56 patentes, modelos y diseños de ASEA BROWN BOVERI AB
DISPOSITIVO Y METODO PARA PREVENIR LA CORROSION POR EFECTO SOMBRA.
Sección de la CIP Física
(16/11/2004). Inventor/es: WIKMARK, GUNNAR. Clasificación: G21C7/10, G21C3/00.
Un dispositivo que comprende un primer componente que consta de una aleación basada en zirconio, y un segundo componente de un tipo que puede formar un contraelectrodo en relación con el primer componente, estando dispuestos dichos primer y segundo componente a una corta distancia uno del otro, con un medio eléctricamente conductor entre ellos y estando sometidos a una radiación radiactiva a través de un campo de radiación. El dispositivo comprende un medio dispuesto para aislar eléctricamente al menos una parte del segundo componente del primer componente con el fin de evitar la corrosión por sombra sobre el primer componente. Un procedimiento para evitar la corrosión por sombra sobre el primer componente se caracteriza en que al menos una parte del segundo componente está aislada eléctricamente del primer componente.
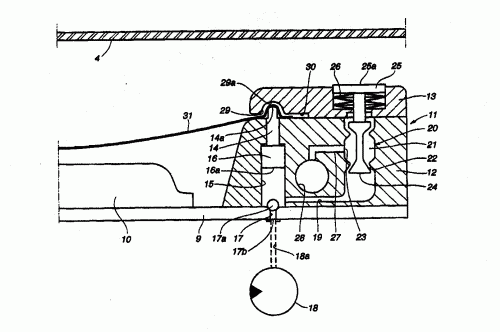
DISPOSITIVO QUE PERMITE SUJETAR UNA PIEZA EN BRUTO EN UNA PRENSA DE CELDA LLENA DE FLUIDO Y PRENSA DE CELULA LLENADA DE FLUIDO.
Sección de la CIP Técnicas industriales diversas y transportes
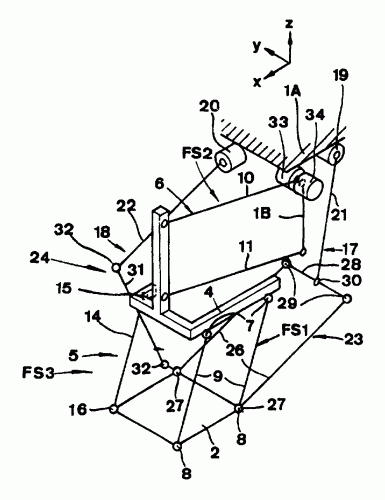
(01/03/2004). Ver ilustración. Inventor/es: HELLGREN, KEIJO, SVENSSON, LENNART. Clasificación: B30B5/02, B21D22/22.
DISPOSITIVO PARA SOSTENER, POR FRENADO, UNA PIEZA EN BRUTO PREFERENTEMENTE EN FORMA DE LAMINA CUANDO SE FORME LA PIEZA EN UNA PRENSA DE CELULA RELLENA DE FLUIDO. DURANTE LA FORMACION, SE LE APLICA A UN LADO DE LA PIEZA UNA PRESION DE FORMACION HIDRAULICA A TRAVES DE UN DIAFRAGMA ELASTICO . EL DISPOSITIVO CONSTA DE UN PRIMER MEDIO PARA GENERAR UNA PRESION HIDRAULICA QUE SOSTIENE LA PIEZA Y UN SEGUNDO MEDIO (15,16,17A) PARA ALIMENTAR CON ESTA PRESION UNA PIEZA MOVIL Y MANTENER LA PRESION. LA PIEZA MOVIL SE ADAPTA, EN TANTO QUE SE MANTIENE LA PRESION DE SOPORTE SOBRE LA PIEZA EN BRUTO, PARA SOSTENER PARTE DE LA PIEZA POR FRENADO CONTRA UN SOPORTE . PARA MEJORAR LOS RESULTADOS DE LA FORMACION, EL DISPOSITIVO CONSTA DE MEDIO QUE, BAJO LA INFLUENCIA DIRECTA DE LA PRESION DE FORMACION, REDUCE LA PRESION DE SOPORTE DE LA PIEZA CUANDO ESTA PRESION ALCANCE UN VALOR PREDETERMINADO.
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
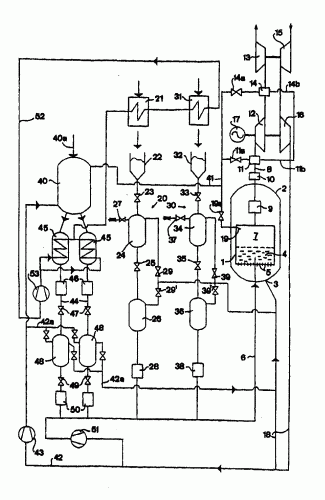
(01/01/2004). Ver ilustración. Inventor/es: BRANNSTROM, ROINE, LOVGREN, ANDERS, VEENHUIZEN, DIRK. Clasificación: F01K23/06, F02C3/28, F23C6/04, F02C3/20.
UNA PLANTA PARA PROCESOS DE COMBUSTION COMPRENDE UNA CAMARA DE COMBUSTION EN LA CUAL TIENE LUGAR LA COMBUSTION DE UN COMBUSTIBLE MIENTRAS QUE SE PRODUCEN GASES DE COMBUSTION, Y UN DISPOSITIVO DE GASIFICACION QUE SE DISPONE PARA PRODUCIR UN GAS COMBUSTIBLE Y UN PRODUCTO RESIDUAL COMBUSTIBLE DESGASIFICADO. MAS AUN, LA PLANTA COMPRENDE MEDIOS DE TRANSPORTE QUE ESTAN DISEÑADOS PARA DESCARGAR EL PRODUCTO RESIDUAL DEL DISPOSITIVO DE GASIFICACION Y SUMINISTRARLO A LA CAMARA DE COMBUSTION PARA EFECTUAR LA COMBUSTION DEL PRODUCTO RESIDUAL EN LA CAMARA DE COMBUSTION. PARA SIMPLIFICAR LOS MEDIOS DE SUMINISTRO, SE DISPONEN MEDIOS PARA ENFRIAR EL PRODUCTO RESIDUAL DESCARGADO DEL DISPOSITIVO DE GASIFICACION.
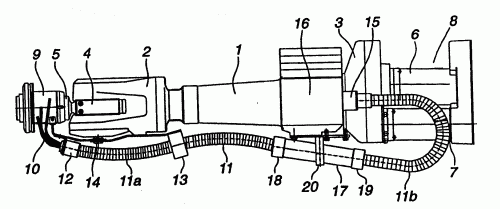
DISPOSITIVO PARA SOPORTAR UN CONJUNTO DE CABLES PARA UN ROBOT INDUSTRIAL.
