(04/05/2016) Robot de cocina , especialmente batidora, con una carcasa en la que se puede disponer un vaso , presentando la carcasa una zona de recepción del vaso en la que se puede colocar el vaso , configurándose la zona de recepción del vaso al menos en una parte de forma correspondiente al vaso de manera que el vaso se puede orientar, en el transcurso de la colocación en la zona de recepción del vaso , tanto respecto a una dirección vertical como respecto a una dirección perimetral del vaso , caracterizado por que la zona de recepción del vaso se configura fundamentalmente en forma de cilindro cuya camisa de cilindro presenta un rebaje de camisa , por lo que el cilindro se configura en dirección perimetral fundamentalmente abierto por la mitad de un lado,…
Robot de tratamiento de suelo con báscula para personas.
Secciones de la CIP Necesidades corrientes de la vida Física
(13/04/2016). Inventor/es: PLACHETKA,ROBERT. Clasificación: A47L5/00, G01G19/56.
Robot de tratamiento de suelo
- con un aparato de tratamiento de suelo desplazable de manera automática y
- con una carcasa ,
caracterizado
- por que la carcasa del aparato de tratamiento de suelo presenta en el lado superior una superficie de apoyo para soportar a una persona,
- por que el aparato de tratamiento de suelo presenta al menos una célula de carga y
- por que la célula de carga es adecuada para un pesaje del peso de la persona.
PDF original: ES-2622123_T3.pdf
Procedimiento para el desbloqueo de un cierre de una tapa que cierra un vaso de preparación, así como robot de cocina con un aparato de preparación.
Sección de la CIP Necesidades corrientes de la vida
(23/03/2016). Ver ilustración. Inventor/es: KRAUT-REINKOBER, STEFAN, LANG,TORSTEN. Clasificación: A47J43/07, A47J43/046, A47J36/32.
Procedimiento para el desbloqueo de un cierre de una tapa que cierra un vaso de preparación , especialmente un vaso de preparación dotado de un mecanismo de mezcla y/o calentable de un robot de cocina , especialmente después de una desconexión del mecanismo de mezcla y/o del dispositivo de calentamiento , midiéndose y almacenándose un valor de estado utilizado para una preparación de un alimento, comparándose el valor de estado medido dentro de un determinado espacio de tiempo con datos de referencia almacenados y produciéndose el desbloqueo del cierre después de un tiempo de retardo determinado en dependencia del resultado de comparación, caracterizado por que se mide el valor de estado dentro del vaso de mezcla, por que el valor de estado medido indica una masa y/o una fuerza que actúa en una pared del vaso de preparación o de la tapa y/o una presión y/o una velocidad de flujo del alimento contenido en el vaso de preparación.
PDF original: ES-2645259_T3.pdf
Accesorio de cocina para una mezcladora calefactable de una máquina de cocina.
(23/03/2016) Accesorio de cocina para un recipiente calefactable de una máquina de cocina , en el que el accesorio de cocina presenta una pared de accesorio de cocina , que presenta al menos en una zona del fondo que se puede disponer en el recipiente unos orificios del fondo , a través de los cuales el vapor que sale desde el recipiente puede entrar en el accesorio de cocina y puede refluir condensado al recipiente , en el que la pared del accesorio de cocina está configurada al menos parcialmente de doble pared con una pared interior que delimita el espacio de preparación del accesorio de cocina y una pared exterior configurada deparada de ella, especialmente distanciada de la pared interior por un espacio intermedio , caracterizado por que la pared interior presenta un material con una conductividad…
Robot de cocina eléctrico.
Sección de la CIP Necesidades corrientes de la vida
(09/03/2016). Ver ilustración. Inventor/es: WEBER, KLAUS, MARTIN, LANG,TORSTEN. Clasificación: A47J43/07, A47J43/046, A47J36/10.
