Método y dispositivo para ajuste y control.
(06/11/2013) Un método para ajustar un controlador que controla una propiedad (p(t)) de un proceso industrial que tieneun caudal de materiales variable, pero conocido, cuyo método comprende:
- la inyección de señales de excitación añadidas a la señal de salida del controlador (U(t)),
- la recepción de medidas (z(t)) de dicha propiedad en respuesta a dichas señales de excitación,
- la selección de una primera estructura de modelo de proceso que comprende uno o varios parámetrosdesconocidos,
- la estimación del valor de dichos uno o más parámetros desconocidos, basándose en dichas medidas (z(t)) dedicha propiedad y en una señal…
MÉTODO PARA LA OPTIMIZACIÓN DE UNA SEÑAL DE EXCITACIÓN O CONTROL TRANSITORIA QUE ACTÚA EN UN SISTEMA VIBRATORIO CON EL FIN DE REDUCIR LA VIBRACIÓN RESIDUAL GENERADA.
(04/04/2013) Método para la optimización de una señal de excitación o control transitoria que actúa en un sistema vibratorio con el fin de reducir la vibración residual generada.
La presente invención tiene por objetivo la reducción de vibraciones residuales provocadas por la excitación de una señal transitoria en sistemas vibratorios con comportamiento lineal. Esta señal corresponde, por ejemplo, a una ley de movimiento de una inercia o de una fuerza excitadora.
Partiendo de una señal base a optimizar, se parametriza ésta con tantos parámetros como ecuaciones tiene el sistema definido por la condición necesaria suficiente de vibración residual nula. Esta equivale, para un modo propio de vibración, a un sistema implícito de dos ecuaciones con dos incógnitas. En sistemas…
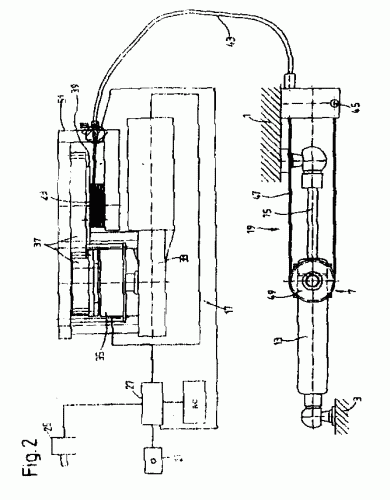
SISTEMA DE MANIOBRA COMPRENDIENDO UN GRUPO DE PISTON-CILINDRO COMBINADO CON UN DISPOSITIVO DE ACCIONAMIENTO.
(01/04/2005). Ver ilustración. Solicitante/s: STABILUS GMBH. Inventor/es: MINTGEN, ROLF, RITTER, ANDREAS, RISSEL,RALF.
Sistema de maniobra comprendiendo un grupo de pistón-cilindro combinado con un dispositivo de accionamiento que está en unión operativa con una parte a mover, y en donde un sistema de mando vigila el movimiento de la parte a mover y detecta un obstáculo cuando un parámetro representativo del movimiento difiere de un parámetro almacenado en memoria por encima de un límite umbral, captando un sensor el número de revoluciones de una parte móvil en un punto de medida de referencia, formando el sistema de mando un diferencial del número de revoluciones con respecto al tiempo, comparándose el diferencial en una unidad de comparación con un valor diferencial que corresponde a un punto de medida sobre un trayecto de movimiento de la parte móvil, y reconociéndose un obstáculo al presentarse entre el diferencial medido y el valor almacenado correspondiente una diferencia por encima de un valor umbral.
{kind=link}