Secciones de la CIP Técnicas industriales diversas y transportes Electricidad Mecánica, iluminación, calefacción, armamento y voladura
(16/07/2003). Ver ilustración. Inventor/es: SPRINGMANN, STEFAN. Clasificación: B25J19/00, H02G11/00, F16L3/01.
DISPOSTIVO DESTINADO A SOPORTAR Y GUIAR UN CONJUNTO DE CABLES ENTRE UNA PRIMERA PARTE DE MANIPULADOR Y UNA SEGUNDA PARTE DE MANIPULADOR MOVIL CON RELACION A LA PRIMERA PARTE. DICHO DISPOSITIVO CONSTA DE UN ELEMENTO PORTADOR DE CONJUNTO DE CABLES , FIJADO A LA PRIMERA PARTE DE MANIPULADOR, ALARGADO Y TUBULAR, EXTENDIENDOSE EL CONJUNTO DE CABLES LONGITUDINALMENTE EN DICHO ELEMENTO PORTADOR. DESDE UNA POSICION INICIAL, EL MOVIMIENTO DEL CONJUNTO DE CABLES SE MODIFICA POR UNA FUERZA DE RETORNO.
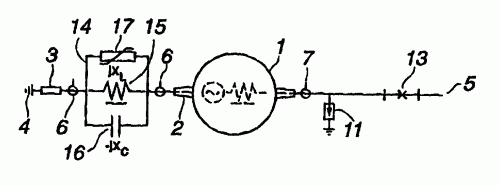
REDUCCION DE ARMONICAS EN MAQUINAS DE CA.
Sección de la CIP Electricidad
(01/05/2003). Ver ilustración. Inventor/es: GERTMAR, LARS. Clasificación: H02J3/01.
DISPOSITIVOS DE CONEXION PARA REDUCIR EL EFECTO DE LAS TENSIONES DE LA TERCERA ARMONICA EN CASO DE CONEXION DIRECTA DE MAQUINAS DE CORRIENTE ALTERNA (CA) A UNA RED TRIFASICA DE DISTRIBUCION O TRANSMISION , CARACTERIZADA PORQUE EL ARROLLAMIENTO DEL ESTATOR DE LA MAQUINA DE CA VA CONECTADA EN ESTRELLA Y PORQUE ESTA DISPONIBLE EL PUNTO NEUTRO DEL ARROLLAMIENTO , COMPRENDIENDO UN FILTRO SUPRESOR SINTONIZADO A LA TERCERA ARMONICA, CON UN DISPOSITIVO DE PROTECCION CONTRA SOBRETENSIONES DISPUESTO ENTRE EL PUNTO NEUTRO Y LA MASA DE LA RED DE POTENCIA.
Sección de la CIP Física
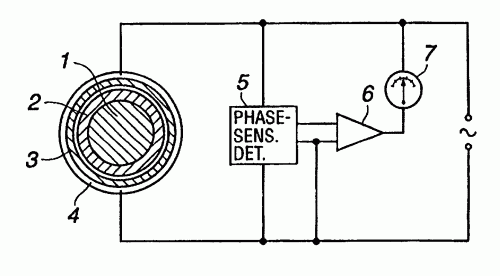
(01/04/2003). Ver ilustración. Inventor/es: SOBEL, JARL. Clasificación: G01L3/10.
LA INVENCION SE REFIERE A UN TRANSDUCTOR DE PAR QUE COMPRENDE UN EJE PROVISTO DE UN ANILLO POLARIZADO CIRCULARMENTE , EL CUAL, AL APLICAR UN PAR AL EJE, GENERA UN CAMPO MAGNETICO AXIAL ESTATICO EN EL EJE Y DONDE EL ANILLO ESTA RODEADO CONCENTRICAMENTE POR UN CUERPO TUBULAR ESTACIONARIO LIBREMENTE DISPUESTO EN RELACION AL EJE Y PROVISTO DE AL MENOS UN DEVANADO PARA LA IMANTACION DEL EJE CON UNA FRECUENCIA DADA. UN DETECTOR SENSIBLE A LAS VARIACIONES DE FASE CONECTADO AL DEVANADO SUMINISTRA UNA SEÑAL CORRESPONDIENTE AL CONTENIDO DE LOS VOLTAJES CON ARMONICOS REGULARES QUE SE INDUCEN EN EL DEVANADO DE LA FRECUENCIA DE UN CONTROLADOR . EL CONTROLADOR GENERA UNA CORRIENTE CONTINUA QUE ES PROPORCIONAL A LA SEÑAL Y SE CONECTA AL DEVANADO CON UNA POLARIDAD TAL QUE CONTRARRESTA EL CAMPO MAGNETICO ESTATICO GENERADO EN EL EJE. ESTA CORRIENTE CONTINUA CONSTITUYE UNA MEDIDA DEL PAR APLICADO AL EJE.
UN DISPOSITIVO PARA MOVIMIENTO RELATIVO DE DOS ELEMENTOS.
Sección de la CIP Técnicas industriales diversas y transportes
(01/04/2003). Ver ilustración. Inventor/es: BROGAARDH, TORGNY. Clasificación: B25J9/10, B25J11/00.
UN DISPOSITIVO PARA MOVIMIENTO RELATIVO DE DOS ELEMENTOS COMPRENDE DOS DISPOSICIONES DE ENLACES ACOPLADAS EN SERIE MEDIANTE UNA DISPOSICION DE CONEXION . UNA PRIMERA DISPOSICION DE ENLACES COMPRENDE AL MENOS TRES ENLACES QUE SON SUSTANCIALMENTE IGUALES EN LONGITUD Y PARALELOS, ESTANDO DICHOS ENLACES POSICIONADOS EN UNA RELACION SUSTANCIALMENTE TRIANGULAR VISTA A LO LARGO DE LA DIRECCION LONGITUDINAL DE LOS ENLACES, ENTRE LA DISPOSICION DE CONEXION Y EL ELEMENTO . LA SEGUNDA DISPOSICION COMPRENDE AL MENOS UN PARALELOGRAMO QUE ACTUA ENTRE LA DISPOSICION DE CONEXION Y EL ELEMENTO . LA PRIMERA Y LA SEGUNDA DISPOSICION DE APLICACION DE FUERZA ESTAN CONCEBIDAS PARA HACER QUE LA PRIMERA DISPOSICION DE ENLACES 85) PIVOTE. UNA TERCERA DISPOSICION DE APLICACION DE FUERZA ESTA CONCEBIDA PARA HACER QUE LA SEGUNDA DISPOSICION DE ENLACES PIVOTE.
PROCEDIMIENTO DE CONTROL DE UN ROBOT INDUSTRIAL.
