CIP-2021 : B62D 1/28 : no mecánicos.
CIP-2021 › B › B62 › B62D › B62D 1/00 › B62D 1/28[2] › no mecánicos.
Notas[t] desde B60 hasta B66: TRANSPORTES O MANUTENCION
Notas[g] desde B62D 1/00 hasta B62D 15/00: Dirección para vehículos de motor o para remolques
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES.
B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M).
B62D 1/00 Mando de la dirección, es decir, medios para producir un cambio en la dirección del vehículo.
B62D 1/28 · · no mecánicos.
CIP2021: Invenciones publicadas en esta sección.
PLATAFORMA OMNIDIRECCIONAL.
(11/02/2019). Solicitante/s: UNIVERSITAT POLITECNICA DE CATALUNYA. Inventor/es: CANUTO GIL,JUAN JOSÉ, DOMÈNECH MESTRES,Carles.
Plataforma omnidireccional.
Plataforma que comprende un primer módulo con una primera rueda motriz y una segunda rueda motriz enfrentadas y coaxiales; un segundo módulo compuesto por un bastidor principal (2a) y por un bastidor auxiliar (2b) articulados entre sí mediante una unión articulada , estando el bastidor principal (2a) soportado sobre el primer módulo mediante un tercer árbol vertical y sobre dos elementos de rodadura de giro libre y auto-orientables, y estando el bastidor auxiliar (2b) soportado en la unión articulada y sobre dos elementos de rodadura de giro libre y auto-orientables; en donde la unión articulada está dotada de un grado de libertad o de dos grados de libertad, y la plataforma incluye al menos un dispositivo de suspensión.
PDF original: ES-2699407_A1.pdf
PLATAFORMA OMNIDIRECCIONAL Y TRANSPORTADOR OMNIDIRECCIONAL.
(29/01/2019). Solicitante/s: UNIVERSITAT POLITECNICA DE CATALUNYA. Inventor/es: CANUTO GIL,JUAN JOSÉ, DOMÈNECH MESTRES,Carles.
Plataforma omnidireccional y transportador omnidireccional.
Plataforma omnidireccional que comprende un primer módulo con al menos de una primera rueda motriz conectada a un primer árbol horizontal accionada mediante un primer actuador y una segunda rueda motriz conectada a un segundo árbol accionada mediante un segundo actuador ; un segundo módulo conectado a dicho primer módulo mediante un tercer árbol vertical accionado mediante un tercer actuador ; un dispositivo de control conectado al primer, segundo y tercer actuadores , en donde el segundo módulo está soportada sobre el primer módulo ; el primer módulo incluye además un elemento de rodadura de giro libre. En una segunda realización la plataforma se sitúa boca abajo quedando sus ruedas accesibles desde un plano de transporte, formando un transportador omnidireccional estático para la transferencia omnidireccional de paquetes.
PDF original: ES-2697921_A1.pdf
Sistema de control de vehículo para controlar la dirección del vehículo.
(21/09/2016) Un sistema de control para controlar la dirección de un aparato de conducción, en el que el sistema está caracterizado por:
un dispositivo de proyección configurado para proyectar la imagen de un volante delante de un asiento del conductor;
un dispositivo de cámara configurado para tomar una imagen de los movimientos de una o dos manos sobre la imagen proyectada del volante ;
un procesador configurado por instrucciones legibles por máquina para:
determinar una posición de una o dos manos de acuerdo con la imagen de una o de las dos manos, calcular un movimiento de una o dos manos de acuerdo con la posición de una o de las dos manos, determinar un ángulo de la dirección y una dirección de la dirección de acuerdo con el movimiento de una o de las dos manos, y
emitir una señal…
Procedimiento para la conducción autónoma en un túnel de lavado y automóvil correspondiente.