Robot de cocina eléctrico , con un recipiente , una tapa para cerrar el recipiente , un dispositivo de procesamiento para procesar un alimento en el recipiente y una parte de bloqueo para bloquear la tapa sobre el recipiente , pudiendo girar la parte de bloqueo para bloquear la tapa sobre el recipiente por medio de un accionamiento de bloqueo sobre un eje de bloqueo, caracterizado por que está previsto un dispositivo de detección, con el que puede detectarse el trayecto que recorre el accionamiento de bloqueo, la parte de bloqueo propiamente dicha y/o una parte de unión que une el accionamiento de bloqueo con la parte de bloqueo , durante el giro de la parte de bloqueo.
PDF original: ES-2616742_T3.pdf
Aparato autodesplazable de limpieza de suelos.
Sección de la CIP Necesidades corrientes de la vida
(09/03/2016). Ver ilustración. Inventor/es: SCHLISCHKA, PATRICK. Clasificación: A47L11/40.
Aparato autodesplazable de limpieza de suelos que presenta un chasis y varias ruedas , pudiéndose accionar al menos una rueda y uniéndose la rueda accionable al chasis a través de una pieza de suspensión que apoya la rueda y que se mueve respecto al chasis , desplazándose la rueda además para el apoyo en un suelo por el que se puede desplazar el aparato de limpieza de suelos , estando la misma sujeta al efecto de un muelle que ejerce una fuerza elástica y pudiéndose introducir y extraer la rueda con ayuda de una pieza de suspensión respecto al chasis , caracterizado por que la fuerza elástica se puede variar independientemente de un aumento o de una disminución de la fuerza elástica provocada por una introducción y extracción, especialmente incrementar con el aumento de la extracción de la rueda.
PDF original: ES-2651913_T3.pdf
Aparato de cocción multifunción con control de recetas.
(02/03/2016) Un aparato de cocción multifunción para al menos un soporte de cocción semiautomatizado, que comprende:
un componente de interfaz configurado para acceder a una pluralidad de programas de recetas en un dispositivo de almacenamiento de datos en el que un programa de receta particular comprende una porción de control que tiene una pluralidad de instrucciones de control con al menos un ajuste de parámetros técnicos para controlar las etapas de cocción realizadas por el aparato de cocción en caso de ejecutar la porción de control;
al menos un componente de memoria configurado para cargar la porción de control desde el dispositivo de almacenamiento de datos para ejecutar;
al menos un componente…
Vaso de batido para una máquina de cocina.
(02/03/2016) Vaso de batido para una máquina de cocina con un mecanismo batidor dispuesto en el fondo del vaso de batido y extraíble hacia el interior de dicho vaso de batido , en el que está previsto también un pie de soporte conectable con el lado exterior del fondo del vaso de batido y un árbol del mecanismo batidor atraviesa el fondo del vaso de batido, en el que está previsto, además, en el mecanismo batidor un cuerpo de penetración que, considerado en dirección axial, presenta en al menos dos planos axialmente distanciados, unos salientes de inmovilización que se proyectan radialmente, referido a un eje de giro (x) del árbol del mecanismo batidor, y que están destinados a inmovilizar…
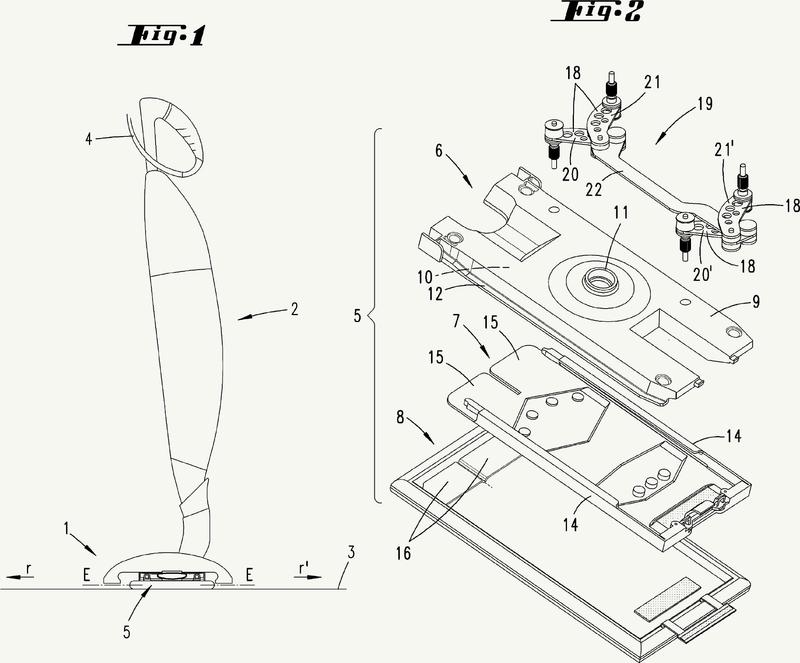
Espátula, en particular para robots de cocina.