Sección de la CIP Técnicas industriales diversas y transportes
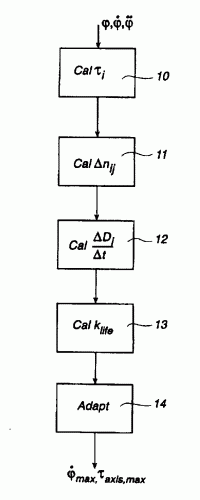
(16/02/2003). Ver ilustración. Inventor/es: ELFVING, STAFFAN, BROG RDH, TORGNY, DAHLQUIST, H KAN, HENRIKSSON, TORD. Clasificación: B25J9/16.
LA INVENCION SE REFIERE A UN METODO PARA EL CONTROL DE UN ROBOT INDUSTRIAL, QUE TIENE UNA SERIE DE EJES DE DESPLAZAMIENTO CON UN SENSOR DE POSICION PARA CADA UNO DE LOS REFERIDOS EJES QUE ESTA ADAPTADO PARA ENVIAR UNA SEÑAL DE SALIDA QUE DEFINE LA POSICION ACTUAL DEL EJE Y UN SISTEMA DE CONTROL PARA CONTROLAR LOS EJES DEL ROBOT. CONTINUAMENTE DURANTE EL FUNCIONAMIENTO DEL ROBOT, PARA AL MENOS UN PUNTO MECANICAMENTE CRITICO (I) DEL ROBOT, LA CARGA SIGNIFICATIVA ( TA I ) DURANTE UN INTERVALO PREFIJADO ( DL T ) SE CALCULA BASANDOSE EN LAS SEÑALES DE SALIDA ( PH 1 , ( PH 2 ..., PH 6 ) DE LOS SENSORES DE POSICION Y EN UN MODELO MATEMATICO DEL ROBOT. ADEMAS, LA TASA DE FATIGA ( DL D I / DL T ) DEL PUNTO SE C ALCULA EN FUNCION DE LA CARGA CALCULADA Y SABIENDO LA RESISTENCIA A LA FATIGA (N IJ ) DEL MATERIAL EN EL PUNTO CRITICO. EL RENDIMIENTO ( PH AXIS,MAX , TA AXIS,MAX ) DEL ROBOT SE AJUSTA, DEPENDIENDO DE LA TASA DE FATIGA Y DE LA VIDA DE SERVICIO DESEADA (T LIFE )PARA EL ROBOT.
PROCEDIMIENTO DE CONTROL DE UN ROBOT INDUSTRIAL QUE SE DESPLAZA SEGUN UNA TRAYECTORIA DADA.
(16/02/2003) LA INVENCION SE REFIERE A UN PROCEDIMIENTO PPARA EL CONTROL DEL MOVIMIENTO DE UN ROBOT INDUSTRIAL A LO LARGO DE UN CAMINO DADO (P1-P4) CON UNA VELOCIDAD DESEADA (V), DICHO ROBOT INDUSTRIAL TIENE UN NUMERO DE EJES DE MOVIMIENTO Y POR CADA EJE EQUIPO DE SERVOCONTROL DEL MOVIMIENTO AXIAL DE ACUERDO CON VALORES DE REFERENCIA ( TA KORR ) SUMINISTRADOS CON ESE FIN. PRIMERO, SE CALCULAN ESOS ANGULOS ( HI I ) QUE SE NECESITAN P PARA ASUMIR LA PROXIMA POSICION SOBRE EL CAMINO. DEPENDIENDO DE LOS ANGULOS AXIALES Y DE UN PRIMER MODELO MATEMATICO, QUE DESCRIBE LAS PROPIEDADES DINAMICAS Y ESTATICAS DEL ROBOT, SE CALCULA PPARA CADA UNO DE LOS EJES DE MOVIMIENTO EL…
DISPOSITIVO INDUCTIVO DE DETERMINACION DE LAS DIMENSIONES Y DE LAS POSICIONES DE OBJETOS A MEDIR HECHOS DE UN MATERIAL CONDUCTOR DE LA ELECTRICIDAD.
Sección de la CIP Física
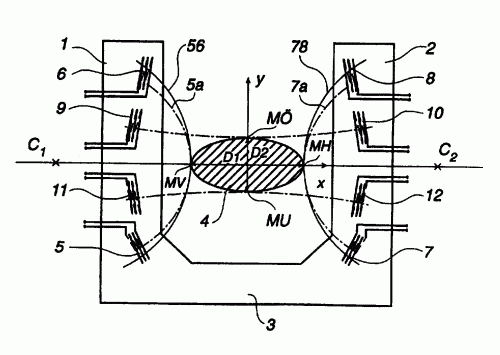
(16/06/2002). Ver ilustración. Inventor/es: LINDER, STEN. Clasificación: G01B7/00.
LA INVENCION SE REFIERE A UN DISPOSITIVO PARA LA DETERMINACION SIN CONTACTO DE LAS MEDIDAS Y LA POSICION DE UN OBJETO DE MEDIDA DE UN MATERIAL ELECTRICAMENTE CONDUCTIVO COMPUESTO, AL MENOS, POR UN PAR DE BOBINAS ASOCIADAS CONSISTENTES DE UNA BOBINA TRANSMISORA , PARA LA GENERACION DE UN CAMPO MAGNETICO VARIABLE EN EL TIEMPO EN EL OBJETO DE MEDIDA, Y DE UNA BOBINA RECEPTORA EN LA QUE SE INDUCE UN VOLTAJE DEPENDIENTE DE LA POSICION DE LA BOBINA TRANSMISORA, DE LA BOBINA RECEPTORA Y DE UNA REGION DE MEDICION (MV, MH, MO, MU) DEL OBJETO DE MEDICION RELATIVAS ENTRE SI. EL DISPOSITIVO INCLUYE UNA ESTRUCTURA EN FORMA DE U, UN SENSOR EN U CON DOS RAMAS , Y UNA PARTE DE RETENCION DISPUESTA ENTRE LAS MISMAS, ESTANDO FIJADAS LAS BOBINAS TRANSMISORA Y RECEPTORA A LA RAMAS DEL SENSOR EN U, Y SIENDO DESEADO QUE EL OBJETO DE MEDICION ESTE SITUADO CENTRALMENTE EN LA ABERTURA DEL SENSOR EN U.
PROCEDIMIENTO Y DISPOSITIVO PARA DETECTAR FALLOS DE ENCENDIDO EN MOTORES DE COMBUSTION INTERNA.
Secciones de la CIP Mecánica, iluminación, calefacción, armamento y voladura Física
(16/06/2002). Ver ilustración. Inventor/es: SOBEL, JARL, JEREMIASSON, JAN, WALLIN, CHRISTER. Clasificación: F02D41/22, G01M15/00.