(11/03/2015) Procedimiento para la conducción autónoma de un automóvil en un túnel de lavado, caracterizado por:
- la detección de un pasillo del túnel de lavado,
- la detección de una posición de vehículo y una orientación de vehículo del automóvil con respecto al pasillo del túnel de lavado,
- la introducción automática (S2) del automóvil en el túnel de lavado en base a la posición de vehículo y la orientación de vehículo,
- la detención automática (S3) del automóvil en una posición de lavado,
- la recepción o determinación por el automóvil de una señal de fin que señala el final de una etapa de trabajo del túnel de lavado y
- la salida automática (S8) del automóvil…
Procedimientos de ayuda a la salida de estacionamiento de un vehículo.
(16/05/2012) Procedimiento de ayuda para la salida de estacionamiento de un vehículo , que comprende una evaluación de la distancia (DL) entre dicho vehículo y un vehículo adyacente y una condición de final de ayuda, caracterizado porque la variación de distancia evaluada (DL) es un parámetro de determinación de dicha condición de final de ayuda y porque la variación de distancia evaluada (DL) que realiza dicha condición de final de ayuda implica al menos una inversión en el sentido de la variación de la distancia evaluada (DL) en el curso de un período durante el cual el sentido de desplazamiento de dicho vehículo permanece siendo el mismo.
PROCEDIMIENTO Y APARATO PARA LA UTILIZACIÓN DE UN SISTEMA AUTOMÁTICO DE SEGUIMIENTO DEL CARRIL PARA MANTENER LA SEPARACIÓN LATERAL DEL VEHÍCULO.
(15/12/2011) Un procedimiento para pilotar un vehículo que comprende: - la detección de objetos en carriles adyacentes a un carril ocupado por el vehículo que utiliza un sistema de seguimiento del carril; - el ajuste, con relación a por lo menos un objeto detectado, de la posición lateral del vehículo dentro del carril ocupado, en donde se aplica una posición diferente en el carril deseado mediante el sistema de seguimiento del carril sobre la base de la consideración de la distancia lateral a otro objeto en un carril adyacente mediante la modificación los parámetros en el algoritmo de apoyo al seguimiento del carril, caracterizado porque - en un primer nivel de interacción con el conductor con relación a la información,…
PROCEDIMIENTO Y DISPOSITIVO PARA DIRIGIR UN VEHICULO SIN CONTACTO CON LA VIA.
(21/05/2010) Un vehículo que no entra en contacto con un raíl que comprende:
ruedas ;
un cuerpo principal del vehículo soportado por dichas ruedas ; y
un sistema de control de la dirección,
en el que dicho sistema de control de la dirección comprende:
una sección de control configurada para controlar una dirección de dichas ruedas de forma no mecánica; y
una sección de accionamiento configurada para accionar de forma mecánica la dirección de dichas ruedas ,
comprendiendo dicha sección de control:
un primer detector configurado para detectar datos de coordenadas unidimensionales de una ruta objetivo;
una…
PROCEDIMIENTO Y DISPOSITIVO PARA CONDUCIR UN VEHICULO AUTOMOVIL HACIA UNA POSICION DE DESTINO.
(01/04/2007) Procedimiento para conducir un vehículo automóvil hacia una posición de destino; a este efecto, el vehículo automóvil es colocado en una posición de partida, situada cerca de la pretendida posición de destino; después de una primera activación por parte del conductor, el entorno del vehículo automóvil es explorado de manera continua para la detección de la posición de destino, y la posición actual del vehículo es determinada continuamente así como, en base a las informaciones determinadas sobre el entorno y sobre la posición, son determinadas unas informaciones de control para conducir el vehículo automóvil hacia la posición de destino, procedimiento éste que está caracterizado porque a continuación, y después de una segunda activación por parte del conductor, unas órdenes…
SISTEMA DE DIRECCION PARA VEHICULOS.
(01/11/2006). Solicitante/s: DAIMLERCHRYSLER AG. Inventor/es: BOHNER, HUBERT, FREITAG, RAINER, MOSER, MARTIN, SCHNECKENBURGER, REINHOLD.