Sección de la CIP Necesidades corrientes de la vida
(02/03/2016). Ver ilustración. Inventor/es: KEMKER, UWE, LESSEL,THOMAS. Clasificación: A47J43/28.
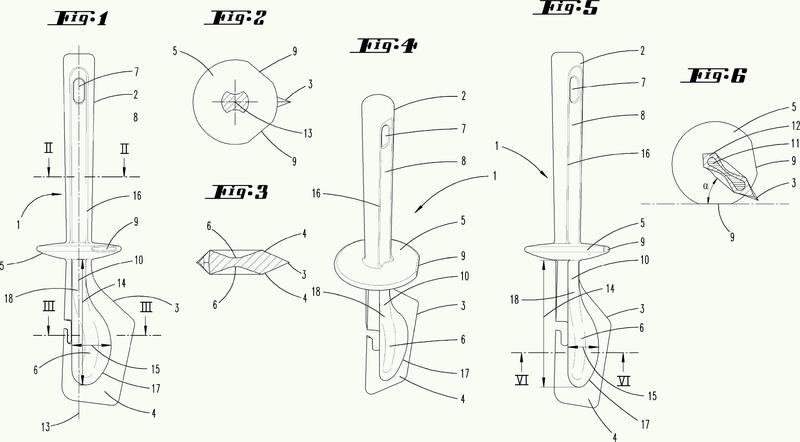
Espátula , en particular para robots de cocina, que presenta una parte de mango y una parte de trabajo con dos lados de parte de trabajo opuestos con respecto a un eje longitudinal de la espátula , caracterizada por que en los dos lados de parte de trabajo en cada caso está configurada una hendidura de trabajo y por que al menos una hendidura de trabajo en el lado dirigido hacia la parte de mango presenta un segmento de estrechamiento a modo de ranura, cuya anchura transversalmente al eje longitudinal de la espátula en una zona de entrada en la zona restante de la hendidura de trabajo corresponde a la mitad o menos de una anchura máxima de la hendidura de trabajo.
PDF original: ES-2639235_T3.pdf
Robot de cocina, que puede funcionar con un motor eléctrico, elemento de almacenamiento de datos y combinación de un robot de cocina que puede funcionar con un motor eléctrico y un elemento de almacenamiento de datos.
Sección de la CIP Necesidades corrientes de la vida
(27/01/2016). Ver ilustración. Inventor/es: JACOBS, CARSTEN, DR., HACKERT,GEORG, LANG,TORSTEN. Clasificación: A47J43/07.
Robot de cocina , que puede funcionar con un motor eléctrico, con una carcasa que presenta una superficie exterior y con una interfaz de transmisión de datos configurada para la interactuación con un elemento de almacenamiento de datos , caracterizado por que la interfaz de transmisión de datos está formada en una de las superficies exteriores de la carcasa por elementos de contacto metálicos dispuestos unos junto a otros, que presentan respectivamente una superficie de contacto y que representan respectivamente una parte de la superficie exterior.
PDF original: ES-2606492_T3.pdf
Procedimiento para la limpieza o el tratamiento de una habitación por medio de un aparato autodesplazable.