UN PROCEDIMIENTO PARA LA DETECCION DE FALLOS EN EL ENCENDIDO UN MOTOR DE COMBUSTION INTERNA SEGUN EL CUAL SE MIDE EL PAR DEL MOTOR DE COMBUSTION INTERNA CON LA AYUDA DE UN DETECTOR DEL PAR QUE SE MONTA SOBRE EL CIGUEÑAL DEL MOTOR DE COMBUSTION INTERNA Y SE MUESTREA UNA SEÑAL DEL PAR DE FORMA SINCRONIZADA CON LA VELOCIDAD CON LA AYUDA DE UN DETECTOR . SE LLEVA A CABO UNA FILTRACION DIGITAL DE LA SEÑAL DEL PAR CON UN FILTRO DIGITAL QUE TIENE UNA RESPUESTA A LOS IMPULSOS FINITOS QUE BLOQUEA O ELIMINA UNA SELECCION DE MULTIPLOS DE ENTEROS O SEMIENTEROS DE LA VELOCIDAD DEL MOTOR DE COMBUSTION INTERNA, DEPENDIENDO SUSTANCIALMENTE LA SELECCION DE LOS MULTIPLOS DE LA VELOCIDAD DEL NUMERO DE CILINDROS DEL MOTOR DE COMBUSTION INTERNA.
ROBOT INDUSTRIAL CON TRANSMISION DE RUEDAS DENTADAS COMPACTA DE GRAN RELACION DE ENGRANAJES.
(16/01/2002) ESTA INVENCION SE REFIERE A UN SISTEMA DE ENGRANAJE COMPACTO QUE INCLUYE UN EJE DE ENTRADA , UN EJE DE SALIDA Y UNA RUEDA DENTADA QUE CONECTA A AMBOS, PROMOVIENDO LA IMPULSION, EN EL QUE EL EJE DE SALIDA ESTA MOVIDO POR UN MUÑON, DENTRO DEL ALOJAMIENTO DEL ENGRANAJE . DE ACUERDO CON LA INVENCION, EL EJE DE SALIDA ES HUECO Y TIENE UNAS ESPIGAS (5 A) QUE SE EXTIENDEN RADIALMENTE HACIA FUERA EN UN PLANO NORMAL Y CADA UNA DE LAS CUALES LLEVA UNA RUEDA DENTADA . A CADA LADO DE LAS ESPIGAS ESTA PROVISTA, RESPECTIVAMENTE, UNA CORONA DENTADA , UNIDA POR UN MUÑON AL EJE DE SALIDA Y QUE POSEE UN ANILLO DENTADO ENGRANADO CON LA RUEDA DENTADA . CADA CORONA DENTADA TIENE TAMBIEN UN ARO CILINDRICO DENTADO QUE ACTUA CONJUNTAMENTE, A DIFERENTES RELACIONES…
TRANSDUCTOR DE PAR MAGNETO-ELASTICO Y SIN CONTACTO.
Sección de la CIP Física
(01/04/2001). Inventor/es: SOBEL, JARL, LING, HANS, UGGLA, DAN, J. Clasificación: G01L3/10.
UN TRANSDUCTOR DEL PAR TORSOR MAGNETOELASTICO PARA MEDIR SIN CONTACTO FISICO, EL PAR TORSOR EN UN EJE ESTACIONARIO O GIRATORIO. EL TRANSDUCTOR COMPRENDE UN EJE CON DEVANADOS DE EXCITACION QUE LO RODEAN Y DEVANADOS DE MEDIDA . CONCENTRICAMENTE CON LAS ESPIRAS, SE CREAN ZONAS DE MEDICION ANISOTROPICA MEDIANTE LA APLICACION DE CAPAS , POR EJEMPLO EN FORMA DE BANDAS DE COBRE, EN LA SUPERFICIE DEL EJE. EN UNA VERSION PREFERIDA EL ANGULO ENTRE LAS BANDAS Y UNA GENERATRIZ DE LA SUPERFICIE DEL CILINDRO DEL EJE DEL TRANSDUCTOR SE DETERMINA QUE SEA DE (MAS MENOS) 45 (GRADOS).
PROCEDIMIENTO DE COLADA EN UN MOLDE.
(01/12/2000) SE PRESENTA UN METODO Y UN DISPOSITIVO PARA CONTROLAR EL FLUJO EN PARTES NO SOLIDIFICADAS DE UN RAMAL DE MOLDEO DURANTE EL MOLDEO DE UN METAL EN UN MOLDE QUE ESTA ABIERTO EN AMBOS EXTREMOS EN LA DIRECCION DE MOLDEO POR MEDIO DE UN AGITADOR DE MOLDEO DE DOS O MAS FASES QUE COMPRENDE DOS O MAS SUBAGITADORES QUE CADA UNO, A SU VEZ, COMPRENDE AL MENOS UN NUCLEO MAGNETICO (14A, 14B, 14C, 14D) Y UN BOBINADO DE FASE ALIMENTADO CON CORRIENTE ALTERNA (15A, 15B, 15C, 15D) DISPUESTO ALREDEDOR DEL NUCLEO, TAL COMO UNA BOBINA ENROLLADA CON LAMINAS METALICAS. LOS NUCLEOS Y LAS BOBINAS ENROLLADAS CON LAMINAS METALICAS INCLUIDAS EN LOS SUBAGITADORES ESTAN DISEÑADOS Y DISPUESTOS DE FORMA…
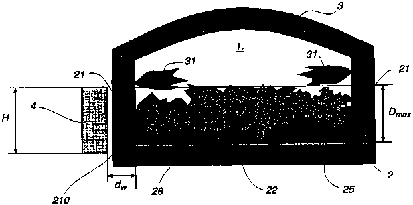
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(16/11/2000). Ver ilustración. Inventor/es: KARLSSON, LARS, TALLBACK, GOTE, EIDEM, MAGNUS, HENRIKSSON, PER, NORDEKVIST, LARS, OSCARSSON, PETTER, SELLBERG, GUNNAR. Clasificación: F27D23/04, F27B3/20.
UNA PLANTA DE HORNO QUE COMPRENDE AL MENOS UNA VASIJA DE HORNO CON DOS PAREDES LATERALES Y UN FONDO DE AL MENOS UNA FUENTE CALORIFICA QUE POR RADIACION Y CONVECCION CALIENTA METAL FUNDIDO Y/O METAL SOLIDO PRESENTE EN DICHA VASIJA DE HORNO. AL MENOS UN AGITADOR (4, 24, 24A, 24B, 24C, 34, 34A, 34B) LATERAL ELECTROMAGNETICO DE AL MENOS UNA, DOS O MULTIPLES FASES ESTA DISPUESTO EN, O CERCA DE, LA PARED DE LA VASIJA DE HORNO PARA ACTUAR A TRAVES DE DICHA PARED Y APLICAR UN CAMPO DEL AGITADOR AL METAL FUNDIDO. EL AGITADOR LATERAL COMPRENDE AL MENOS UNOS DEVANADOS DE DOS FASES DISPUESTOS ALREDEDOR DE UN NUCLEO DE HIERRO QUE TIENE UNA EXTENSION VERTICAL, H, QUE CUBRE ESENCIALMENTE LA REGION D SUB,MAX}, ENTRE EL FONDO Y LA SUPERFICIE SUPERIOR DEL METAL FUNDIDO EN UNA PROFUNDIDAD MAXIMA DEL BAÑO USADO EN LA VASIJA DEL HORNO. EL AGITADOR LATERAL ESTA DISPUESTO CON UN PASO DE POLO TA} QUE EXCEDE DOS VECES LA DISTANCIA DEL NUCLEO DE HIERRO AL METAL FUNDIDO, TA} > 2 D SUB,W}.