El sistema de dirección para vehículos a motor reduce el peligro de colisión entre el vehículo equipado y un obst culo. El sistema de dirección tiene un control de la dirección operado por el conductor, por ejemplo, un volante, ruedas del vehículo que pueden ser gobernadas por un dispositivo de control de la dirección, un transductor de generación de solicitud del ángulo de dirección accionado por el control de dirección, un sensor del ángulo actual accionado por las ruedas direccionables, un montaje de regulación y control y un montaje para evitar la colisión . El montaje para evitar la colisión determina un ángulo de dirección que permite que una colisión se produzca entre el vehículo y un obstáculo.
SISTEMA DE DIRECCION EN UN VEHICULO EQUIPADO CON UN DISPOSITIVO DE SEGUIMIENTO DEL CARRIL.
(01/10/2005). Solicitante/s: DAIMLERCHRYSLER AG. Inventor/es: BOHNER, HUBERT, MOSER, MARTIN, SCHROCK, WOLFGANG.
Un sistema de dirección para vehículo a motor con dispositivo de seguimiento de pista tiene un detector de ángulo de dirección accionado por parte del tren de dirección, para determinar el ángulo de dirección actual. El sistema incorpora un detector de ángulo de dirección para determinar el valor de ángulo de dirección actual. El detector actúa con la sección del tren de dirección sobre el lateral de la rueda de dirección del vehículo. Consiste en un detector de medición de ángulo o un detector de medición de distancia , que son accionados pr una parte del tren de dirección, que se mueve cuando se altera el ángulo de dirección de las ruedas de dirección . Un detector de presión mueve el diferencial de presión entre las líneas de motor, que se utilizan por la servoválvula para hacer funcionar el servomotor.
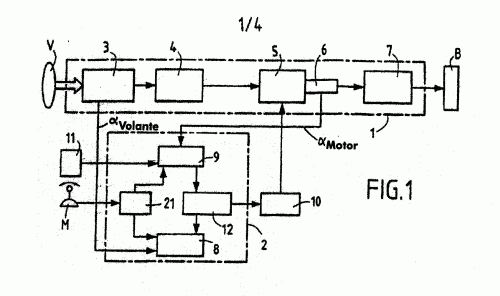
PROCEDIMIENTO Y DISPOSITIVO DE MANDO DE LA DIRECCION DE UN VEHICULO, EN PARTICULAR DE UN UTILITARIO.
(16/12/2004). Ver ilustración. Solicitante/s: RENAULT VEHICULES INDUSTRIELS. Inventor/es: CEYZERIAT, FREDERIC, DAYRE, ERIC, HO, PASCAL.
Procedimiento de mando de una dirección de vehículo automóvil, especialmente de vehículo utilitario, comprendiendo esta dirección un bucle de regulación que está destinado, durante la puesta en práctica de un modo de guiado, y de acuerdo con una señal de consigna de guiado (Cref-g) generada en función de un marcado materializado a lo largo de una trayectoria que el vehículo tiene que efectuar, a mandar un actuador de giro de las ruedas , estando caracterizado este procedimiento porque, para poner en práctica un modo de asistencia de dirección, consiste en inhibir selectivamente la citada señal de consigna de guiado (Cref-g) y, durante esta inhibición, en reemplazar la citada señal de consigna de guiado por una señal de consigna de asistencia de dirección (Cref-a) para mandar el citado actuador en función de una ley de asistencia predeterminada.
PROCEDIMIENTO Y DISPOSITIVO PARA LA GESTION DEL APARCAMIENTO EN LINEA DE VEHICULOS MOTORIZADOS.
(16/09/2004) Procedimiento de gestión del aparcamiento en línea de un vehículo móvil utilizable para aparcar cualquier tipo de vehículo motorizado, del cual se puedan girar las ruedas de un mismo eje, con respecto al entorno vecino que puede encontrarse en la vía pública, los aparcamientos privados y los emplazamientos de producción de las empresas, componiéndose dicho aparcamiento en línea de al menos dos fases a saber una fase de giro y una fase de giro en sentido contrario , y eventualmente de otras dos fases, a saber una fase de emplazamiento que precede a las dos fases de giro y giro en sentido contrario y una fase de recolocación en línea que sigue a la fase de giro en sentido contrario, utilizando dicho procedimiento sensores de medida de distancia,…
SISTEMA DE ASISTENCIA A LA CONDUCCION DE UN VEHICULO, EN PARTICULAR PARA LA APROXIMACION A UN MUELLE.