(27/01/2016) Procedimiento para la limpieza o el tratamiento de una habitación por medio de un aparato autodesplazable , con los pasos de
- creación de un mapa de la habitación,
- almacenamiento del mapa de la habitación dentro de una memoria de datos,
- selección de una zona parcial de la habitación mediante la toma de una foto de la zona parcial por un usuario,
- transmisión de los datos locales de la zona parcial seleccionada a un ordenador conectado a la memoria de datos,
- comparación de los datos locales de la zona parcial seleccionada con los datos locales contenidos en el mapa para la identificación de la zona parcial por medio del ordenador y
- limpieza o tratamiento de la habitación…
Sección de la CIP Electricidad
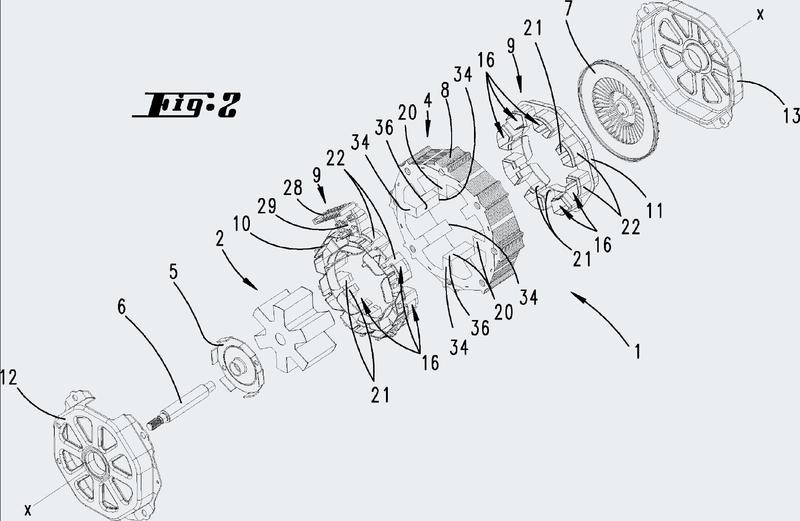
(21/01/2016). Ver ilustración. Inventor/es: CALDEWEY, UWE, LIENENLUKE, PAUL, THEUERMANN,VOLKER. Clasificación: H02K3/52, H02K11/00, H02K15/095.
Motor de reluctancia con un rotor y un estator , en el que el estator presenta bobinas de estator individuales, que rodean núcleos de arrollamiento del núcleo de estator , formadas por arrollamientos de estator , y en el que, además, está previsto un cuerpo de cubierta de estator , en el que en el cuerpo de cubierta de estator está fijada una pletina como soporte de componentes electrónicos , en el que la pletina presenta dos barreras ópticas distanciadas circunferencialmente, caracterizado por que la pletina es soporte de un sensor de temperatura para la detección de la temperatura del motor, en el que una temperatura del aire medida por el sensor de temperatura es utilizada para la detección de la temperatura del motor.
PDF original: ES-2556933_T3.pdf
Aparato friegasuelos y cuerpo accionado de manera oxidante con relación a una pieza fija.
Sección de la CIP Necesidades corrientes de la vida
(20/01/2016). Ver ilustración. Inventor/es: DIEUDONNE, STEPHAN PETER, JACOBS, CARSTEN, DR., LAPP, OLIVER. Clasificación: A47L11/40, A47L11/12, A47L11/202, A47L11/284.
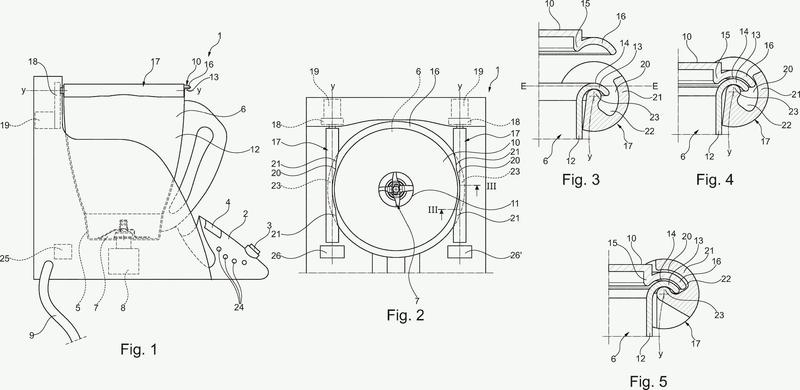
Aparato friegasuelos con un cuerpo oscilante alargado accionado por motor y una carcasa que forma una parte fija , en donde el cuerpo oscilante es controlado por unos elementos de guía en lo que respecta al movimiento de oscilación, caracterizado por que el cuerpo oscilante oscila en conjunto en forma circular como consecuencia de una acción de excéntrica.