PRENSA DE ALTA PRESION Y PROCEDIMIENTO DE TRATAMIENTO DE SUBSTANCIAS A ALTA PRESION.
(16/10/2000) SE PRESENTA UNA PRENSA DE ALTA PRESION Y UN METODO PARA EL TRATAMIENTO DE ALTA PRESION DE SUBSTANCIAS. LA PRENSA DE ALTA PRESION COMPREN DE UN CILINDRO DE ALTA PRESION QUE CONSTA DE UN NUMERO DE ELEMENTOS DE CILINDRO CONCENTRICAMENTE DISPUESTOS . LOS ELEMENTOS DE CILINDRO ESTAN RADIALMENTE PRETENSIONADOS HASTA UNA PRETENSION PREDETERMINADA Y RODEAN UNA CAMARA DE ALTA PRESION PARA ACOMODAR UN MEDIO PRESURIZADO. UN REVESTIMIENTO INTERNO DE SEGURIDAD, FINO , QUE ESTA DISEÑADO PARA COLOCARSE EN EL CILINDRO DE ALTA PRESION HASTA QUE SE PRODUZCA UNA FRACTURA SOBRE EL REVESTIMIENTO INTERNO DE SEGURIDAD, ESTA CILINDRO EN EL INTERIOR DEL CILINDRO DE ALTA PRESION. ADEMAS, SE SUMINISTRAN MEDIOS PARA CONDUCIR AL MENOS PARTE DEL MEDIO PRESURIZADO DESDE LA CAMARA DE ALTA PRESION CUANDO SE PRODUZCA UNA FRACTURA EN EL REVESTIMIENTO…
Sección de la CIP Electricidad
(01/10/2000). Inventor/es: PAULSSON, LARS, ANGQUIST, LENNART. Clasificación: H05B7/144.
UN HORNO DE ARCO QUE TIENE UN ELECTRODO Y ELEMENTOS DE CONEXION PARA CONECTAR CON UNA RED DE SUMINISTRO DE ENERGIA PARA SUMINISTRAR UN ARCO EN EL ELECTRODO CON CORRIENTE. EL HORNO ESTA PROVISTO DE UN ELEMENTO GENERADOR DE IMPULSO DE VOLTAJE ADAPTADO, EN CONEXION CON UNA INTERRUPCION EN EL ARCO, PARA SUMINISTRAR LOS PULSOS DE VOLTAJE AL HORNO Y GOLPEAR EL ARCO.
DISPOSITIVO PARA LA FIJACION DE CABLES.
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(16/04/2000). Inventor/es: SANDBERG,BENGT. Clasificación: F16L3/22, F16L3/10.
UN DISPOSITIVO PARA LA UNION DE AL MENOS DOS CABLES CON CONDUCTORES CONTENIDOS EN LOS MISMOS, MEDIANTE LO CUAL SE APLICA UNA PRESION DE CONTACTO SOBRE LOS CABLES TAL QUE, POR UNA PARTE, EL CABLE ES FIJADO EN SU DIRECCION LONGITUDINAL, Y POR OTRA PARTE, LOS CONDUCTORES CONTENIDOS EN LOS MISMOS SE LES PERMITE UN MOVIMIENTO RELATIVO ENTRE SI. EL DISPOSITIVO DE UNION COMPRENDE DOS CUERPOS ELASTICOS RODEADOS DE DOS CARCASAS ABIERTAS , ENTRE LOS CUALES EL CABLE ES ENGANCHADO PARA CONSEGUIR LA UNION BLANDA ARRIBA DESCRITA.
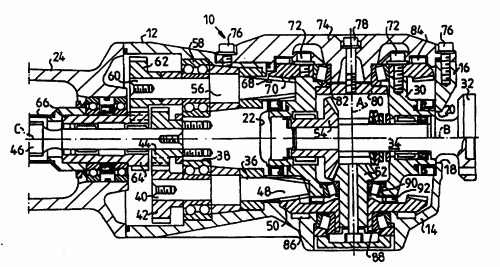
UNIDAD DE ACCIONAMIENTO PARA UN ROBOT INDUSTRIAL.
Secciones de la CIP Mecánica, iluminación, calefacción, armamento y voladura Técnicas industriales diversas y transportes Electricidad
(16/03/2000). Inventor/es: KULLBORG, OVE. Clasificación: F16H37/04, B25J9/10, B25J18/00, F16H57/02, H02K7/116.
UNA UNIDAD DE ARRASTRE COMPRENDE UN MOTOR ELECTRICO Y UNA UNIDAD DE TRANSMISION DE REDUCCION PENSADA PREFERIBLEMENTE PARA UN ROBOT INDUSTRIAL. UNA CAJA DE TRANSMISIONES SOSTIENE UN MOTOR CON UN ARBOL QUE SE EXTIENDE EN LA CAJA DE VELOCIDADES Y CUENTA CON UN PIÑON CONICO . UN EJE INTERMEDIO ESTA APOYADO EN DOS SOPORTES . EN EL ARBOL INTERMEDIO ESTA FIJADA UNA TRANSMISION CONICA MAYOR Y ENTRE LOS SOPORTES UNA TRANSMISION CILINDRICA MENOR . UN ARBOL DE SALIDA QUE CUENTA CON UNA TRANSMISION CILINDRICA MAYOR ESTA SOPORTADA ROTATORIAMENTE Y EN PARALELO EN EL ARBOL INTERMEDIO . LAS TRANSMISIONES ESTAN DISPUESTAS DE TAL FORMA QUE EL PIÑON CONICO ESTA UNIDO CON LA TRANSMISION CONICA MAYOR Y LA TRANSMISION CILINDRICA MENOR ESTA UNIDA CON LA TRANSMISION CILINDRICA MAYOR . EL ARBOL DEL MOTOR ESTA ORIENTADO APROXIMADAMENTE EN PERPENDICULAR CON EL ARBOL DE SALIDA.
PROCEDIMIENTO Y DISPOSITIVO DE TRATAMIENTO A ALTA PRESION DE SUSTANCIAS LIQUIDAS.
Secciones de la CIP Necesidades corrientes de la vida Técnicas industriales diversas y transportes
(01/01/2000). Inventor/es: BERGMAN, CARL, WESTERLUND, JAN. Clasificación: A23L2/42, A61L2/02, B01J3/04, A23L3/015.