(01/05/2003) Sistema de ayuda a la conducción de un vehículo sobre una calzada, especialmente, para la aproximación a un muelle de una estación , caracterizado porque comprende: - un marcado codificado que está dispuesto en la calzada a la entrada de la estación y en toda su longitud según un trazado determinado, - un dispositivo de detección del marcado codificado a bordo del vehículo, que suministra informaciones de posición del citado vehículo con respecto al marcado codificado, - un dispositivo de cálculo , para calcular, durante la entrada en estación , la trayectoria del citado vehículo a partir de las informaciones de tipo de estación facilitadas por el marcado, de posición (am,Om) facilitadas por el dispositivo de detección, de velocidad del vehículo y…
METODO Y APARATO PARA GUIAR UN VEHICULO SIN CONDUCTOR.
(16/08/2000). Solicitante/s: JERVIS B. WEBB INTERNATIONAL COMPANY. Inventor/es: ALOFS, CORNELL W., DRENTH, RONALD R.
METODO Y APARATO PARA DIRIGIR UN VEHICULO SIN CONDUCTOR A LO LARGO DE UN CAMINO DEFINIDO POR UN CABLE GUIA , QUE LLEVA UNA CORRIENTE EN UNA SUPERFICIE DE CARRETERA HORIZONTAL E INCLUYE EL MONTAJE DE UNA PRIMERA BOBINA , CON UN EJE PRINCIPAL DE BOBINA, A +45 GRADOS CON RESPECTO A LA HORIZONTAL EN EL VEHICULO , EL MONTAJE DE UNA SEGUNDA BOBINA , CON UN EJE PRINCIPAL DE BOBINA, A -45 GRADOS CON RESPECTO A LA HORIZONTAL DEL VEHICULO , DE MANERA QUE LOS EJES DE LA PRIMERA Y SEGUNDA BOBINAS (18 Y 20) SE INTERSECTAN, DETECTANDO LOS VECTORES DE CAMPO RADIAL Y CIRCULAR DEL CAMPO ELECTROMAGNETICO CON CADA BOBINA (18 O 20), COMPARANDO LA MAGNITUD DEL VECTOR RADIAL CON LA DEL CIRCULAR PARA CADA BOBINA (18 O 20), POR LO QUE SE DETERMINA LA POSICION LATERAL DEL PUNTO DE INTERSECCION DE LOS EJES DE LAS BOBINAS (18 Y 20), CON RESPECTO AL CABLE GUIA PARA INDICAR LA DESVIACION LATERAL DEL VEHICULO CON RESPECTO A LA VIA, Y UTILIZANDO LA INFORMACION DE DESVIACION PARA EL SISTEMA DE MARCHAS DEL VEHICULO.
SISTEMA PARA EL CONTROL AUTOMATICO DEL RECORRIDO EN LOS CARROS DE TRANSPORTE AUTOPROPULSADOS DE GUIADO AUTOMATICO.
(16/04/2000) Sistema para el control automático del recorrido en los carros de transporte autopropulsados de guiado automático. El carro comprende medios para variar su dirección, para mantener con su eje (A) alineado con un recorrido fijo preestablecido; una pista fija está constituida por una pluralidad de primeros imanes dispuestos en el suelo; el carro comprende un primer dispositivo de detección , para detectar el desplazamiento del eje (A) con respecto a los primeros imanes y hacer variar la dirección a fin de anular el desplazamiento; a lo largo de la pista está dispuesta una pluralidad de segundos imanes , en posiciones prefijadas de control/referencia, con un campo magnético distinto al de los primeros imanes ; sobre el carro está dispuesto un segundo dispositivo de detección , en correspondencia de un centro de referencia (P), para detectar…
UN SISTEMA DE AYUDA AL CONDUCTOR PARA UN VEHICULO.