PDF original: ES-2556811_T3.pdf
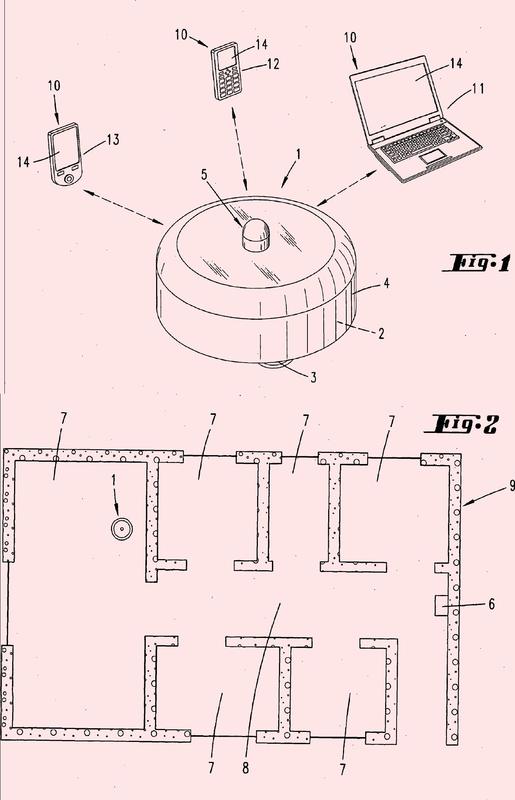
Procedimiento de funcionamiento de un robot de limpieza.
Sección de la CIP Física
(23/12/2015). Ver ilustración. Inventor/es: MEYER, FRANK, SCHLISCHKA, PATRICK, SAUERWALD,ANDRES, WALLMEYER,MARIO. Clasificación: G05D1/00.
Procedimiento de funcionamiento de un robot de limpieza , preferiblemente un robot barredor y/o aspirador, en el que el robot está preparado para captar locales en forma de un mapa, con miras a trasladar el robot sobre el suelo de uno o varios recintos (10 a 15), y en el que el robot dispone también de medios sensores para determinar la posición dentro de un recinto (10 a 15) así captado, caracterizado por que el robot puede hacerse funcionar discrecionalmente para el procesamiento de una superficie en virtud de una captación automática de un local (10 a 15) y también para el procesamiento de una superficie que ha sido ingresada previamente por un recorrido de autoinstrucción de los límites de dicha superficie, pudiendo realizarse en ambos casos, durante un procesamiento de una superficie, una comprobación del trayecto prefijado con ayuda de los límites del recinto actualmente captados.
PDF original: ES-2558331_T3.pdf
Procedimiento para el control de un robot.
Secciones de la CIP Física Necesidades corrientes de la vida
(18/12/2015). Ver ilustración. Inventor/es: KEMKER, UWE, SCHLISCHKA, PATRICK, WALLMEYER,MARIO. Clasificación: G05D1/00, G05D1/02, G08G1/123, A47L9/00.
Procedimiento para el control de un robot , con preferencia de un robot de barrar y/o de aspirar desplazable de forma autónoma, en el que en el robot se crea y se registra un mapa del entorno o bien de una vía de desplazamiento predeterminada, en el que, además, un aparato exterior actúa para el control sobre el robot , se transmite el mapa fuera del robot sobre el aparato exterior y se representa la posición del robot dentro del mapa , caracterizado por que el mapa del entorno se crea en el aparato exterior y el mapa creado de esta manera se transmite al robot.
PDF original: ES-2554381_T3.pdf
Máquina de cocina eléctricamente accionada.