SE PRESENTA UN METODO Y UN DISPOSITIVO PARA EL TRATAMIENTO A ALTA PRESION DE SUBSTANCIAS LIQUIDAS, POR EJEMPLO ALIMENTOS. LA SUBSTANCIA SUFRE UN PROCESO CICLICO EN EL CUAL UNA CANTIDAD LIMITADA DE SUBSTANCIA DURANTE CADA CICLO ES PRESURIZADA EN UN INTENSIFICADOR DE PRESION HASTA UNA PRESION PREDETERMINADA Y LUEGO SE MANTIENE A ESTA PRESION DURANTE UN PERIODO DE TIEMPO PREDETERMINADO. DESPUES DE QUE LA SUBSTANCIA HAYA SIDO PRESURIZADA EN EL INTENSIFICADOR DE PRESION , SE CONDUCE HASTA UNA CAMARA DE PRESION MIENTRAS SE MANTIENE UNA PRESION PREDETERMINADA. LA SUBSTANCIA ES OBLIGADA ADEMAS A RESIDIR EN LA CAMARA DE PRESION DURANTE UN PERIODO DE TIEMPO PREDETERMINADO QUE ES PROVOCADO POR EL PASO A LO LARGO DE UNA DISTANCIA PREDETERMINADA ENTRE UNA ENTRADA (9A) Y UNA SALIDA (9B), QUE ESTAN DISPUESTAS EN LA CAMARA DE PRESION.
UNIDAD DE MUÑECA PARA ROBOT INDUSTRIAL.
Sección de la CIP Técnicas industriales diversas y transportes
(01/12/1999). Ver ilustración. Inventor/es: LARSSON, JAN, DANIELSSON, STEFAN, GEPERTZ, JAN. Clasificación: B25J9/10, B25J17/02.
LA INVENCION SE REFIERE A UNA UNIDAD ARTICULADA PARA UN ROBOT INDUSTRIAL QUE CONSTA DE UN ALOJAMIENTO DE LA UNIDAD ARTICULADA DISEÑADO PARA QUEDAR FIJADO DE FORMA DESMONTABLE AL EXTREMO DISTAL DEL BRAZO DE UN ROBOT . EL ALOJAMIENTO DE LA UNIDAD ARTICULADA , QUE TIENE DOS BRAZOS DE HORQUILLA , SOPORTA UN ALOJAMIENTO DE INCLINABLE MONTADO DE FORMA PIVOTANTE , QUE A SU VEZ SOPORTA UN PLATAFORMA GIRATORIA MONTADA DE FORMA ROTATIVA SOBRE LA QUE SE PUEDE MONTAR UN ELEMENTO EXTERNO. EL ALOJAMIENTO INCLINABLE SE ENCUENTRA CONFINADO DE FORMA POSITIVA ENTRE EL BRAZO DE HORQUILLA PARA IMPEDIR ASI QUE LAS FUERZAS REACTIVAS DERIVADAS DE LOS ENGRANAJES PRESENTES EN EL ALOJAMIENTO FUERCEN A LOS BRAZOS DE HORQUILLA A SEPARARSE.
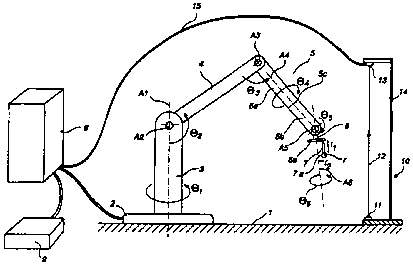
METODO Y DISPOSITIVO PARA LA CALIBRACION DE EJES DE MOVIMIENTO DE UN ROBOT INDUSTRIAL.
Sección de la CIP Técnicas industriales diversas y transportes
(16/11/1999). Ver ilustración. Inventor/es: SNELL, JOHN-ERIK. Clasificación: B25J19/00.
UN METODO PARA LA CALIBRACION DE UN ROBOT INDUSTRIAL . SE DISPONE DE UN DISPOSITIVO DE CALIBRACION COMPUESTO POR UN MEDIO EMISOR DE UN HAZ DE CALIBRACION DENTRO DEL RANGO DE TRABAJO DEL ROBOT, Y DE UN DETECTOR DE INTERRUPCION , EL CUAL DETECTA UNA INTERRUPCION EN EL HAZ DE CALIBRACION. DURANTE EL PROCESO DE CALIBRACION, SE MUEVE HACIA EL HAZ DE CALIBRACION A UNA HERRAMIENTA DE CALIBRACION SOSTENIDA POR LA MANO DEL ROBOT Y QUE ESTA COMPUESTA POR UNA ESFERA (7B) CON UN RADIO CONOCIDO (R). CUANDO SE DETECTA UNA INTERRUPCION EN EL HAZ DE CALIBRACION, SE LEEN Y SE ALMACENAN LAS SEÑALES DE SALIDA PROCEDENTES DE LOS TRANSDUCTORES DE POSICION DE LOS EJES DEL ROBOT. ESTE PROCESO SE REPITE UNA PLURALIDAD DE VECES CON LAS DIFERENTES CONFIGURACIONES DEL ROBOT. POR TANTO, LOS PARAMETROS DE CALIBRACION DEL ROBOT SE CALCULAN BASANDOSE EN LAS ECUACIONES CINEMATICAS DEL ROBOT, EN LAS SEÑALES DEL TRANSDUCTOR DE POSICION LEIDAS Y ALMACENADAS, Y EN EL RADIO CONOCIDO.
Sección de la CIP Técnicas industriales diversas y transportes
(16/05/1999). Inventor/es: PERSSON, STIG, BRUNMAN, BARBRO. Clasificación: B25J19/00.
UN ROBOT INDUSTRIAL CON MONTAJE DE CABLE COMPRENDE UNOS CABLES DE SEÑAL Y ENERGIA QUE POR MEDIO DE ANILLOS DE ENVUELTA ESTANCA SE EXTIENDEN A TRAVES DE UNA CAJA DE CONEXION DE ENVUELTA ESTANCA CONECTADA A CADA UNIDAD MOTRIZ DE FORMA QUE LOS RESPECTIVOS CABLES SIRVEN A TODAS LAS UNIDADES MOTRICES CONECTADAS A LO LARGO DEL CABLE. DENTRO DE LA RESPECTIVA CAJA DE CONEXION, LOS CABLES ESTAN DESENVAINADOS, POR LO QUE EL NUMERO DE CONDUCTORES QUE CONCIERNEN A LA UNIDAD MOTRIZ EN CUESTION SON DESVIADOS COMO LOS OTROS CONDUCTORES, SIN UNION, JUNTO CON LA PARTE RESTANTE DE LOS CONDUCTORES DESVIADOS QUE PUEDEN PASAR A LA SIGUIENTE UNIDAD MOTRIZ.