(16/05/1997). Solicitante/s: LUCAS INDUSTRIES PUBLIC LIMITED COMPANY. Inventor/es: APPLEYARD, MICHAEL, WILSON JONES, RUSSELL, TRIBE, RAGLAN HORATIO ANDREW HAROLD.
SE MONTAN UNA CAMARA DE VIDEO O DETECTOR EQUIVALENTE EN UN VEHICULO Y SE UTILIZAN PARA DETECTAR LAS MARCAS VIALES COLOCADAS EN LA CARRETERA (NORMALMENTE LAS LINEAS PINTADAS DE BLANCO). UN PROCESADOR DE SEÑALES ASOCIADO ESTIMA LA POSICION LATERAL DEL VEHICULO EN RELACION A LAS MARCAS VIALES. SE UTILIZA UN MOTOR ELECTRICO ACOPLADO AL MECANISMO DE LA DIRECCION PARA PROPORCIONAR UNA ENTRADA DE PAR A LA DIRECCION QUE PUEDE BIEN AYUDAR U OPONERSE AL PAR DE LA DIRECCION DEL CONDUCTOR. EL PROCESADOR ESTA DISEÑADO PARA QUE AYUDE AL CONDUCTOR A MANTENER LA POSICION VIAL DEL VEHICULO A BASE DE MANTENER AL VEHICULO EN UN PUNTO PREESTABLECIDO UTILIZANDO UN PAR DE POLARIZACION. ESTO SIMULA EL EFECTO DE QUE LA VIA SE INCLINA HACIA ARRIBA HACIA LOS BORDES VIALES. NO OBSTANTE EL CONDUCTOR PUEDE ANULAR O CANCELAR EL EFECTO SI APLICA UN PAR DE DIRECCION QUE SOBREPASE UN VALOR UMBRAL DEL PAR PREDETERMINADO.
PERFECCIONAMIENTOS EN CARROS SIN CONDUCTOR CON MEDIOS DE DIRECCION AUTOMATICOS.
(01/11/1980). Solicitante/s: CARRAGO TRANSPORTSYSTEM AB.
DISPOSITIVO DE CARROS SIN CONDUCTOR CON MEDIOS DE DIRECCION AUTOMATICOS. CONSTA DE UN CHASIS DE CARRO, MEDIOS DE MOTOR Y DE TRANSMISION PARA ACCIONAR AL MENOS UNA DE LAS RUEDAS, MEDIOS DE COJINETES UNIDOS AL CHASIS Y HACER POSIBLE QUE EL CARRO GIRE ALREDEDOR DE UN EJE DE GIRO VERTICAL QUE SE CORTA CON DICHO EJE GEOMETRICO UNICO Y MEDIOS DE DIRECCION PARA AJUSTAR LA POSICION DE DICHO EJE RESPECTO AL CHASIS, ESTANDO CARACTERIZADO PORQUE COMPRENDE UNOS MEDIOS DE CONTROL DE LA POSICION DEL EJE DE GIRO, QUE INCLUYEN AL MENOS UNA RUEDA DE MEDICION DISPUESTA PARA HACER CONTACTO CON LA SUPERFICIE SOPORTE DEL CARRO Y MEDIOS GENERADORES DE SEÑALES DISPUESTOS PARA SER ACTUADOS POR AL MENOS UNA RUEDA DE MEDICION, PROPORCIONANDO UNA SEÑAL DE SALIDA DERIVADA DE LA GENERADA POR LOS GENERADORES DE SEÑALES CON SIGNO REPRESENTATIVO DEL SENTIDO DE AVANCE Y MAGNITUD REPRESENTATIVA DEL REGIMEN DE VELOCIDAD DE UN PUNTO PREDETERMINADO.
PERFECCIONAMIENTOS EN TRANSPORTADORES AUTOMATICOS DE CAMPO SIN CARRILES.
(16/07/1976). Solicitante/s: BURO PATENT AG.
Resumen no disponible.
{kind=link}