(07/12/2015) Máquina de cocina eléctricamente accionada con un recipiente de cocinado y una tapa para el recipiente de cocinado , en la que la tapa puede ser enclavada en la posición de cierre contra el recipiente de cocinado , en la que, además, el recipiente de cocinado presenta un fondo y una pared que se extiende hacia arriba desde dicho fondo, la pared del recipiente hace transición a un borde radialmente volado del recipiente, la tapa presenta un borde que en la posición de cierre está superpuesto al borde del recipiente, y el enclavamiento está formado por una pieza de enclavamiento que está…
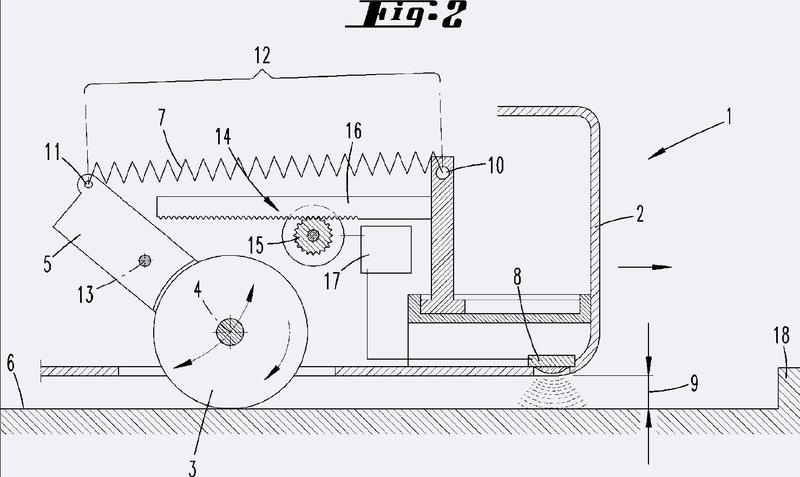
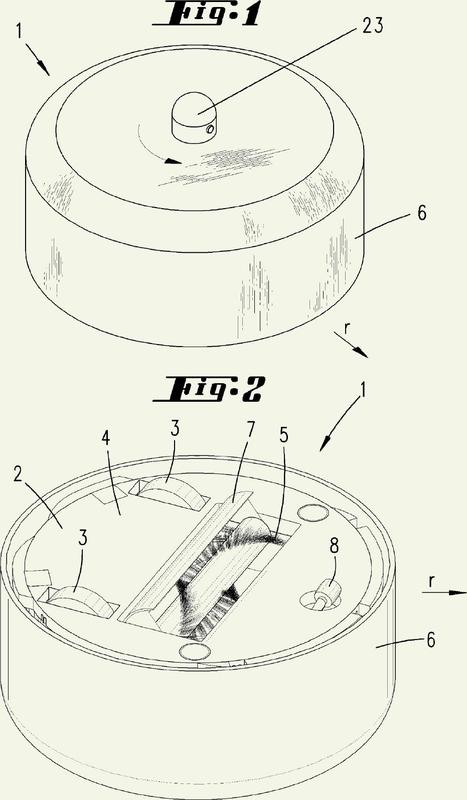
(19/08/2015) Aparato barredor móvil con un cepillo barredor , un recinto colector de suciedad asociado , un equipo de aplicación de líquido , que está dispuesto detrás del cepillo barredor en la dirección de traslación (r), y un equipo de deshumectación , estando dispuesto un equipo de limpieza delante del equipo de deshumectación , caracterizado por que el equipo de deshumectación está dispuesto detrás del equipo de aplicación de líquido , por que el equipo de limpieza es un rodillo de limpieza y por que el rodillo de limpieza está forrado con un paño de limpieza .
Aparato de limpieza por aspiración accionado por motor eléctrico.
(20/05/2015) Aparato (S) de limpieza por aspiración accionado por motor eléctrico, que comprende una boca de aspiración y un canal de aspiración , estando dispuesto, además, un sensor de humedad en el canal de aspiración , caracterizado por que el canal de aspiración , al detectarse una humedad, se abre en el sentido de una abertura de aire secundario.
Procedimiento para la determinación de la posición de un aparato desplazable automáticamente.