CONMUTADOR DE SEGURIDAD PARA MAQUINA INDUSTRIAL.
Secciones de la CIP Física Mecánica, iluminación, calefacción, armamento y voladura Técnicas industriales diversas y transportes
(16/05/1999). Inventor/es: GUNNARSSON, SVEN-ERIC. Clasificación: G05G1/02, F16P3/00, B25J19/06.
LA INVENCION SE REFIERE A UN CONMUTADOR DE SEGURIDAD DISEÑADO PARA SER CONECTADO A UN CIRCUITO DE SEGURIDAD PARA UNA MAQUINA INDUSTRIAL, POR EJEMPLO UN ROBOT INDUSTRIAL. EL CONMUTADOR COMPRENDE UN DISPOSITIVO DE CONTACTO CON UN DISPOSITIVO ACCIONADO A MANO EN EL CUAL UNA VARILLA DE PRESION SE DESPLAZA EN CONTRA DE LA ACCION DE UN MUELLE DE RETORNO DESDE UN PRIMER EXTREMO POR MEDIO DE UNA POSICION DE FUNCIONAMIENTO HASTA UNA SEGUNDA POSICION EXTREMA. EL CIRCUITO DE SEGURIDAD ESTA CERRADO SOLAMENTE EN LA POSICION DE FUNCIONAMIENTO. DURANTE EL MOVIMIENTO DE RETORNO DE LA VARILLA DE PRESION DESDE SU SEGUNDA POSICION HASTA SU PRIMERA POSICION EXTREMA, EL DISPOSITIVO DE CONTACTO NO ES AFECTADO, Y EL CIRCUITO DE SEGURIDAD PERMANECE DE ESTA FORMA ABIERTO DURANTE TODO EL MOVIMIENTO DE RETORNO DEL MISMO.
SISTEMA DE SUMINISTRO DE ENERGIA PARA UN MANIPULADOR.
Sección de la CIP Técnicas industriales diversas y transportes
(16/04/1999). Inventor/es: KULLBORG, OVE, MYKLEBUST, EINAR. Clasificación: B25J9/08.
UN SISTEMA DE SUMINISTRO DE ENERGIA PARA UN MANIPULADOR, POR EJEMPLO UN ROBOT INDUSTRIAL, CUYO MANIPULADOR INCLUYE UNA PLURALIDAD DE ELEMENTOS ACCIONADORES PARA MOVER EL MANIPULADOR A TRAVES DE SU PLURALIDAD DE GRADOS DE LIBERTAD. CADA ELEMENTO ACCIONADOR (1C,1D) COMPRENDE AL MENOS UN MOTOR ELECTRICO DE IMPULSION (2C,2D) Y UN ENGRANAJE DE REDUCCION (3C,3D). LOS MOTORES DE IMPULSION SON ALIMENTADOS Y CONTROLADOS A TRAVES DE UN RECTIFICADOR Y DE UNOS DISPOSITIVOS DE ACCIONAMIENTO (7C,7D). SEGUN LA INVENCION, AL MENOS UNO DE DICHOS DISPOSITIVOS DE ACCIONAMIENTO SE ENCUENTRA COLOCADO SOBRE EL MANIPULADOR AL LADO DE SU ELEMENTO DE ACCIONAMIENTO ASOCIADO (1C,1D). EL RECTIFICADOR PUEDE CONSISTIR TAMBIEN EN UNA PLURALIDAD DE UNIDADES MAS PEQUEÑAS DISPUESTAS SOBRE EL MANIPULADOR Y CADA UNA DE ELLAS PUEDE ALIMENTAR A UN DISPOSITIVO DE ACCIONAMIENTO SOLAMENTE O A UN GRUPO DE ELLOS SOLAMENTE.
DISPOSITIVO DE COLADA CONTINUA EN UN MOLDE.
(16/04/1999) UN DISPOSITIVO PARA FABRICAR CONTINUAMENTE UN HILO FUNDIDO POR FUNDICION CONTINUA DE METAL LIQUIDO, COLADA, DONDE EL FLUJO DE METAL LIQUIDO EN LAS PARTES NO SOLIDIFICADAS DEL HILO, ESTAN CONTROLADAS MEDIANTE UN CAMPO MAGNETICO DE BAJA FRECUENCIA, PERIODICO O ESTATICO. SE ADAPTA UN MOLDE PARA SER ABASTECIDO CON LA COLADA. EL MOLDE COMPRENDE PLANCHAS DE COBRE (2A,2B) QUE FORMAN UN MOLDE DE FUNDICION CON UNA SECCION TRANSVERSAL RECTANGULAR, BAOS TUBULARES DE AGUA LOS CUALES ESTAN COLOCADOS POR FUERA DE LAS PLANCHAS DE COBRE PARA SOPORTARLAS Y ENFRIARLAS, Y UN ELEMENTO QUE SUJETA EL MOLDE. DISPOSITIVOS DE GENERACION DE CAMPO MAGNETICO E IMANES SE PROPORCIONAN PROXIMOS AL MOLDE…
Sección de la CIP Técnicas industriales diversas y transportes
(16/04/1999). Inventor/es: TELLDEN, LEIF. Clasificación: B25J9/10, B25J18/00, B25J9/04.
LA INVENCION SE REFIERE A UN ROBOT INDUSTRIAL CON DOS BRAZOS DE ROBOT INFERIORES DIRIGIDOS HACIA ARRIBA DESDE UN PIE DE ROBOT FIJO , ESTANDO ESTOS EN SUS EXTREMOS INFERIORES PIVOTALMENTE ARTICULADO EN EL PIE , ALREDEDOR DE EJES HORIZONTALES (A1,A2) Y ESTANDO INTERCONECTADAS EN SUS EXTREMOS SUPERIORES PIVOTALMENTE MEDIANTE UN YUGO , Y DE TAL MANERA QUE SE FORMA UNA UNION DE CUATRO BARRAS. LA UNION ESTA PROVISTA CON UNA PRIMERA UNIDAD DIRECCIONAL . UN BRAZO ROBOT SUPERIOR SE ENCUENTRA ARTICULADO ALREDEDOR DE UN QUINTO EJE (D) EN UN ELEMENTO DE FIJACION SOPORTADO POR UN YUGO , Y QUE ESTA ROTATORIAMENTE ARTICULADO ALREDEDOR DE UN SEXTO EJE (C). EL BRAZO ROBOT SUPERIOR Y SU ELEMENTO FIJADOR ESTAN PROVISTOS DE UNA SEGUNDA Y TERCERA UNIDAD DIRECCIONAL (24 Y 26) RESPECTIVAMENTE.
UNIDAD DE MUÑON ROBOTICO INDUSTRIAL.