(01/04/2015) Procedimiento para la determinación de la posición de un aparato desplazable automáticamente, en particular aparato acumulador de polvo del suelo desplazable automáticamente, con ruedas de desplazamiento accionadas con preferencia con motor eléctrico, en el que el aparato está provisto con una unidad de reconocimiento de obstáculos (A), que está constituida por unidades ópticas de emisión y de recepción, en el que, además, se calculan una pluralidad de posiciones y de alineaciones posibles a partir de una primera supuesta posición del aparato , previamente calculada, una posición y/o una alineación posibles del aparato se designan en este caso también como partículas, y después de un desplazamiento correspondiente del…
Máquina de cocina eléctricamente accionada.
(28/01/2015) Máquina de cocina eléctricamente accionada con un recipiente de cocinado y una tapa para el recipiente de cocinado , en la que la tapa puede ser enclavada en la posición de cierre contra el recipiente de cocinado , en la que, además, el recipiente de cocinado presenta un fondo y una pared que se extiende hacia arriba desde el fondo, en la que la pared del recipiente hace transición a un borde radialmente volado del recipiente, en la que, además, la tapa presenta un borde que en la posición de cierre está superpuesto al borde del recipiente, en la que, además, el enclavamiento está formado por una pieza de enclavamiento que está prevista para solapar a la tapa y que puede ser desplazada por giro alrededor de un eje (y) desde una posición de liberación hasta la posición de enclavamiento,…
Máquina de cocina accionada por motor eléctrico.
(24/12/2014) Máquina de cocina accionada por motor eléctrico que comprende una unidad de corte (S) para cortar un producto, en la que la unidad de corte (S) presenta un primer filo accionado para rotación que está cubierto por una tapa que presenta una abertura de introducción , en la que, además, están dispuestos verticalmente por debajo del primer filo unos segundos filos , de los que uno o varios están dirigidos transversalmente al primer filo , y en la que los segundos filos son accionados a rotación juntamente con el primer filo , caracterizada por que el producto a cortar, para atravesar los segundos filos , es presionado verticalmente hacia abajo a través de dichos segundos filos y por que el producto a cortar atraviesa los segundos…
Máquina de cocina accionada por motor eléctrico.
(24/12/2014) Máquina de cocina accionada por motor eléctrico que comprende una unidad de corte (S) para cortar un producto, en la que la unidad de corte (S) presenta un primer filo accionado para rotación que está cubierto por una tapa que presenta una abertura de introducción , en la que, además, están dispuestos verticalmente por debajo del primer filo unos segundos filos , de los que uno o varios están dirigidos transversalmente al primer filo , y en la que, además, para atravesar los segundos filos , el producto a cortar es presionado verticalmente hacia abajo a través de los segundos filos , caracterizada por que la unidad de corte (S) está dispuesta en un vaso de batido que presenta por el lado del fondo un órgano de arrastre …
Máquina de cocina eléctricamente accionada.
(17/12/2014) Máquina de cocina eléctricamente accionada con un recipiente de cocinado y una tapa para el recipiente de cocinado , en la que la tapa puede ser enclavada en la posición de cierre contra el recipiente de cocinado , en la que, además, el recipiente de cocinado presenta un fondo y una pared que se extiende hacia arriba desde dicho fondo, la pared del recipiente hace transición a un borde radialmente volado del recipiente, la tapa presenta un borde que en la posición de cierre está superpuesto al borde del recipiente, el enclavamiento está formado por una pieza de enclavamiento que está prevista para solapar a la tapa y que puede ser desplazada por giro alrededor de un eje (y) desde una posición de liberación hasta la posición…
Bolsa de filtro con una placa de retención.
(29/10/2014) Bolsa de filtro con una placa de retención , en la que al menos una zona parcial de la bolsa de filtro se puede apoyar en la placa de retención , caracterizado por que la zona parcial está conectada con una sección de palanca conformada para el manejo manual, con lo que se consigue un arrastre forzado de la zona parcial , para la colocación de la bolsa de filtro en un estado insertado en la cámara de la bolsa de filtro .
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}