(16/03/1999) LA INVENCION SE REFIERE A UNA UNIDAD ARTICULADA PARA UN ROBOT INDUSTRIAL QUE CONSTA DE UN ALOJAMIENTO DE LA UNIDAD ARTICULADA DISEÑADO PARA QUEDAR FIJADO DE FORMA DESMONTABLE AL EXTREMO DISTAL DEL BRAZO DE UN ROBOT . EN EL ALOJAMIENTO DE LA UNIDAD ARTICULADA HAY MONTADOS DE FORMA ROTATIVA UN PRIMER Y UN SEGUNDO EJES DE ACCIONAMIENTO SECUNDARIOS , PREFERENTEMENTE PARALELOS, SOBRE CUYOS EXTREMOS DE ENTRADA HAY MONTADOS UNOS ENGRANAJES PREFERENTEMENTE CILINDRICOS PARA ACOPLARSE A UN ENGRANAJE DE ACCIONAMIENTO CILINDRICO CORRESPONDIENTE QUE HAY SOBRE UN EJE DE ACCIONAMIENTO PRIMARIO CORRESPONDIENTE DEL BRAZO DEL ROBOT . VISTO DESDE UNA PROYECCION FINAL, LOS ENGRANAJES Y LOS ENGRANAJES DE ACCIONAMIENTO SE ENCUENTRAN COLOCADOS DE TAL MODO QUE UN LINEA IMAGINARIA (L), QUE…
DIVISION DE CORRIENTE ENTRE TORONES DIFERENTES DE UN DEVANADO SUPERCONDUCTOR.
Sección de la CIP Electricidad
(16/01/1999). Inventor/es: BONMANN, DIETRICH, HORNFELDT, SVEN. Clasificación: H01F36/00.
SE PRESENTA UN DISPOSITIVO PARA CONEXION DE FIBRAS SUPERCONDUCTORAS DE UN BOBINADO (3A), ALIMENTADAS CON CORRIENTE ALTERNA, Y SU CONEXION A CORRIENTE VIA HILOS DE CORRIENTE EN UN CRIOTANQUE, DONDE LOS HILOS DE CORRIENTE DENTRO DEL CRIOTANQUE CONSTAN DE SUBCABLES MUTUAMENTE AISLADOS Y DONDE LOS SUBCABLES SIN AISLAMIENTO INTERMEDIO FUERA DEL CRIOTANQUE SE INTERCONECTAN EN UN CABLE DE CORRIENTE SOLIDO Y DONDE LAS FIBRAS SE CONECTAN DIRECTAMENTE A LOS EXTREMOS DE LOS SUBCABLES.
METODO Y DISPOSITIVO PARA LA CALIBRACION DE LOS EJES DE MOVIMIENTO DE UN ROBOT INDUSTRIAL.
Sección de la CIP Técnicas industriales diversas y transportes
(16/10/1998). Inventor/es: SNELL, JOHN-ERIK. Clasificación: B25J19/00.
EN UN METODO DE CALIBRACION PARA UN ROBOT INDUSTRIAL , UNA HERRAMIENTA DE CALIBRACION SOPORTADA POR LA MANO DEL ROBOT SE PONE EN CONTACTO CON UN CUERPO DE CALIBRACION ESFERICO CON UN RADIO CONOCIDO. POSTERIORMENTE, LAS SEÑALES DE SALIDA DE LOS TRANSDUCTORES DE POSICIONAMIENTO DE LOS EJES DEL ROBOT SON LEIDAS Y ALMACENADAS. ESTE METODO SE REPITE UNA PLURALIDAD DE VECES CON DIFERENTES CONFIGURACIONES DEL ROBOT. POSTERIORMENTE, LOS PARAMETROS DE CALIBRACION DEL ROBOT SE CALCULAN COMENZANDO A PARTIR DE LAS ECUACIONES CINEMATICAS DEL ROBOT, DE UN MODELO DE RELACIONES ENTRE LA POSICION AXIAL Y LA SEÑAL DEL TRANSDUCTOR DE POSICION, DEL RADIO CONOCIDO DEL CUERPO DE CALIBRACION Y DE LAS SEÑALES TRANSDUCTORES DE POSICION LEIDAS Y ALMACENADAS.
PROCEDIMIENTO DE FABRICACION DE UN ESTATOR PARA UNA MAQUINA ELECTRICAGIRATORIA.
(01/10/1998) EN UN METODO PARA FABRICAR UN ESTATOR PARA UNA MAQUINA ELECTRICA ROTATIVA, POR EJEMPLO UNA MAQUINA ASINCRONA, CUYO ESTATOR COMPRENDE UN NUCLEO DE ESTATOR Y UNA CARCASA TUBULAR QUE A LA TEMPERATURA DE FUNCIONAMIENTO DE LA MAQUINA RODEA EL NUCLEO DEL ESTATOR CON UN AJUSTE DE ENCOJIMIENTO, LA FABRICACION DE LA CARCASA CONSTA DE LOS SIGUIENTES PASOS. UN NUMERO DE PERFILES EXTRUIDOS , CADA UNO DEFINIDO POR DOS BORDES Y QUE INCLUYEN UNA SUPERFICIE LIMITADORA LISA CONCAVA LOCALIZADA ENTRE DICHOS BORDES Y FORMADA POR GENERATRICES A LO LARGO DE UN ARCO CON UN RADIO DE CURVATURA QUE SE CORRESPONDE SUSTANCIALMENTE AL DIAMETRO EXTERNO DEL NUCLEO DEL ESTATOR, QUE SE ENCUENTRAN FIJADAS ENTRE SI DE MANERA QUE LAS SUPERFICIES LIMITADORAS CONCAVAS FORMAN UNA CONFIGURACION TUBULAR CON UN DIAMETRO…
(16/06/1998) LA INVENCION SE REFIERE A UN ROBOT INDUSTRIAL HUECO ESPECIALMENTE ADECUADO PARA TRABAJOS DE ELABORACION TALES COMO SOLDADURAS POR PUNTOS O POR ARCO, HERMETIZACION, PINTURA, ENCOLADO, FRESADO POR LASER, ETC. EL ROBOT CONSTA DE UN BRAZO ROBOT INFERIOR TUBULAR , CUYO EXTREMO INFERIOR SE ENCUENTRA ACOJINADO DE FORMA PIVOTANTE EN UN SOPORTE ROBOT ALREDEDOR DE UN PRIMER EJE PREFERENTEMENTE HORIZONTAL Y ACOJINADO DE FORMA ROTATIVA ALREDEDOR DE UN SEGUNDO EJE (B) QUE COINCIDE CON EL EJE LONGITUDINAL DEL BRAZO . HAY UN BRAZO ROBOT SUPERIOR TUBULAR CONECTADO DE FORMA ARTICULADA AL EXTREMO SUPERIOR DEL BRAZO ROBOT INFERIOR A TRAVES DE UN MIEMBRO DE JUNTA ARTICULADA A MODO DE MANGUITO…
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}